挖掘计划制作装置、作业机械以及挖掘计划制作方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及挖掘计划制作装置、作业机械以及挖掘计划制作方法。
本申请基于2020年5月29日在日本提出申请的特愿2020-094297号而主张优先权,并将其内容援引于此。
背景技术
在专利文献1中公开了用于决定可高效地进行挖掘处理的策略的方法等。在专利文献1所记载的方法中,挖掘区域的分割、挖掘顺序根据基于熟练操作员的经验知识的规则来决定。另外,在决定铲斗的最佳的位置和朝向时,为了预测在挖掘中铲斗遭遇的阻力,也考虑物质的状态(例如,湿沙或未凝固的土)。
在先技术文献
专利文献
专利文献1:日本特开平11-247230号公报
发明内容
发明要解决的课题
然而,挖掘计划中的作业效率例如能够根据挖掘土量和作业时间来定义。其中,挖掘土量例如根据挖取土量、从挖取后的铲斗溢出的土量、向挖掘部位坍塌的倒塌土量等来决定。这些土量根据挖掘部位的土质(例如是沙子还是粘土)而大幅变化。
在专利文献1所记载的方法中,虽然对于土质所涉及的参数一定程度上进行了考虑,但由于区域的分割、挖掘顺序的决定按照一定的规则进行,因此存在有时考虑不充分的课题。
本发明鉴于上述情况而提出,其目的在于,提供一种在制作挖掘计划时能够适当地考虑土质的影响的挖掘计划制作装置、作业机械以及挖掘计划制作方法。
用于解决课题的手段
为了解决上述课题,本发明的一方式是一种挖掘计划制作装置,其具备:存储部,其存储以挖掘效率作为评价值并使与土质有关的参数分别不同而进行了机器学习而成的多个计划模型,该计划模型是输入地形信息且输出挖掘轨迹和回转方向的计划值的机器学习模型;土质推断部,其推断土质;地形信息取得部,其取得地形信息;以及计划值计算部,其基于所述土质推断部推断出的土质来选择所述计划模型,向所选择的所述计划模型输入所述地形信息取得部取得的地形信息,并作为所述计划模型的输出而计算所述计划值。
发明效果
根据本发明,在制作挖掘计划时能够适当地考虑土质的影响。
附图说明
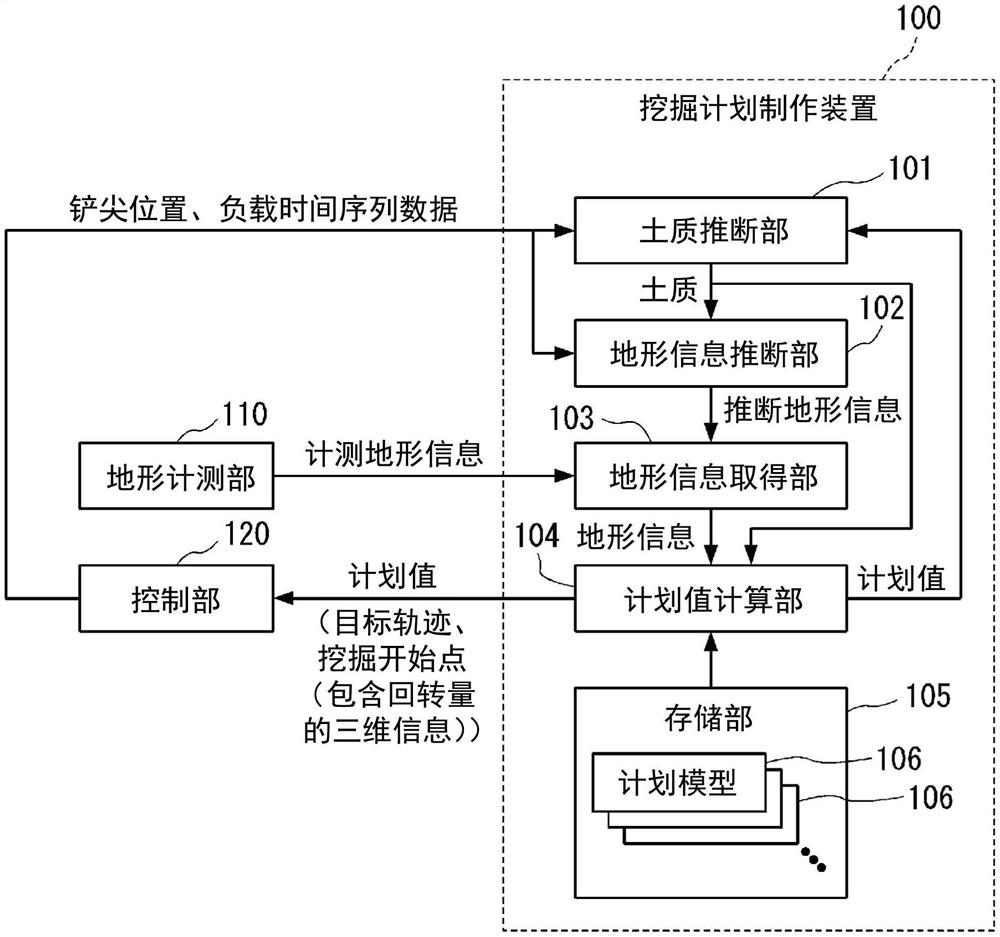
图1是示出本发明的一实施方式的挖掘计划制作装置的结构例的框图。
图2是示出作为搭载图1所示的挖掘计划制作装置100的作业机械的液压挖掘机1的结构例的立体图。
图3是示出图1所示的挖掘计划制作装置100的动作例的流程图。
图4是用于说明图1所示的土质推断部101的动作例的示意图。
图5是用于说明图1所示的地形信息推断部102的动作例的示意图。
图6是示出图1所示的计划模型106的学习的方法的一例的示意图。
图7是示意性地示出图2所示的液压挖掘机1的动作例的俯视图。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。需要说明的是,在各图中,对于相同或对应的结构使用相同的附图标记并适当省略说明。
图1是示出本发明的一实施方式的挖掘计划制作装置100的结构例的框图。图2是示出作为搭载图1所示的挖掘计划制作装置100的作业机械的液压挖掘机1的结构例的立体图。
