一种驾驶模拟系统及其控制方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及驾驶模拟器,尤其涉及汽车操稳平顺开发以及测试验证范畴。
背景技术
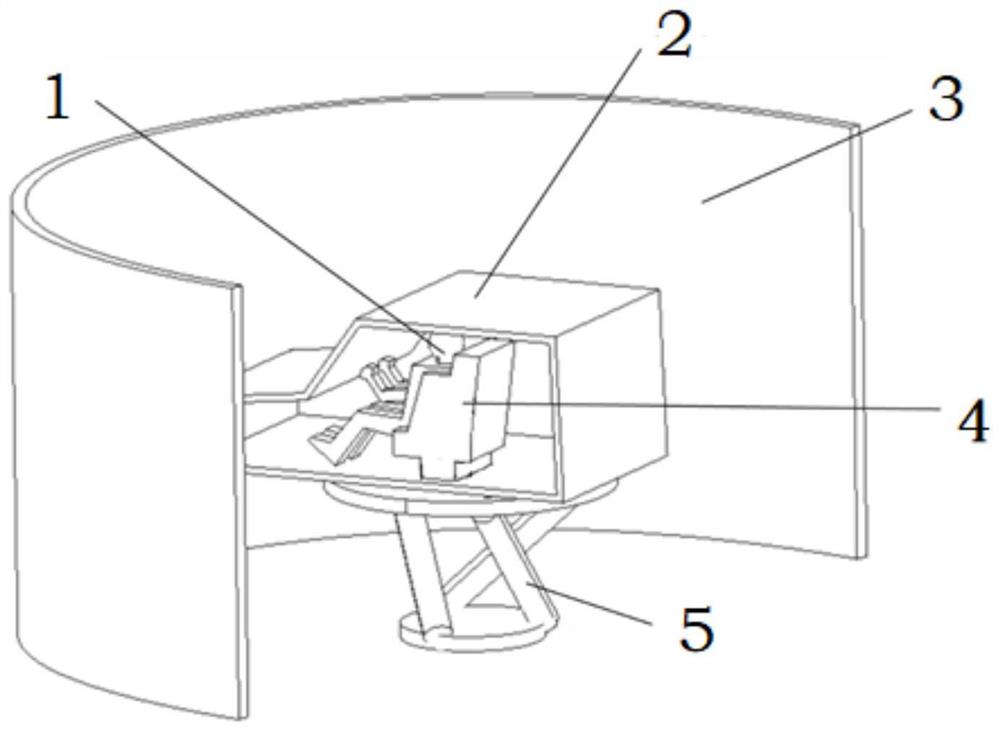
多自由度驾驶模拟器是先进的汽车开发工具,该模拟器主要由运动子系统,视景子系统以及驾驶舱组成,如图1所示。其中运动子系统采用电动或者液压的驱动方式,在有限的空间内模拟汽车大范围运动的状态。视景子系统则通过显示屏幕,模拟驾驶员可以看到的周边环境。驾驶舱则尽量复现实车内饰和视野。驾驶模拟器如果能够完全复现实车的驾乘感受,对于整车的前期开发有重要意义,可以大大缩短整车操稳平顺性能的开发时间。
当前的驾驶模拟器对于整车的姿态模拟已经相对比较精确,但是对于驾驶员的体感模拟则存在较大的误差,尤其是对于驾驶员加速度感觉的模拟,很难在较小的运动范围内完全复现驾乘体感,导致驾乘模拟器的加速度模拟范围一般小于0.6g,而且很难精确模拟长时间>10s的单向加速度体感。然而,在实车驾乘中,较长时间的加速是经常发生的,而且最大加速度经常超过0.7g,而且有超过1g的情况出现,因此体感模拟尤其是加速度体感模拟成为驾驶员模拟器的瓶颈。
发明内容
本发明所要解决的技术问题是实现一种能够模拟驾乘过程中受到长时间持续加速度情况的驾驶模拟系统,使整车的加速度方向上施加和人体质量和加速度乘积大小的力,并且能够将这个力需要尽量均匀地分布在人体上。
为了实现上述目的,本发明采用的技术方案为:一种驾驶模拟系统,系统设有座椅,所述座椅的前部和两侧设有视景子系统,系统配有供驾驶员穿着的上衣,所述上衣表面均匀固定有永磁体,所述座椅的后侧设有椅背,两侧设有护翼,所述椅背和护翼内均固定电磁铁单元。
所述电磁铁单元由串联的电磁铁、开关、电源、可调电阻构成。
所述椅背上的电磁铁单元由两个电极相反的电源并联后串联在电磁铁单元的电路内,该电磁铁单元的开关设有三个选择性的档位,分别是空挡断路,以及连接两个不同电源的档位。
两侧所述护翼内的电磁铁单元通过串联的可调电阻、电磁铁并联接入电磁铁单元,同侧护翼内的电磁铁绕线方向相同,两侧护翼电磁铁的绕线方向相同。
所述上衣表面的永磁体朝向外侧的磁极相同。
所述椅背和护翼内的电磁铁单元均设有多个电磁铁,所述电磁铁均匀的布置在椅背和护翼内,系统设有总控制器,所述总控制器连接并输出控制信号至电磁铁单元。
所述座椅固定在驾驶舱内,所述驾驶舱的底部固定在运动子系统上,所述总控制器连接并输出控制信号至运动子系统。
所述视景子系统为弧形屏幕,所述总控制器连接并输出控制信号至弧形屏幕。
基于所述驾驶模拟系统的控制方法,系统工作时,总控制器驱动运动子系统和视景子系统工作;
当运动存在前向加速度时控制椅背的电磁铁单元向上衣提供排斥力;
