一种基于自动驾驶多核异构冗余高速车载通信的L4L3域控制器平台
文献发布时间:2023-06-19 18:30:43
技术领域
本发明属于自动驾驶技术领域,具体涉及一种基于自动驾驶多核异构冗余高速车载通信的L4L3域控制器平台。
背景技术
随着自动驾驶技术的飞速发展,L2+已经满足不了人们对自动驾驶功能的要求。本发明主要针对L4/L3多核异构自动驾驶域控制器系统,并且用以太网SGMII/RGMII 等接口对PCIE 互相构成高速车载通信冗余。当多核异构的系统需要高速通信的时候,PCIe3.0接口可以提供8Gbps的高速有效通信。当PCIe通信失效的时候,车载级的千兆以太网SWITH提供了另一个高速冗余通道。
目前乘用车和商用车的L2+自动驾驶常规方案:
1. 使用TDA4VM+MCU芯片实现自动泊车或者单目前视;
2. 在1的基础上增加地平线J3等芯片实现单目前视+环视;
方案1的缺点是,平台算力只有8TOPS,只能实现4路环视和自主泊车或远程泊车,或者单目前视。
方案2的缺点是,只能实现单目前视加四路环视。由于AI算力限制无法应用到L3及以上的高价自动驾驶域控制器平台。
发明内容
本发明所要解决的技术问题是,克服现有技术的缺点,提供一种基于自动驾驶多核异构冗余高速车载通信的L4L3域控制器平台,通过多核异构的新型系统平台架构实现高AI算力,通过车载以太网SWITCH1和SWITH2实现处理器之间的高速通信,通过PCIe总线实现多个处理器之间的高速通信。
为了解决以上技术问题,本发明提供一种基于自动驾驶多核异构冗余高速车载通信的L4L3域控制器平台,包括第一SOC1、第二SOC2、第三SOC3、第四SOC4;第一SOC1、第二SOC2、第三SOC3和第四SOC4分别于MCU通讯连接;
第一SOC1、第二SOC2和第三SOC3,用于处理周视的视觉感知和视觉定位;
第四SOC4,用于处理环视视觉感知;
第一以太网SW1和第二以太网SW2构成多路千兆以太网SWICH,
多路千兆以太网SWICH,具备12路百兆车载以太网100BASE-T1,用于传输外部的4D毫米波雷达点云数据;具备8路千兆车载以太网1000BAST-T1用于传输外部的激光雷达点云数据,并且用于和IBOX,以及其他的自动驾驶域控制器通信连接;具备四路RGMII, 用于第一SOC1,第二SOC2,第三SOC3,第四SOC4和MCU 之间高速通信。
本发明进一步限定的技术方案是:第一SOC1连接两路摄像头,第二SOC2连接四路摄像头,第三SOC3连接一路摄像头,第四SOC4连接六路摄像头,14路的摄像头输入实现视觉感知和激光雷达感知的融合。
进一步的,多路千兆以太网SWICH中多余的SGMII 用于扩展工业以太网用于调试或者转换为RGMII连接MCU的RGMII接口。
进一步的,第一SOC1,第二SOC2,第三SOC3和第四SOC4之间通过PCIe总线实现多核之间的高速通信;当多个SOC之间的以太网通信失效时,PCIe通信构成冗余。
进一步的,PCIe总线用于冗余备份,PCIe的通信可以使用芯片自带的Pcie接口或通过PCIE SWITH构成可扩展的高速通信链路。
进一步的,第一SOC1、第二SOC2、第三SOC3和第四SOC4采用A1000芯片,A1000芯片的AI算力为53TOPS,最高可达212TOPSAI算力。
本发明的有益效果是:
通过多核异构的新型系统平台架构实现高AI算力,本发明例采用4个黑芝麻A1000,每个A1000的AI算力为53TOPS,最高可大212TOPSAI算力;符合大多数L3或者L4自动驾驶域控制器的算力需求;
可以实现12至14路的周视和环视摄像头感知输入,最多8路激光雷达点云输入,最多12路4D毫米波雷达点云输入。
通过车载以太网SWITCH1和SWITH2实现处理器之间的高速通信,并且可以接收高分辨率激光雷达和毫米波雷达点云数据;
通过PCIe总线可以实现多个处理器之间的高速通信,以实现视觉感知和激光雷达感知的前融合,并且对以太网通信构成冗余备份;
特别的,SOC之间的PCIe通信也可以通过PCIe switch实现。