图1所示的挖掘计划制作装置100例如能够使用微型计算机、FPGA(FieldProgrammable Gate Array)等计算机、或者计算机与其周边电路或周边装置等而构成。并且,挖掘计划制作装置100作为由计算机、周边电路、周边装置等硬件与计算机执行的程序等软件的组合构成的功能性结构而具备土质推断部101、地形信息推断部102、地形信息取得部103、计划值计算部104、以及存储部105。本实施方式的挖掘计划制作装置100例如如图2所示那样搭载于液压挖掘机1等作业机械(挖掘机械)。液压挖掘机1具备图1所示的挖掘计划制作装置100、计测地形信息的地形计测部110、以及对液压挖掘机1的各部分进行控制的控制部120。
图2所示的液压挖掘机1具有作为主体部的车辆主体1B、以及工作装置2。车辆主体1B具有作为回转体的上部回转体3、以及作为行驶体的行驶装置5。上部回转体3在机关室3EG的内部收容有作为动力产生装置的发动机以及液压泵等装置。在实施方式中,对于作为动力产生装置的发动机,液压挖掘机1使用例如柴油发动机等内燃机,但动力产生装置并不限定于内燃机。液压挖掘机1的动力产生装置例如也可以是将内燃机、发电电动机以及蓄电装置组合而成的、所谓的混合动力方式的装置。另外,液压挖掘机1的动力产生装置也可以是不具有内燃机而组合了蓄电装置和发电电动机的装置。
上部回转体3具有驾驶室4。在图2所示的例子中,驾驶室4设置于上部回转体3的与配置有机关室3EG的一侧相反的一侧。但是,驾驶室4与机关室3EG的位置关系并不限定于该例子。在上部回转体3的上方安装有扶手9。
行驶装置5搭载上部回转体3。行驶装置5具有履带5a、5b。行驶装置5驱动设置于左右的液压马达5c的一方或者双方。通过行驶装置5的履带5a、5b旋转,从而使液压挖掘机1行驶。工作装置2安装于上部回转体3的驾驶室4的侧方侧。
液压挖掘机1也可以具备取代履带5a、5b而具有轮胎、且将发动机的驱动力经由变速器向轮胎传递而能够行驶的行驶装置。作为这样的方式的液压挖掘机1,例如具有轮式液压挖掘机。另外,液压挖掘机1也可以是具有如下构造的例如反铲式装载机:具备上述那样的具有轮胎的行驶装置,而且在车辆主体(主体部)安装有工作装置,且不具备图2所示那样的上部回转体3及其回转机构。即,反铲式装载机也可以在车辆主体安装有工作装置,且具备构成车辆主体的一部分的行驶装置。
上部回转体3的配置有工作装置2以及驾驶室4的一侧为前,配置有机关室3EG的一侧为后。上部回转体3的前后方向为y方向。朝前时左侧为上部回转体3的左,朝前时右侧为上部回转体3的右。上部回转体3的左右方向也称作宽度方向或者x方向。液压挖掘机1或者车辆主体1B以上部回转体3为基准而行驶装置5的一侧为下,以行驶装置5为基准而上部回转体3的一侧为上。上部回转体3的上下方向为z方向。在液压挖掘机1设置于水平面的情况下,下为铅垂方向、即重力的作用方向侧,上为与铅垂方向相反的一侧。
工作装置2具有动臂6、斗杆7、作为作业工具的铲斗8、动臂缸10、斗杆缸11、以及铲斗缸12。动臂6的基端部经由动臂销13以能够转动的方式安装于车辆主体1B的前部。斗杆7的基端部经由斗杆销14以能够转动的方式安装于动臂6的前端部。在斗杆7的前端部经由铲斗销15安装有铲斗8。铲斗8以铲斗销15为中心转动。铲斗8在与铲斗销15相反的一侧安装有多个斗齿8B。铲尖8T是斗齿8B的前端。
