试验装置及试验方法
文献发布时间:2023-06-19 18:35:48
技术领域
本发明涉及一种使用OTA(Over The Air:空中下载)环境的电波暗箱测量被试验对象的发送特性或接收特性的试验装置及试验方法。
背景技术
近几年,伴随多媒体的发展,大量生产安装有蜂窝、无线LAN等无线通信用天线的无线终端(智能手机等)。今后,尤其要求收发与使用毫米波带的宽频带信号的IEEE802.11ad或5G蜂窝等对应的无线信号的无线终端。
在无线终端的设计开发公司或其制造工厂中,对无线终端所具备的无线通信天线,测量按每个通信标准设定的发送电波的输出电平及接收灵敏度,并进行判定这些RF(Radio Frequency:射频)特性是否满足规定的基准的性能试验。并且,在性能试验中,还进行RRM(Radio Resource Management:无线资源管理)特性的测量。RRM特性的测量为了确认基站与无线终端之间的无线资源控制例如相邻基站之间的切换等是否正常进行动作而进行。
伴随4G或从4G演进向5G的换代而上述性能试验的试验方法也正在发生变化。例如,在将5G NR(New Radio:新无线)系统用无线终端设为被试验对象(Device Under Test:DUT)的性能试验中,4G或4G演进等的试验中主流的有线连接DUT的天线端子与试验装置的方法因如下理由无法使用,即,由在高频电路中安装天线端子引起的特性劣化或从空间方面、成本方面考虑,阵列天线的元件数量较多且将天线端子安装于所有元件并不现实等。因此,将DUT与试验用天线一同容纳于不受周围电波环境影响的电波暗箱中,并通过无线通信进行从试验用天线对DUT的试验信号的发送及来自接收了试验信号的DUT的被测量信号的由试验用天线的接收,进行所谓的OTA试验(例如,参考专利文献1)。
在OTA试验中,因配置于电波暗箱内的试验用天线,例如形成球形的空白区(quietzone),DUT配置于空白区内。在此,空白区是指,在构成OTA试验环境的电波暗箱中,表示从试验用天线以大致均匀的振幅及相位的电波来照射DUT的空间区域的范围的概念(例如,参考非专利文献1)。通过在这种空白区配置DUT,能够在抑制了来自周围的散射波的影响的状态下进行OTA试验。
专利文献1:日本特开2020-085784号公报
非专利文献1:3GPP TR 38.810
图16是拆除测量DUT的RRM特性的以往的试验装置的电波暗箱的顶板而从上方观察的俯视图。
在以往的试验装置中,具备经由反射器207与DUT100收发电波的反射器反射型试验用天线206a及与DUT100收发电波的试验用天线206b、206c、206d、206e、206f。5个试验用天线206b、……、206f在DUT100的配置位置(原点O)上配置成以来自反射器反射型试验用天线206a的电波到来方向为基准形成彼此不同的5个到来角度(30°、60°、90°、120°、150°)。在试验中使用从试验用天线206a,……、206f选择的2个试验用天线,关于不同的多个到来角度测量RRM特性等的收发特性。然而,若试验用天线的数量较多,则装置成本或设置成本变高,因此希望减少试验用天线的个数。
发明内容
本发明是为了解决这种以往的课题而完成的,其目的在于提供一种能够以较少的天线数量来实施对被试验对象的RRM特性等收发特性的远场测量的试验装置及试验方法。
为了解决上述课题,本发明所涉及的试验装置测量具有被试验天线(110)的被试验对象(100)的发送特性或接收特性,所述试验装置(1)为如下结构,即,具备:电波暗箱(50),具有不受周围电波环境影响的内部空间;姿势可变机构(56),依次改变所述内部空间的配置于空白区(QZ)内的所述被试验对象的姿势;第1试验用天线(6a)及第2试验用天线(6b),容纳于所述内部空间,并且在与所述被试验天线之间发送或接收用于测量所述被试验对象的发送特性或接收特性的无线信号;反射器(7),反射所述第1试验用天线所发射的无线信号并转换为平面波的无线信号;及天线可动机构(60),以能够以来自所述第1试验用天线的电波到来方向或对所述第1试验用天线的电波发射方向为基准对设置于远场的所述被试验对象以多个到来角度或多个发射角度来发送或接收无线信号的方式,使所述第2试验用天线的位置移动。
