用于测量快速时变信号的光学相位追踪系统
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及光学相位追踪技术,尤其涉及一种用于测量快速时变信号的光学相位追踪系统。
背景技术
光学相位估计是相干光通信、光频计量和地基或天基引力波观测等高精度测量的主要工具之一。在高精度测量领域,对于许多未知的物理量的测量都可以转化成光学相位差测量,从而使得光学干涉仪成为精密测量中较为常见的设备装置,在工程实践以及科学研究中发挥着至关重要的作用。光学相位测量的极限是由量子力学中海森堡不确定原理决定的,该领域的目标就是完成逼近标准量子极限的测量甚至超出标准量子极限的测量。
以往的相位估计实验都是追踪一个变化速率相对较慢的信号,然而现实中有很多快速信号捕获需求,比如飞行器轨迹精跟踪、高速摄影等。这里的信号变化快慢主要是相对相位锁相环(Phase Locked Loop,PLL)而言的,当信号变化速率过快,超过锁相环响应时间则其无法正常工作。例如,在监控现实中汽车运动或动物运动时,想达到量子限制下的极限精度,需要锁相环能够一直将信号光的相位与本地光的相位锁定在π/2的位置上。当目标物体运动过快导致相位失配时,就无法追踪快速变化的目标物体,导致信号估计精度下降。
发明内容
发明目的:本发明针对现有技术存在的问题,提供一种信号估计精度更高的用于测量快速时变信号的光学相位追踪系统。
技术方案:本发明所述的用于测量快速时变信号的光学相位追踪系统包括第一激光器、第一信号发生器、第一相位调制器、第一分光片、第一平衡探测器、第二相位调制器、第二激光器、第二分光片、第三相位调制器、第二平衡探测器、额外光程和相位测量模块,其中,所述第一相位调制器将所述信号发生器产生的随机信号加载至所述第一激光器发射的激光中,形成调制光束,所述第一分光片将所述调制光束分为第一调制光束和第二调制光束,所述第二分光片将所述第二激光器发射的激光分为第一激光束和第二激光束,所述第二相位调制器将所述相位测量模块反馈的相位信号加载至所述第一激光束中,形成的第三调制光束与所述第一调制光束相干后由所述第一平衡探测器接收,所述相位测量模块根据第一平衡探测器接收的信号估计产生干涉相位差信号所需的估计相位信号,所述第三相位调制器将所述相位测量模块反馈的相位信号加载至所述第二激光束中,形成第四调制光束,所述第二调制光束经额外光程后与所述第四调制光束相干后由所述第二平衡探测器接收。
进一步的,所述相位测量模块具体包括依次连接的鉴相器、卡尔曼滤波器和伺服器,所述鉴相器测量第三调制光束与第一调制光束的干涉相位差信号,所述卡尔曼滤波器对干涉相位差信号行滤波,所述伺服器用于根据滤波信号产生所需的估计相位信号。
进一步的,所述第一信号发生器用于产生速度为10
进一步的,所述第一平衡探测器由两个增益响应相同的光电二级管构成,用于根据每个光电二级管接收的光功率进行光电流相减后输出。
进一步的,所述第二激光器光频和所述第一激光器光频一致。
进一步的,所述额外光程的长度等于第一调制光束经第一平衡探测器、信号测量模块、信号调制器的传播光程。
进一步的,所述第二平衡探测器与第一平衡探测器探测性能一致。
有益效果:本发明与现有技术相比,其显著优点是:本发明可以实现快速变化的目标物体追踪,信号估计精度较高。
附图说明
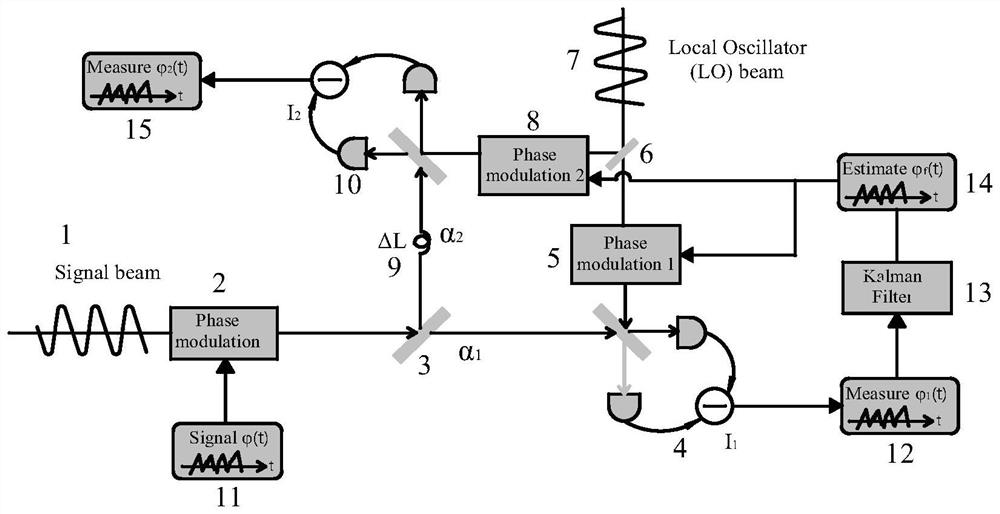
图1是本发明的系统框图;
图2零差探测和时延探测的测量随着工作点偏离的精度比较图;
图3是不同偏离角度下的测量方差随光子数比例变化的示意图;
图4是生成的随机位移图;
图5是测量直接锁相反馈和加滤波后反馈的精度比较;
图6是经典直接探测测量、延迟探测测量和卡尔曼滤波测量结果对比图。
具体实施方式