铲斗8也可以不具有多个斗齿8B。换句话说,也可以是如下那样的铲斗:不具有图2所示那样的斗齿8B,且铲尖由钢板形成为直线形状。工作装置2例如也可以具备具有单个斗齿的倾转铲斗。倾转铲斗是指如下那样的铲斗:具备铲斗倾转缸,通过铲斗向左右倾转倾斜,从而即使液压挖掘机处于倾斜地,也能够将斜面、平地成形为自由的形状或将其整平,还能够进行基于底板的碾压作业。此外,工作装置2也可以取代铲斗8而具备法面铲斗、或具有凿岩用的凿子的凿岩用的配件等来作为作业工具。
图2所示的动臂缸10、斗杆缸11、以及铲斗缸12分别是通过从液压泵排出的工作油的压力来进行驱动的液压缸。动臂缸10驱动动臂6而使其升降。斗杆缸11驱动斗杆7而使其绕斗杆销14转动。铲斗缸12驱动铲斗8而使其绕铲斗销15转动。
另外,工作装置2具备未图示的第一行程传感器、第二行程传感器以及第三行程传感器。第一行程传感器设置于动臂缸10,第二行程传感器设置于斗杆缸11,第三行程传感器设置于铲斗缸12。第一行程传感器检测动臂缸10的长度即动臂缸长并将其输出至控制部120。第二行程传感器检测斗杆缸11的长度即斗杆缸长并将其输出至控制部120。第三行程传感器检测铲斗缸12的长度即铲斗缸长并将其输出至控制部120。
如动臂缸长、斗杆缸长以及铲斗缸长被决定,则工作装置2的姿态被决定。因此,检测它们的第一行程传感器、第二行程传感器以及第三行程传感器相当于检测工作装置2的姿态的姿态检测装置。姿态检测装置并不限定于第一行程传感器、第二行程传感器以及第三行程传感器,也可以是角度检测器。
控制部120根据第一行程传感器检测的动臂缸长,计算动臂6相对于液压挖掘机1的坐标系即局部坐标系中的与水平面正交的方向(z轴方向)的倾斜角。控制部120还根据第二行程传感器检测的斗杆缸长,计算斗杆7相对于动臂6的倾斜角。控制部120还根据第三行程传感器检测的铲斗缸长,计算铲斗8相对于斗杆7的倾斜角。动臂6、斗杆7以及铲斗8的倾斜角是表示工作装置2的姿态的信息。
在上部回转体3的上部安装有天线21、22。天线21、22用于检测液压挖掘机1的当前位置。天线21、22与控制部120(或其周边电路)连接。控制部120(或其周边电路)使用天线21、22接收基于RTK-GNSS(Real Time Kinematic-Global Navigation SatelliteSystems,GNSS称作全球导航卫星系统)的电波,从而检测液压挖掘机1的当前位置。与天线21、22接收的GNSS电波相对应的信号输入至控制部120,从而计算全局坐标系中的天线21、22的设置位置。作为全球导航卫星系统的一例,可举出GPS(Global Positioning System),但全球导航卫星系统并不限定于此。
如图2所示,天线21、22优选设置于上部回转体3上,且设置于在液压挖掘机1的左右方向即宽度方向上分开的两端位置。在实施方式中,天线21、22安装于在上部回转体3的宽度方向两侧分别安装的扶手9。天线21、22在上部回转体3上安装的位置并不限定于扶手9,但天线21、22设置于尽可能分开的位置的话,则液压挖掘机1的当前位置的检测精度提高,因而优选。另外,天线21、22优选设置于尽量不妨碍操作员的视野的位置。