如上所述,本实施方式所涉及的试验装置具备以能够以来自第1试验用天线的电波到来方向或对所述第1试验用天线的电波发射方向为基准对设置于远场的被试验对象以多个到来角度或多个发射角度来发送或接收无线信号的方式使第2试验用天线的位置移动的天线可动机构。根据该结构,在对被试验对象的RRM特性等收发特性的远场测量中,无需根据进行试验的到来角度的数量设置试验用天线,从而能够减少天线数量。由此,能够降低天线等设备成本及安装工作成本。
并且,在本发明所涉及的试验装置中,可以是如下结构,即,所述天线可动机构具备保持所述第2试验用天线的天线保持部(600)及使所述天线保持部在圆上移动的移动机构(700)。
根据该结构,本发明所涉及的试验装置除了能够减少天线数量以外,即便到来角度不同也能够使第2试验用天线与被试验对象之间的距离始终恒定。
并且,在本发明所涉及的试验装置中,可以是如下结构,即,所述天线保持部具有保持所述第2试验用天线的柱状的支柱(61),所述支柱以安装于所述移动机构的一端部比另一端部更靠所述圆的中心轴侧的方式相对于铅垂方向倾斜。
根据该结构,本发明所涉及的试验装置能够缩小天线可动机构的占有(设置)面积及占有空间(体积),从而能够有效地使用电波暗箱的有限的内部空间。
并且,在本发明所涉及的试验装置中,可以是如下结构,即,还具备反射镜(9),反射从所述第2试验用天线发射的无线信号并发送至所述被试验天线,并且反射从所述被试验天线发射的无线信号并发送至所述第2试验用天线,所述天线保持部在长度方向上隔着间隔保持所述第2试验用天线及所述反射镜。
根据该结构,本发明所涉及的试验装置能够通过反射镜改变在第2试验用天线与被试验天线之间收发的无线信号的路径,因此即使在电波暗箱的有限的内部空间中也能够确保远场测量所需的天线之间距离。
并且,在本发明所涉及的试验装置中,可以是如下结构,即,所述移动机构具备使移动台(72)直线移动的直线运动部(701)、圆弧状导轨(76)、所述天线保持部被固定且能够沿所述导轨移动的可动台(77)及连结所述移动台与所述可动台并且通过所述移动台的直线移动使所述可动台沿所述导轨移动的连杆(703),所述连杆以使所述连杆的长度方向相对于所述移动台的移动方向始终正交的方式与所述移动台连结。
根据该结构,本发明所涉及的试验装置在无需以进行试验的到来角度的数量来设置试验用天线而能够减少天线数量的基础上,能够以在规定范围内成为任意的到来角度的方式设置第2试验用天线。而且,在电波暗箱内避开保持有被试验对象的中央的姿势可变机构而能够将天线可动机构设置于周边,从而能够有效地使用电波暗箱的有限的内部空间。
并且,在本发明所涉及的试验装置中,可以是如下结构,即,所述移动机构具备使移动台(72)直线移动的直线运动部(701)、圆弧状导轨(76)、所述天线保持部被固定且能够沿所述导轨移动的可动台(77)及连结所述移动台与所述可动台并且通过所述移动台的直线移动使所述可动台沿所述导轨移动的连杆(703),所述连杆以该连杆的长度方向相对于所述移动台的移动方向所成的角度根据所述移动台的位置而发生变化的方式与所述移动台连结。
根据该结构,本发明所涉及的试验装置能够缩短直线运动部的长度方向的长度,由此,在电波暗箱内避开保持有被试验对象的中央的姿势可变机构而能够有效地使用电波暗箱的有限的内部空间。
并且,在本发明所涉及的试验装置中,可以是如下结构,即,所述移动机构具备在内周面或外周面形成有多个齿的环状或圆弧状的齿条(81)、具有与所述齿条的齿卡合的齿轮并且通过旋转驱动部旋转而沿所述齿条移动的小齿轮(82)及安装于所述小齿轮的可动台(84),所述天线保持部安装于所述可动台。
根据该结构,本发明所涉及的试验装置在电波暗箱内避开保持有被试验对象的中央的姿势可变机构而能够将天线可动机构设置于周边,从而能够有效地使用电波暗箱的有限的内部空间。
并且,在本发明所涉及的试验装置中,可以是如下结构,即,所述移动机构具备在内周面或外周面形成有多个齿的环状或圆弧状的齿条(85)、具有与所述齿条的齿卡合的齿轮并且通过旋转驱动部旋转而使所述齿条旋转移动的小齿轮(86)及安装于所述齿条的可动台(88),所述天线保持部安装于所述可动台。