当运动存在后向加速度时控制椅背的电磁铁单元向上衣提供吸引力;
当运动存在左向加速度时控制左侧护翼的电磁铁单元向上衣提供吸引力,右侧护翼的电磁铁单元向上衣提供排斥力;
当运动存在右向加速度时控制左侧护翼的电磁铁单元向上衣提供排斥力,右侧护翼的电磁铁单元向上衣提供吸引力。
总控制器控制电磁铁单元的可调电阻,根据当前加速度的大小控制相应电磁铁的吸引力或排斥力。
本发明通过让驾驶员穿上均匀分布永磁铁的衣服,并在驾驶员乘坐的座椅的左右护翼和靠背内部布置电磁铁,使得系统能够根据需要模拟的加速度大小和方向,调整电磁铁的电流大小,通过衣服对驾驶员躯干的作用来模拟人体在驾乘过程中的受力情况。
附图说明
下面对本发明说明书中每幅附图表达的内容及图中的标记作简要说明:
图1为驾驶模拟系统结构示意图;
图2、3为驾驶员乘坐在驾驶模拟系统座椅上的示意图;
图4为椅背上电磁铁单元电路图;
图5为座椅护翼上电磁铁单元电路图;
上述图中的标记均为:1、驾驶员;2、驾驶舱;3、视景子系统;4、座椅;5、运动子系统;6、上衣;7、永磁体;8、护翼;9、椅背;10、电磁铁单元;11、开关;12、电源;13、可调电阻。
具体实施方式
下面对照附图,通过对实施例的描述,本发明的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理、制造工艺及操作使用方法等,作进一步详细的说明,以帮助本领域技术人员对本发明的发明构思、技术方案有更完整、准确和深入的理解。
驾驶模拟系统设有座椅4,座椅4固定在驾驶舱2内,驾驶舱2的底部固定在运动子系统5上,运动子系统5可以根据模拟路况控制驾驶舱2运动,给予更加良好的模拟体验,同时座椅4的前部和两侧设有视景子系统3,用于播放模拟图像,优选视景子系统3为弧形屏幕,总控制器连接并输出控制信号至弧形屏幕和运动子系统5,用于协调整个驾驶模拟系统工作。
系统配有供驾驶员1穿着的上衣6,上衣6中均布永磁铁块,为了便于受力均匀,上衣6背面和两侧均设有永磁体7,并且要求上衣6表面的永磁体7朝向外侧的磁极相同,这样能够同时产生吸引力或者排斥力,吸引力或者排斥力由座椅4产生,座椅4的后侧设有椅背9,两侧设有护翼8,在椅背9和护翼8内均固定电磁铁单元10。
如图4、5所示,电磁铁单元10由串联的电磁铁、开关11、电源12、可调电阻13构成,其中椅背9上的电磁铁单元10由两个电极相反的电源12并联后串联在电磁铁单元10的电路内,该电磁铁单元10的开关11设有三个选择性的档位,分别是空挡断路,以及连接两个不同电源12的档位,这样可以通过接入的不同的电源12,让椅背9向上衣6提供吸引力或者排斥力,独立电路中,可通过开关11来确定哪个电源12给供电,当其中一个电压供电时,面朝座椅4 前方的方向为南极,面朝座椅4后方为北极,而另一个电源12供电时,则相反,当选择空挡时则不产生相互作用的力,此时为匀速驾驶状态或者停车状态。