本实施例提供了一种用于追踪快速时变信号的光学相位追踪系统,如图1所示,包括第一激光器1、第一相位调制器2、第一分光片3、第一平衡探测器4、第二相位调制器5、第二分光片6、第二激光器7、第三相位调制器8、额外光程9、第二平衡探测器10、第一信号发生器11和相位测量模块,相位测量模块具体包括依次连接的鉴相器12、卡尔曼滤波器13和伺服器14。第一激光器1和第二激光器7激光频率一致,第一平衡探测器4和第二平衡探测器10的性能一致。
其中,第一激光器1输出自由空间型连续波窄线宽激光,第一信号发生器11提供速度为10
第一平衡探测器4、鉴相器12、卡尔曼滤波器13和伺服器14、第二相位调制器5共同组成光学锁相环,用于时变随机相位的跟踪测量。第二相位调制器5是锁相环的执行器件,其根据光学锁相环反馈的信号,调整第二激光的相位,将干涉仪两臂相位差锁定至π/2。其中,第二激光器7发射的激光经过第二分光片6分为第一激光束和第二激光束,第一激光束进入光学锁相环,第二激光束进入第三相位调制器8,两次平衡探测器测量用相同的本地光源有利于系统的稳定。第二相位调制器5将伺服器14反馈的相位信号加载至第一激光束中,形成第三调制光束,第三调制光束与第一调制光束相干后由第一平衡探测器4接收,鉴相器12测量第三调制光束与第一调制光束的干涉相位差信号,卡尔曼滤波器13对干涉相位差信号行滤波,伺服器14用于根据滤波信号产生所需的估计相位信号。第三相位调制器8将伺服器14反馈的相位信号加载至所述第二激光束中,形成第四调制光束,第二调制光束经额外光程9后与第四调制光束相干后由所述第二平衡探测器10接收,第三相位调制器8所调制的光可拥有足够高的时空分辨率与第二调制光束相干。
第一平衡探测器4和第二平衡探测器10用于探测激光干涉信号,其由两个增益响应相同的光电二级管构成,根据每个光电二级管接收的光功率进行光电流相减后输出,从而扣除光电系统的共模噪声,提高探测精度。
第一分光片3后的两路调制光束,一路进入光学锁相环,而另一路激光会经过一个额外光程9进入第二平衡探测器10。这里激光经过额外光程9的时间刚好满足光学锁相环反馈时间。由于第一平衡探测器4进行了第一次测量,预先知道了信号相位,经过额外光程9后的激光与经过第三相位调制器8后的激光在第二平衡探测器10处被测量,基本可以默认为始终处于π/2相位差的最优测量点。由于光学锁相环的带宽受限于鉴相器,在本案例中第一平衡探测器4、第二平衡探测器10、相位调制器2、第三相位调制器8的带宽相对较宽,所以经过第三相位调制器8后激光拥有相对较高的时空分辨率,满足高采样需求。
下面对本实施例的系统进行分析和验证。
首先分析了在光子数相同且满足|α|
本实施例还分析了不同分光比对整个系统的影响,如图3所示。图中分别显示了在偏离30度、45度和60度的情况下,随着第一次测量占有的光子数降低,测量误差会逐渐趋近经典量子极限的理论精度。
本实施例采用离散信号进行仿真,设置了光电探测器和锁相环的带宽。这里设定光电探测器的带宽1GHz,第二相位调制器5的带宽为40MHz,第三相位调制器8的带宽为1GHz,光学锁相环的反馈延迟为25ns。图4是生成的随机位移图。工作阶段的速度大约在10
这里,利用卡尔曼滤波器估计锁相环的反馈部分并证明卡尔曼滤波器在相位追踪下的优势,如图5所示。在使用卡尔曼滤波器后,测量的误差波动减小,其中总光子通量|α|
最后,本实施例仿真并比较了时间延迟结构的光学相位追踪系统和传统的光学相位追踪系统的性能。如图6所示,当跟踪信号速度约10
以上所揭露的仅为本发明一种较佳实施例,不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
- 用于接收器内数字相位调变信号的参考相位追踪方法和装置
- 用于接收器内数字相位调变信号的参考相位追踪方法和装置