根据该结构,本发明所涉及的试验装置在电波暗箱内避开保持有被试验对象的中央的姿势可变机构而能够将天线可动机构设置于周边,从而能够有效地使用电波暗箱的有限的内部空间。
并且,本发明所涉及的试验方法使用上述任一个所述的试验装置,该试验方法的特征在于,包括:选择所述多个到来角度中的一个到来角度或发射角度的步骤;以成为所述选择的到来角度或发射角度的方式通过所述天线可动机构使所述第2试验用天线移动的步骤;依次改变配置于所述空白区内的所述被试验对象的姿势的步骤;及当所述被试验对象的姿势每次发生变化时,使用所述第1及第2试验用天线进行所述被试验对象的发送特性或接收特性的测量的步骤。
如上所述,本发明所涉及的试验方法中所使用的试验装置具备以能够以来自第1试验用天线的电波到来方向或对所述第1试验用天线的电波发射方向为基准对设置于远场的被试验对象以多个到来角度或多个发射角度来发送或接收无线信号的方式使第2试验用天线的位置移动的天线可动机构。而且,本试验方法包括以成为所选择的到来角度或发射角度的方式通过天线可动机构使第2试验用天线移动的步骤。由此,能够以较少的天线数量来实施对被试验对象的RRM特性等收发特性的远场测量。通过减少天线数量,能够降低天线等设备成本及安装工作成本。
发明效果
根据本发明,能够提供一种能够以较少的天线数量来实施对被试验对象的RRM特性等收发特性的远场测量的试验装置及试验方法。
附图说明
图1是表示本发明的第1实施方式所涉及的试验装置整体的概略结构的图。
图2是表示本发明的第1实施方式所涉及的试验装置的功能结构的框图。
图3是表示本发明的第1实施方式所涉及的试验装置的综合控制装置的功能结构的框图。
图4是表示本发明的第1实施方式所涉及的试验装置的NR系统模拟器的功能结构的框图。
图5是拆除本发明的第1实施方式所涉及的试验装置的电波暗箱的顶板而从上方观察的俯视图。
图6是拆除电波暗箱的正面侧的侧板而从正面侧观察的主视图。
图7是表示电波暗箱内的试验用天线及反射镜的配置的示意图。
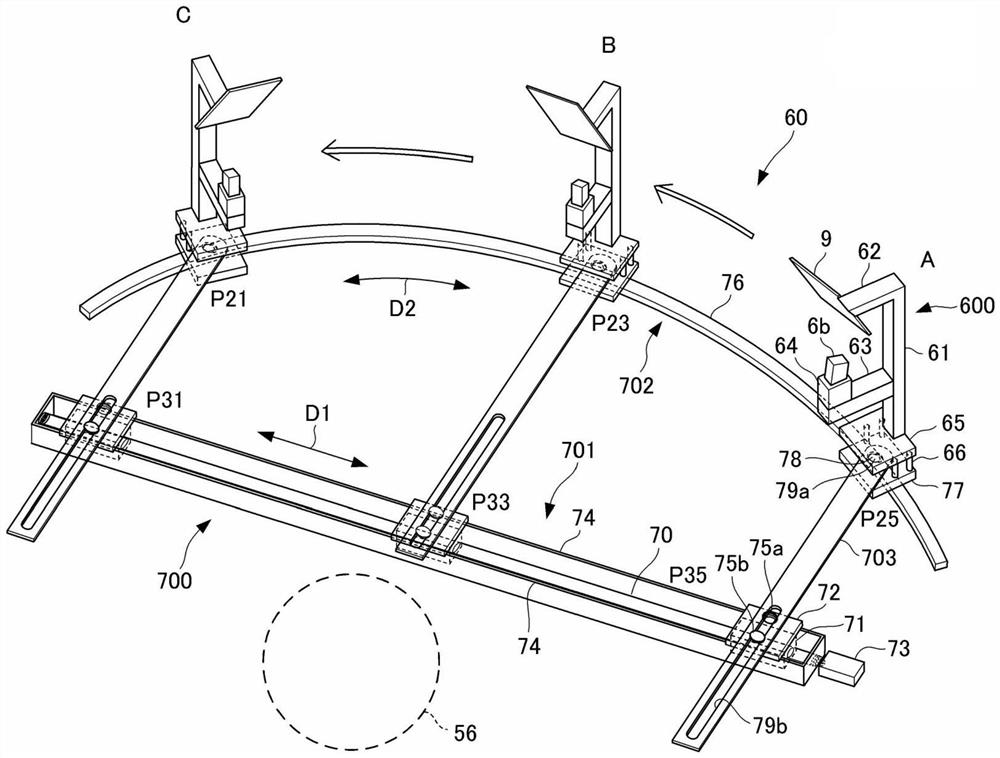
图8是表示第1实施方式所涉及的天线可动机构的结构及动作的图。
图9是表示天线保持部的变形例1的图。
图10是表示保持于变形例1的天线保持部的试验用天线及反射镜的配置的示意图。
图11是表示天线保持部的变形例2的图。
图12是表示使用本发明的第1实施方式所涉及的试验装置而进行的试验方法的概略的流程图。
图13是表示第2实施方式所涉及的天线可动机构的结构及动作的图。
图14是表示第3实施方式所涉及的天线可动机构的概略结构的图。
图15是表示第4实施方式所涉及的天线可动机构的概略结构的图。
图16是拆除以往的试验装置的电波暗箱的顶板而从上方观察的俯视图。
具体实施方式
以下,参考附图对本发明的实施方式所涉及的试验装置及试验方法进行说明。另外,各附图上的各构成要件的尺寸比并不一定与实际尺寸比一致。
(第1实施方式)
第1实施方式所涉及的试验装置1测量具有天线110的DUT100的发送特性或接收特性,例如测量DUT100的RF特性或RRM特性。因此,试验装置1具备电波暗箱50(也称为OTA暗室)、2个试验用天线6a、6b(以下,有时也统称为试验用天线6)、姿势可变机构56、综合控制装置10、NR系统模拟器20及信号处理部40。综合控制装置10、NR系统模拟器20及信号处理部40构成测量装置2。
图1表示试验装置1的外观结构,图2表示试验装置1的功能模块。其中,在图1中示出了从正面透视了电波暗箱50的状态下的各构成要件的配置方式。
如图1及图2所示,电波暗箱50具有不受周围电波环境影响的内部空间51。试验用天线6设置于电波暗箱50的内部空间51,并且在与天线110之间发送或接收用于测量DUT100的发送特性或接收特性的无线信号。姿势可变机构56改变电波暗箱50的内部空间51的配置于空白区QZ内的DUT100的姿势。综合控制装置10、NR系统模拟器20及信号处理部40使用1个或2个试验用天线6对通过姿势可变机构56改变了姿势的DUT100进行DUT100的发送特性或接收特性的测量。