两侧护翼8内的电磁铁单元10通过串联的可调电阻13、电磁铁并联接入电磁铁单元10,同侧护翼8内的电磁铁绕线方向相同,两侧护翼8电磁铁的绕线方向相同。这样当通电后,同侧护翼8内的电磁铁对上衣6产生相同的力,而另一侧电磁铁对上衣6产生相反的力,两侧护翼8的电磁铁共同作用,模拟驾驶转向的状态。
为了保证受力均衡,在椅背9和护翼8内的电磁铁单元10均设有多个电磁铁,电磁铁均匀的布置在椅背9和护翼8内,并且由总控制器连接并输出控制信号至电磁铁单元10。系统工作时,总控制器驱动运动子系统5和视景子系统 3工作;
上述电磁铁单元可在系统需要让人体产生向左加速度的时候,护翼电磁铁开始供电,调低该电路中的可调电阻阻值,增加所串联电磁铁的电流,这样电磁铁的南极和上衣的南极相互排斥,此时调高另一侧护翼可调电阻阻值,让所串联的电磁铁不产生磁场,此时人体在产出磁力电磁铁的排斥作用下就会向左运动,运动加速度和电磁铁内部通过的电流大小存在按照电磁理论的对应关系。同理,反之可与产生另一侧的作用力。
当需要人体产生向前运动的时候,则通过开启椅背开关,让其中一个电源供电的时候,或产生吸引力或产生排斥力,从而推动人体向后或者向前运动,同时调节可调电阻的阻值,控制电流大小,这样运动加速度和电磁铁内部通过的电流大小存在按照电磁理论的对应关系。
当运动存在前向加速度时控制椅背9的电磁铁单元10向上衣6提供排斥力;
当运动存在后向加速度时控制椅背9的电磁铁单元10向上衣6提供吸引力;
当运动存在左向加速度时控制左侧护翼8的电磁铁单元10向上衣6提供吸引力,右侧护翼8的电磁铁单元10向上衣6提供排斥力;
当运动存在右向加速度时控制左侧护翼8的电磁铁单元10向上衣6提供排斥力,右侧护翼8的电磁铁单元10向上衣6提供吸引力。
上述控制方法可以利用总控制器对开关11的状态进行控制,此外,总控制器驱动可调电阻13工作,从而调节电磁铁上产生的电磁力,根据当前加速度的大小控制相应电磁铁的吸引力或排斥力,一般是产生的磁力大则可调电阻13阻值变小,产生的磁力小则可调电阻13阻值变大,让系统不仅能够产生不同方向上的受力,而且能够根据模拟的状态,控制受力的大小,这样就可以通过控制电路的开关和电流,实现人体在自动驾驶模拟器上产生对应的加速度,提升体感模拟的精确度,对于测试的驾驶假人适用性更佳。
上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
- 一种用于无人驾驶车辆的实时通信控制方法
- 一种基于驾驶风格的线控转向系统传动比控制方法
- 一种无人驾驶方程式赛车通用转向系统及控制方法
- 一种新能源汽车驾驶数据上下电存储系统及控制方法
- 一种基于舒适度的自动驾驶车速控制方法
- 一种车辆驾驶模拟系统及控制方法
- 驾驶模拟系统的控制方法、装置及存储介质、计算机设备