另外,液压挖掘机1具备拍摄装置19。拍摄装置19例如是立体相机,例如对液压挖掘机1的作业对象的区域进行拍摄,并将拍摄到的图像输出至拍摄装置19所具备的地形计测部110。地形计测部110基于拍摄装置19拍摄到的视差图像,制作三维的地形信息并将其作为计测地形信息向挖掘计划制作装置100输出。拍摄装置19例如设置于上部回转体3的驾驶室4的上方。但是,拍摄装置19设置的场所并不限定于驾驶席4的上方。例如,拍摄装置19也可以设置于驾驶室4的内部且上方。需要说明的是,地形计测部110也可以取代拍摄装置19或者与其一并地使用三维激光测距仪、三维激光扫描仪、三维距离传感器等来制作地形信息。
返回图1,地形计测部110制作表示三维的地形信息的计测地形信息,并将其例如每隔规定周期向挖掘计划制作装置100输出。
另外,控制部120从挖掘计划制作装置100输入基于挖掘计划的计划值来控制工作装置2和上部回转体3,并且将表示铲尖8T的位置(三维位置)和工作装置2的负载的时间序列数据向挖掘计划制作装置100输出。在此,工作装置2的负载通常根据缸压、泵压来计测。在本实施方式中,工作装置2的负载例如能够由各缸10~12的负载压等来表示,包括挖掘时的负载(挖掘负载)和非挖掘时(回转时等)的负载。另外,挖掘负载是指挖掘阻力。挖掘计划例如是如图7所示那样将一定范围内A100挖掘至成为目标土量、目标地形为止的计划,计划值是表示挖掘轨迹和回转方向的信息,例如是由目标轨迹、挖掘开始点等数据构成的包含回转量的三维信息。图7是示意性地示出图2所示的液压挖掘机1的动作例(对一定范围内A100进行挖掘、并将挖掘物装入自卸车400时的动作例)的俯视图。
土质推断部101输入从控制部120输入的表示铲尖位置和负载的时间序列数据、以及后述的计划值计算部104计算出的计划值,并基于计划值指示的铲尖位置的轨迹(称作计划轨迹)与实际的铲尖的轨迹的偏差来推断土质。在本实施方式中,计划值基于土质的推断结果来计算。因此,在推断的土质与实际的土质存在差异的情况下,存在计划轨迹与实际的轨迹的偏差变大的倾向。例如如图4所示,可知在计划轨迹201与实际的轨迹203的偏差比计划轨迹201与实际的轨迹204的偏差大的情况下,得到实际的轨迹203时的土质的推断结果与得到实际的轨迹204时的土质的推断结果相比,推断值与实际值之差较大。因此,土质推断部101基于计划轨迹与实际的铲尖位置的轨迹的偏差,例如在实际的轨迹比计划值浅的情况下能够推断为实际的土质是挖掘阻力比推断土质大的土质,在计划值与实际的轨迹之差较小的情况下能够推断为实际的土质是与推断土质相近的土质。需要说明的是,土质例如既可以由土、砂、粘土等种类来表示,也可以由挖掘阻力、水分的含有量等值、或者基于这些值的指标值等来表示。需要说明的是,图4是用于说明图1所示的土质推断部101的动作例的示意图,示意性地示出挖掘面200、计划轨迹201、以及实际的轨迹(的例子)203及204的剖视图。
地形信息推断部102输入从控制部120输入的表示铲尖位置和负载的时间序列数据、以及土质推断部101推断出的土质,推断三维的地形信息并将其作为推断地形信息向地形信息取得部103输出。地形信息推断部102例如将地形信息计测部110取得的计测地形信息作为初始值(或基准值),并基于从控制部120输入的表示铲尖位置的时间序列数据、以及土质推断部101推断出的土质,来推断地形信息。或者,地形信息推断部102例如也可以将基于事先的航拍图像等制作出的地形信息作为初始值(或基准值)。在该情况下,例如能够省略地形计测部110。例如如图5所示,地形信息推断部102对于挖掘前的挖掘面211,在挖掘时的实际的铲尖的轨迹作为轨迹212而得到的情况下,假定为挖掘后地形与挖掘轨迹212相等(不存在位于比挖掘轨迹212靠上方的土)。