试验装置1例如与具有图1所示的多个机架容纳部90a的机架结构体90一同使用,且以在各机架容纳部90a载置有各构成要件的方式运用。图1表示在机架结构体90的3个机架容纳部90a分别载置有综合控制装置10、NR系统模拟器20及电波暗箱50的例子。以下,对各构成要件进行说明。
(电波暗箱)
电波暗箱50用于无线终端的发送或接收特性的测量,例如实现进行5G用无线终端的性能试验时的OTA试验环境。如图1及图2所示,电波暗箱50例如由具有长方体形状的内部空间51的金属制的框体主体部52构成。电波暗箱50在内部空间51以防止来自外部的电波的侵入及电波向外部发射的状态容纳DUT100及与DUT100的天线110直接或间接地对置的2个试验用天线6。
并且,在电波暗箱50的内面整个区域即框体主体部52的底面52a、侧面52b及上表面52c整个表面粘贴有电波吸收体55,从而确保内部空间51的消声特性,并且电波向外部的发射限制功能得到强化。如此,电波暗箱50形成有不受周围电波环境影响的内部空间51。本实施方式中所使用的电波暗箱50例如为CATR(Compact Antenna Test Range:紧缩天线测试场)方式的消声室(Anechoic Chamber)。
(DUT)
设为被试验对象的DUT100例如为智能手机等无线终端。作为DUT100的通信标准,可举出蜂窝(LTE、LTE-A、W-CDMA(注册商标)、GSM(注册商标)、CDMA2000、1xEV-DO、TD-SCDMA等)、无线LAN(IEEE802.11b/g/a/n/ac/ad等)、Bluetooth(注册商标)、GNSS(GPS、Galileo、GLONASS、BeiDou等)、FM及数字广播(DVB-H、ISDB-T等)。并且,DUT100也可以是收发与5G蜂窝等对应的毫米波带的无线信号的无线终端。
在本实施方式中,DUT100例如为5G NR的无线终端。关于5G NR的无线终端,根据5GNR标准,规定将除了毫米波带以外还包含LTE等中使用的其他频带的既定频带设为可通信频率范围。因此,DUT100的天线110发送或接收DUT100的发送特性或接收特性的被测量对象即既定频带(5G NR波段)的无线信号。天线110例如为Massive-MIMO天线等阵列天线,相当于本发明中的被试验天线。
在本实施方式中,DUT100在电波暗箱50内的与收发特性相关的测量中,经由试验用天线6及根据需要经由反射器7或反射镜9能够收发试验信号及被测量信号。
(姿势可变机构)
接着,对设置于电波暗箱50的内部空间51的姿势可变机构56进行说明。如图1所示,在电波暗箱50的框体主体部52中的内部空间51侧的底面52a(底板)设置有改变配置于空白区QZ内的DUT100的姿势的姿势可变机构56。姿势可变机构56例如为具备围绕2个轴的各轴旋转的旋转机构的双轴定位器。姿势可变机构56构成以设定有试验用天线6的状态使DUT100具有围绕2个轴的旋转自由度进行旋转的OTA试验系统(Combined-axes system:复合轴系统)。具体而言,姿势可变机构56具有驱动部56a、转台56b、支柱56c及作为被试验对象载置部的DUT载置部56d。
驱动部56a由产生旋转驱动力的步进马达等驱动用马达构成,例如设置于底面52a。转台56b通过驱动部56a的旋转驱动力而围绕彼此正交的2个轴中的1个轴旋转规定角度。支柱56c与转台56b连结,从转台56b沿1个轴的方向延伸,并且通过驱动部56a的旋转驱动力与转台56b一同旋转。DUT载置部56d从支柱56c的侧面沿2个轴中的另1个轴的方向延伸,并且通过驱动部56a的旋转驱动力围绕另1个轴旋转规定角度。DUT100载置于DUT载置部56d。
另外,上述的1个轴例如为相对于底面52a沿铅垂方向延伸的轴(图中的Y轴)。并且,上述的另1个轴例如为从支柱56c的侧面沿水平方向延伸的轴。如此构成的姿势可变机构56能够使保持于DUT载置部56d的DUT100以如下方式旋转,例如,以DUT100的中心为旋转中心,以天线110相对于试验用天线6及反射器7朝向三维的所有方向的状态能够依次改变姿势。