附图说明
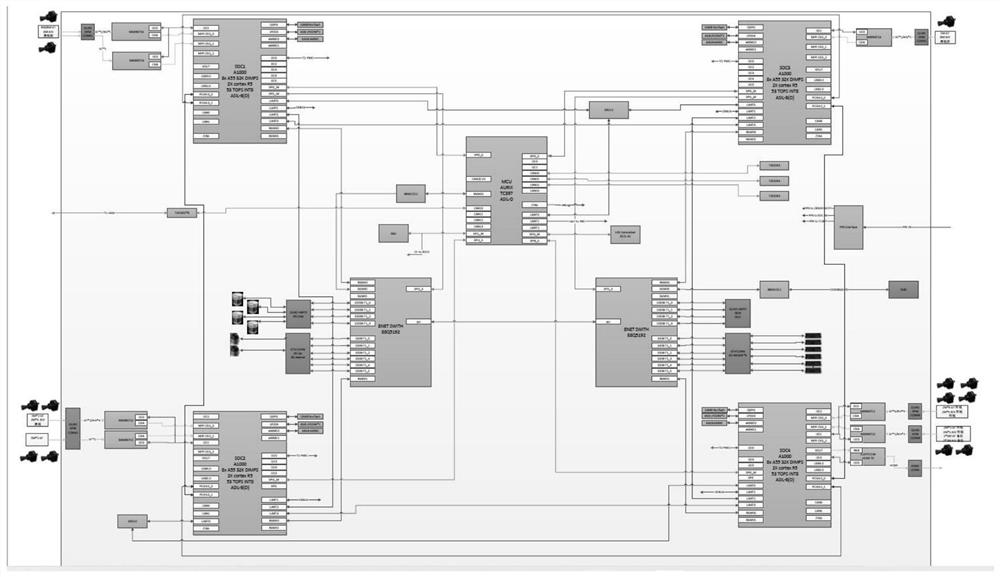
图1为本发明的结构应用框架示意图。
具体实施方式
实施例1
请参阅图1,本实施例提供一种基于自动驾驶多核异构冗余高速车载通信的L4L3域控制器平台,包括第一SOC1、第二SOC2、第三SOC3、第四SOC4;第一SOC1、第二SOC2、第三SOC3和第四SOC4分别于MCU通讯连接;
第一SOC1、第二SOC2和第三SOC3,用于处理周视的视觉感知和视觉定位;
第四SOC4,用于处理环视视觉感知;
第一以太网SW1和第二以太网SW2构成多路千兆以太网SWICH,
多路千兆以太网SWICH,具备12路百兆车载以太网100BASE-T1,用于传输外部的4D毫米波雷达点云数据;具备8路千兆车载以太网1000BAST-T1用于传输外部的激光雷达点云数据,并且用于和IBOX,以及其他的自动驾驶域控制器通信连接;具备四路RGMII, 用于第一SOC1,第二SOC2,第三SOC3,第四SOC4和MCU 之间高速通信。
第一SOC1连接两路摄像头,第二SOC2连接四路摄像头,第三SOC3连接一路摄像头,第四SOC4连接六路摄像头,14路的摄像头输入实现视觉感知和激光雷达感知的融合。
多路千兆以太网SWICH中多余的SGMII 用于扩展工业以太网用于调试或者转换为RGMII连接MCU的RGMII接口。
第一SOC1,第二SOC2,第三SOC3和第四SOC4之间通过PCIe总线实现多核之间的高速通信;当多个SOC之间的以太网通信失效时,PCIe通信构成冗余。
PCIe总线用于冗余备份,PCIe的通信可以使用芯片自带的Pcie接口或通过PCIESWITH构成可扩展的高速通信链路。
第一SOC1、第二SOC2、第三SOC3和第四SOC4采用A1000芯片,A1000芯片的AI算力为53TOPS,最高可达212TOPSAI算力。
当以太网SWITH1和SWITH2 失效的时候,PCIe总线可以起到冗余备份的作用。PCIe的通信除了使用芯片自带的Pcie接口外,还可以通过PCIE SWITH构成更为可扩展的高速通信链路,而且能避免单一节点失效的时候带来的通信问题。
平台系统中第一SOC1、第二SOC2、第三SOC3分别处理周视的视觉感知和视觉定位。第四SOC4处理环视视觉感知。激光雷达的感知、定位可以视算力消耗的情况灵活部署到合适的SOC。MCU处理规划控制,并处理6个毫米波雷达的目标数据。
以太网SW1和以太网SW2共同构成多路的千兆以太网SWICH。具备12路百兆车载以太网100BASE-T1,用于传输外部的4D毫米波雷达点云数据。具备8路的千兆车载以太网1000BAST-T1用于传输外部的激光雷达点云数据,并且用于和IBOX,以及其他的自动驾驶域控制器通信。具备四路RGMII, 可以用于SOC1,SOC2,SOC3,SOC4,MCU 之间高速通信,多余的SGMII 用于扩展工业以太网用于调试或者连接MCU的RGMII接口(需要SGMII转换为RGMII)。特别的,SOC1,SOC2,SOC3,SOC4之间通过PCIe总线实现多核之间的高速通信,增加了系统的可靠性。当多个SOC之间的以太网通信失效的时候,PICE通信构成冗余备份;反之亦然。
每个黑芝麻A1000的算力高达53TOPS,外接摄像头可以扩展至12到14路。
12路至14路的摄像头输入可以构成一定的视觉冗余,其中SOC1支持两路的前视摄像头,当其中一个摄像头失效的时候,另外一路摄像头可以起到部分的冗余的效果。当两路摄像头都失效的时候,前视激光雷达的点云数据可以构成部分的冗余。
通过最多14路的摄像头输入实现视觉感知和激光雷达感知的融合,可以实现高可靠的感知结果输出。另外4D毫米波雷达对近距离的感知有部分冗余的效果。
除上述实施例外,本发明还可以有其他实施方式。凡采用等同替换或等效变换形成的技术方案,均落在本发明要求的保护范围。
- 一种异构多核平台的数据处理系统及终端设备
- 一种多核异构域控制器核间安全通信系统
- 基于区域控制器的车辆环网通信冗余网络架构及通信方法