接下来,地形信息推断部102将从铲斗溢出的土量的推断值与基于轨迹212的现况地形相加而求出加法后的地形213。接下来,地形信息推断部102假定倒塌量,实施基于移动平均的平滑化来计算地形214。需要说明的是,溢出土量、倒塌量例如可以设为挖取土量的一定比例,另外,溢出土量、倒塌量也可以根据土质而变化。另外,移动平均可以仅设为存在土的变化的周边。需要说明的是,地形信息作为三维信息来计算,因此例如也可以使用高斯滤波器等来进行平滑化处理。需要说明的是,图5是用于说明图1所示的地形信息推断部102的动作例的示意图,示意性地示出挖掘面211、实际的轨迹(的例子)212、以及推断出的地形213及214的剖视图。
地形信息取得部103输入(取得)计测地形信息和推断地形信息,在能够从地形计测部110正常地取得计测地形信息的情况下,选择计测地形信息并将其作为地形信息向计划值计算部104输出。另外,地形信息取得部103在从地形计测部110无法正常地取得计测地形信息的情况下,选择推断地形信息并将其作为地形信息向计划值计算部104输出。
另一方面,存储部105存储多个计划模型106。多个计划模型106例如是在制作在以作业机械1为基准的一定范围内成为目标土量、目标地形(例如挖掘后的斜面形状)为止的挖掘计划时,输入地形信息且输出挖掘轨迹和回转方向的计划值的机器学习模型,且是将挖掘效率作为评价值并使与土质有关的参数分别不同而进行了机器学习后的机器学习模型。计划模型106例如是以神经网络为要素的学习完成模型,通过机器学习来优化神经网络的各层的神经元间的加权系数,以使得输出针对输入的大量的数据求出的解。计划模型106例如由进行从输入至输出为止的运算的程序与在该运算中使用的加权系数(参数)的组合构成。在此,参照图6,对计划模型106的学习的方法进行说明。
图6是示出图1所示的计划模型106的学习的方法的一例的示意图。在图6所示的例子中,计划模型106通过强化学习来进行机器学习。计划模型106输入由挖掘模拟器301生成的地形信息(挖掘后地形302),并将输出的挖掘轨迹及回转方向303向挖掘模拟器301输入。挖掘模拟器301包括地形模型305、以及车身模型及控制模型307。地形模型305输入土质304并且输入铲尖通过轨迹308来作为参数,输出挖掘后地形302、挖掘阻力306、以及挖掘土量310。车身模型及控制模型307输入挖掘轨迹及回转方向303、以及挖掘阻力306,输出铲尖通过轨迹308、以及挖掘时间及回转时间309。强化学习算法312将在评价311中计算出的挖掘作业的效率作为评价值,通过现有的强化学习算法的方法对计划模型106进行更新。需要说明的是,挖掘作业的效率例如能够通过将挖掘土量除以作业时间(=挖掘时间+回转时间)来求出。另外,在评价311中,进行针对适合于挖掘计划中的目标地形(例如挖掘范围和挖掘形状的目标值)的挖掘而提高评价值、针对不适合于目标地形的挖掘而降低评价值的处理。例如,在作为目标地形而赋予了禁止(土方开挖(square dig))挖掘范围外的挖掘且在近前处尽可能地余留60度的斜面这样条件的情况下,进行对于范围外的挖掘不给于报酬、对于破坏60度的斜面的挖掘给予针对范围内的挖掘的报酬的几分之一~几十分之一的报酬这样的评价,从而计算报酬(评价值)。需要说明的是,地形模型305设为在土质304发生了变化的情况下挖掘后地形302、挖掘阻力306、以及挖掘土量310中的至少一个变化的模型。在一个计划模型106的机器学习中,土质304的值固定。在该情况下,各计划模型106成为对应于土质304的值的模型。