在OTA试验系统中,在姿势可变机构56的2个旋转轴的交点即旋转中心(也称为原点O)配置DUT100的中心或天线110的中心。配置DUT100的位置为OTA试验系统的原点O,是配置于电波暗箱50内的DUT100的中心或天线110的中心的位置。即,原点O与通过姿势可变机构56使DUT100围绕2个轴旋转时的不动的旋转中心对应。
(链路天线)
在电波暗箱50中,在框体主体部52的所需位置上分别使用保持件57、59安装有用于在与DUT100之间建立或维持链路(呼叫)的两种链路天线5、8。链路天线5为LTE用链路天线,且在非独立模式(Non-Stand alone mode)下使用。另一方面,链路天线8为5G用链路天线,用于维持5G的呼叫。链路天线5、8以相对于保持于姿势可变机构56的DUT100具有指向性的方式分别由保持件57、59保持。另外,代替使用上述链路天线5、8,也能够将试验用天线6作为链路天线来兼用,因此,以下,以试验用天线6兼作链路天线的功能为例子进行说明。
(近场及远场)
接着,对近场及远场进行说明。将电波从天线直接向DUT100传播的情况称为DFF(Direct Far Field:直接远场)方式,将电波从天线在具有旋转抛物面的反射器7中反射而向DUT100传播的情况称为IFF(Indirect Far Field:间接远场)方式。
将天线设为辐射源的电波具有连结了同相位的点的面(波面)以辐射源为中心以球状扩展的同时传播的性质。在离辐射源近的距离上,波面为弯曲的球面(球面波),但若离辐射源变远,则波面接近平面(平面波)。通常,需要将波面考虑为球面的区域被称为近场(NEAR FIELD),将波面并不视为平面的区域被称为远场(FAR FIELD)。在进行准确的测量的基础上,DUT100与接收球面波相比优选接收平面波。
若要接收平面波,则需要将DUT100设置于远场。当不知DUT100内的天线110的位置及天线尺寸时,远场成为从天线超过2D
在本实施方式中,通过反射器7的旋转抛物面来反射试验用天线6a的电波,并利用使其反射波到达DUT100的位置的方式即CATR方式。根据该方式,能够缩短试验用天线6a与DUT100之间的距离,并且在反射器7的反射镜面上反射后,平面波的区域从笔直的距离扩展,因此能够减少传播损耗。平面波的程度能够用同相位的波的相位差来表示。作为平面波的程度而能够允许的相位差例如为λ/16。相位差例如能够通过矢量网络分析仪(VNA)来进行评价。
(试验用天线)
接着,对试验用天线6进行说明。
图5是拆除本实施方式所涉及的试验装置1的电波暗箱50的顶板而从上方观察的俯视图,图6是拆除电波暗箱50的正面侧的侧板(图6中的下侧的侧板)而从正面侧观察的主视图。
如图5及图6所示,试验用天线6包含作为第1试验用天线的1个反射器反射型试验用天线6a及作为第2试验用天线的1个反射镜反射型试验用天线6b。反射器反射型试验用天线6a经由反射器7在与天线110之间发送或接收用于测量DUT100的发送特性或接收特性的无线信号(以下,也称为测量用无线信号)。反射镜反射型试验用天线6b经由反射镜9在与DUT100所具备的天线110之间发送或接收用于测量DUT100的发送特性或接收特性的无线信号。各试验用天线6具备水平偏振波天线及垂直偏振波天线(参考图2)。
(反射器反射型试验用天线)
首先,对反射器反射型试验用天线6a进行说明。
反射器反射型试验用天线6a与反射器7一同使用,并且作为一次辐射器而发挥功能。作为试验用天线6a,例如能够使用喇叭天线等具有指向性的毫米波用天线。反射器7具有以曲面状弯曲的例如铝制的反射面,反射测量用无线信号的电波,且具有切出了正圆型抛物面的旋转抛物面的一部分的偏置抛物面型结构。如图1所示,反射器7使用反射器保持件58而安装于电波暗箱50的侧面52b的所需位置。
反射器7通过旋转抛物面接收从其旋转抛物面配置于规定的焦点位置上的作为一次辐射器的试验用天线6a发射的试验信号的电波,并且朝向保持于姿势可变机构56的DUT100反射(发送时)。并且,反射器7通过旋转抛物面接收从接收了上述试验信号的DUT100从天线110发射的被测量信号的电波,并且朝向试验用天线6a反射(接收时)。反射器7以能够同时进行这些发送及接收的位置及姿势来配设。即,反射器7通过旋转抛物面反射在试验用天线6a与DUT100的天线110之间收发的无线信号的电波。
根据该结构,能够通过旋转抛物面使从试验用天线6a发射的电波(例如,相对于DUT100的试验信号)沿与该旋转抛物面的轴向平行的方向反射,并且通过该旋转抛物面反射沿与旋转抛物面的轴向平行的方向入射于旋转抛物面的电波(例如,从DUT100发送的被测量信号),并引向试验用天线6a。换言之,反射器7将从试验用天线6a发射的球面波的电波转换为平面波的电波并发送至DUT100,并且使从DUT100发射并入射于反射器7的平面波的电波会聚于试验用天线6a。偏置抛物面与抛物面型相比,不仅可使反射器7自身缩小,而且能够实现镜面垂直接近的配置,因此能够对电波暗箱50的结构进行小型化。
如图6所示,反射器反射型试验用天线6a配置于比通过DUT100的配置位置(原点O)的水平面HP更靠下方的位置。从试验用天线6a发射且由反射器7反射的电波束沿Z轴负方向传播,并且形成所需半径的空白区QZ。
(反射镜反射型试验用天线)
接着,对反射镜反射型试验用天线6b进行说明。
反射镜反射型试验用天线6b经由反射测量用无线信号的电波的平面状的反射镜9在与DUT100的天线110之间发送或接收无线信号。反射镜9例如为铝制,且具有平坦的镜面。从反射镜反射型试验用天线6b发射的电波束在反射镜9上进行镜面反射。
图7是表示电波暗箱50内的反射镜9及反射镜反射型试验用天线6b的配置的示意图。反射镜9及试验用天线6b在由天线保持部600保持的状态下通过天线可动机构(未图示)能够以通过原点O的y轴为中心沿θ方向旋转移动。试验用天线6b配置于比水平面HP更靠下方的位置,反射镜9配置成反射镜面上的电波束的反射点P5位于水平面HP上。从试验用天线6b发射的电波束由反射镜9反射而发送至配置有DUT100的原点O。并且,从DUT100的天线110发射的电波束由反射镜9反射而发送至试验用天线6b。若设为没有反射镜9,则成为在电波暗箱50的外部配置试验用天线6A,从而无法确保远场测量所需的天线之间距离(O-PA之间距离)。通过反射镜9弯曲电波束的传播路径,由此能够将试验用天线6b配置于电波暗箱50内,并且能够确保远场测量所需的天线之间距离。
具体而言,在图7中,将O-P5之间距离和P5-P15之间距离加在一起的距离与远场测量所需的天线之间距离即O-PA之间距离相等。P5表示从试验用天线6b发射的电波束在反射镜9上反射的反射点,P15为试验用天线6b的开口中心,PA为假想试验用天线6A的开口中心。O-P5之间的传播路径位于水平面HP上。另外,从反射器反射型试验用天线6a发射的电波束在反射器7上的反射点P0上反射而发送至配置有DUT100的原点O,P0-O之间的传播路径也位于水平面HP上。
反射器反射型试验用天线6a形成所谓的间接远场(IFF),反射镜反射型试验用天线6b形成直接远场(DFF)。间接远场是指由使用将球面波转换为平面波的反射器的反射型天线形成的远场,直接远场是指由不使用这种反射器的天线直接形成的远场。另外,反射镜反射型试验用天线6b使用反射镜9来反射电波束,但电波束从试验用天线6b行进至远场的距离与没有反射镜的情况相同,因此能够视为DEF型天线。
例如,当已知天线110的天线尺寸D时,使从反射镜反射型试验用天线6b经由所对应的反射镜9至DUT100的天线110的距离大于2D
反射镜反射型试验用天线6b及反射镜9配置于在反射器反射型试验用天线6a的反射器7中反射而通过空白区QZ的电波束的路径外。根据该结构,本实施方式所涉及的试验装置1能够形成良好的空白区QZ。
并且,在本实施方式中,设为反射镜反射型试验用天线6b所形成的空白区与反射器反射型试验用天线6a所形成的空白区QZ相同,但并不限定于此。也可以使反射镜反射型试验用天线6b所形成的空白区与反射器反射型试验用天线6a所形成的空白区QZ不同。例如,若扩展反射器反射型试验用天线6a所形成的空白区QZ,则当单独使用反射器反射型试验用天线6a而测量RF特性等时,能够利用较宽的空白区。
(到来角度)