另外,计划值计算部104基于土质推断部101推断出的土质来选择计划模型106,向所选择的计划模型106输入地形信息取得部103取得(输出)的地形信息,并作为计划模型106的输出而计算计划值。此时,计划值计算部104选择例如操作员设定的挖掘计划(目标土量、目标形状)与学习时的挖掘计划(目标土量、目标形状)的设定相等的计划模型106。
接下来,参照图3,对图1所示的挖掘计划制作装置100的动作例进行说明。图3是示出图1所示的挖掘计划制作装置100的动作例的流程图。
例如,液压挖掘机1的操作员在使液压挖掘机1移动至挖掘的开始位置、且将挖掘方向调整为规定的方向后,在指示自动挖掘开始时,挖掘计划制作装置100按照规定的周期反复执行步骤2~步骤S6的处理(“开始”~步骤S1中的“是”),直至以下自动挖掘的结束条件成立(至在步骤S6中成为“是”为止)。在步骤S2中,地形信息取得部103将地形计测部110输出的计测地形信息和地形信息推断部102输出的推断地形信息中的一方作为地形信息而取得并向计划值计算部104输出。接下来,土质推断部101推断土质(步骤S3)。接下来,计划值计算部104基于土质以及操作员设定的挖掘计划(目标土量、目标形状),从存储部105选择计划模型106(步骤S4)。接下来,计划值计算部104向所选择的计划模型106输入地形形状,并作为计划模型106的输出而计算计划值(步骤S5)。接下来,挖掘计划制作装置100(例如计划值计算部104)判断是否满足结束条件(例如挖掘计划是否结束)(步骤S6)。
通过以上的处理,挖掘计划制作装置100能够基于挖掘计划而自动控制液压挖掘机1。此时,由于对应于土质来选择计划模型106,因此挖掘计划制作装置100在制作挖掘计划(基于挖掘计划计算计划值)时,能够适当地考虑土质的影响。
以上,参照附图对本发明的实施方式进行了说明,但具体结构并不局限于上述实施方式,也包括不脱离本发明的主旨的范围的设计变更等。例如也可以是,在制作计划模型106时,除了土质之外,例如还将挖掘深度的限制值作为参数向车身模型及控制模型307输入。例如,如果使土质在土和砂这两个种类、使挖掘深度的限制值在1m、80cm、60cm这三个种类间变化来进行强化学习,则能够制作六个种类的计划模型106。另外,机器学习的方法并不限定于强化学习,例如也可以是监督学习。另外,对于计划值计算部104计算出的计划值,也可以取代向控制部120输出的方式,而是以作为目标值使操作员能够视觉辨认的显示方式输出至规定的显示部。
另外,在上述实施方式中计算机执行的程序的一部分或者全部可以经由计算机可读取的记录介质、通信线路来分布。
工业实用性
在制作挖掘计划时能够适当地考虑土质的影响。
附图标记说明:
1...液压挖掘机(作业机械);100...挖掘计划制作装置;102...地形信息推断部;103...地形信息取得部;104...计划值计算部;105...存储部;106...计划模型。
- 作业计划制作装置以及作业计划制作方法
- 装箱作业计划制作装置及装箱作业计划制作方法