如图5及图6所示,天线可动机构60使试验用天线6b及反射镜9的位置在各圆上移动,以便能够以来自试验用天线6a的电波到来方向(Z轴负方向)为基准对DUT100以不同的多个到来角度来发送或接收无线信号。多个到来角度例如为30°、60°、90°、120°、150°。如此,能够均匀且无遗漏地测量规定的角度范围内,因此能够以高精度进行DUT100的RRM特性等收发特性的远场测量。由此,例如能够以高精度测量标准3GPP TR38.810V16.2.0(2019-03)中所规定的RRM特性。
在此,“到来角度(AoA(Angle of Arrival))”是指,从试验用天线6来到原点O的电波束或电波束的中心相对于通过配置有DUT100的原点O的特定的直线(例如Z轴)所形成的角度。到来角度能够通过2个试验用天线来规定。在该情况下,将以从1个试验用天线来到原点O的电波束的方向即电波到来方向为基准而从另1个试验用天线来到原点O的电波束或电波束的中心所形成的角度称为“到来角度”或“相对的到来角度”。另外,当从原点O向试验用天线6或其他试验用天线发射时,代替电波到来方向而使用电波发射方向,代替到来角度而使用发射角度“AoD(Angle of Departure)”。
(天线可动机构)
接着,对天线可动机构60进行说明。
天线可动机构60使试验用天线6b的位置在圆上移动,以便能够对以来自试验用天线6a的电波到来方向为基准设置于远场的DUT100以多个到来角度来直接地发送或接收无线信号。因此,天线可动机构60具备天线保持部600及移动机构700。
<天线保持部>
天线保持部600保持试验用天线6b及平面状的反射镜9。试验用天线6b及反射镜9隔着所需间隔保持于天线保持部600。反射镜9反射从试验用天线6b发射的无线信号的电波并发送至DUT100的天线110,并且反射从DUT100的天线110发射的无线信号的电波并发送至试验用天线6b。天线可动机构60使平面状的反射镜9的位置与试验用天线6b一同移动。
根据该结构,能够通过反射镜9改变在试验用天线6b与DUT100的天线110之间收发的无线信号的路径,因此即便是电波暗箱50的有限的狭窄的内部空间51也能够确保远场测量所需的天线之间距离。
如图8所示,天线保持部600具有在长度方向上隔着间隔保持试验用天线6b及反射镜9的细长的棒状或柱状的支柱61。具体而言,在支柱61的一端设置有沿与支柱61的长度方向正交的方向延伸的反射镜安装部62,反射镜9在反射镜安装部62的端部安装成以规定的角度倾斜。并且,在支柱61的长度方向上的中间设置有沿与该长度方向正交的方向延伸的天线安装部63,在天线安装部63的端部安装有角度调整台64,试验用天线6b在角度调整台64上安装成成为规定的角度。支柱61的另一端安装于支承板65的上表面,支承板65通过固定件66从可动台77稍微浮起地固定于可动台77。图8的支柱61构成为支柱61的长度方向成为铅垂方向。
试验用天线6b的角度及反射镜9的角度设定为从试验用天线6b发射的无线信号的电波束由反射镜9的整面反射而发送至DUT100。
可动台77滑动自如地安装于圆弧状导轨76,并且能够向沿以通过设置有DUT100的原点O的铅垂线为旋转轴(y轴)而形成的圆轨道的方向D2移动。即便可动台77位于导轨76的长度方向上的任意位置,可动台77及安装于可动台77的天线保持部600均朝向从试验用天线6b发射的无线信号的电波束由反射镜9反射而向DUT100发送的方向。
在本实施方式中,使用支承板65,但也可以将支柱61的端部直接固定于可动台77。
<天线保持部的变形例1>
图9是表示天线保持部的变形例1的结构的图。如图9所示,变形例1的天线保持部600A的支柱61相对于铅垂方向以角度
如此,在使用了变形例1的天线保持部600A的试验装置1中,能够缩小天线可动机构60的占有(设置)面积及占有空间(体积),从而能够有效地使用电波暗箱50的有限的内部空间51。
图10是表示在使用变形例1的天线保持部600A的试验装置1中电波暗箱50内的反射镜9及反射镜反射型试验用天线6b的配置的示意图。反射镜9及试验用天线6b在由天线保持部600A保持的状态下通过天线可动机构(未图示)能够以通过原点O的y轴为中心向θ方向旋转。从试验用天线6b发射的电波束由反射镜9反射而发送至配置有DUT100的原点O。并且,从DUT100的天线110发射的电波束由反射镜9反射而发送至试验用天线6b。若设为没有反射镜9,则成为在电波暗箱50的外部配置试验用天线6A,从而无法确保远场测量所需的天线之间距离(O-PA之间距离)。通过反射镜9弯曲电波束的传播路径,由此能够将试验用天线6b配置于电波暗箱50内,并且能够确保远场测量所需的天线之间距离。
具体而言,在图10中,将O-P5之间距离和P5-P15之间距离加在一起的距离与远场测量所需的天线之间距离即O-PA之间距离相等。
<天线保持部的变形例2>
图11是表示天线保持部的变形例2的结构的图。如图11所示,与变形例1同样地,天线保持部600B的支柱61相对于铅垂方向以角度
在使用了变形例2的天线保持部600B的试验装置1中,也与变形例1同样地,能够缩小天线可动机构60的占有(设置)面积及占有空间(体积),从而能够有效地使用电波暗箱50的有限的内部空间51。变形例2在即便不使用反射镜也能够确保远场测量所需的天线之间距离的情况下有效。
[<移动机构>
返回到图8,移动机构700具备直线运动部701、圆运动部702及将直线运动转换为圆运动的连杆703。
[<直线运动部>
直线运动部701具备滚珠丝杠70、嵌合于滚珠丝杠70并通过滚珠丝杠70的旋转而直线移动的螺母部71、安装于螺母部71的上部并且与螺母部71一同移动的移动台或移动工作台72、使滚珠丝杠70旋转的马达73及引导移动工作台72的直线移动的直线导轨74。
若滚珠丝杠70通过马达73而旋转,则嵌合于滚珠丝杠70的螺母部71向直线方向D1移动,由此安装于螺母部71的移动工作台72进行直线运动。
在移动工作台72的上表面在与滚珠丝杠70的长度方向正交的方向上隔着间隔立设有2个销75a、75b。
<圆运动部>
圆运动部702具备圆弧状导轨76及跨在导轨76上且能够沿导轨76移动的可动台77。在可动台77的上表面立设有1个销78。
<连杆>
连杆703将直线运动部701的移动工作台72的直线运动转换为圆运动部702的可动台77的圆运动的一部分,并且连结移动工作台72与可动台77。具体而言,连杆703为细长的板状且在一端侧形成有销孔79a,在另一端侧形成有长孔79b。立设于可动台77的销78穿过连杆703的一端侧的销孔79a,连杆703能够以销78为中心回转。2个销75a、75b穿过连杆703的另一端侧的长孔79b,连杆703能够沿2个销75a、75b的排列方向(与直线运动的方向D1正交的方向)移动。即,连杆703的长度方向相对于直线运动部701的移动工作台72的移动方向正交。
通过驱动马达73而滚珠丝杠70旋转,由此安装于螺母部71的移动工作台72进行直线移动,伴随移动工作台72的直线移动,可动台77沿导轨76移动。图8示出了可动台77位于位置P25(A图)而移动工作台72位于直线运动部701的右端的位置P35的情况。在该配置中,以从试验用天线6a来到DUT100的电波束的方向为基准,试验用天线6b例如能够以到来角度150°来发射电波束。
若使直线运动部701的移动工作台72移动至中央位置P33,则圆运动部702的可动台77从动于位置P23(B图)。此时,试验用天线6b例如能够以到来角度90°来发射电波束。同样地,若使移动工作台72移动至左端的位置P31,则可动台77从动于位置P21(C图)。此时,试验用天线6b例如能够以到来角度30°来发射电波束。
通过使移动工作台72的位置移动,例如能够形成30°、60°、90°、120°、150°的到来角度。
根据上述结构,本实施方式所涉及的试验装置1无需以进行试验的到来角度的数量来设置试验用天线,从而能够减少天线数量。并且,能够以在规定范围内形成任意的到来角度的方式移动试验用天线6b。而且,避开保持有DUT100的中央的姿势可变机构56而能够将天线可动机构60设置于周边,天线可动机构60的占有(设置)面积及占有空间(体积)也抑制为较小,从而能够有效地使用电波暗箱50的有限的内部空间51。
在本实施方式中,天线可动机构60配置于电波暗箱50的底板,但配置位置并无限定,也可以配置于顶板,并不限于水平,也可以垂直或倾斜地配置。
接着,参考图2~图4对构成本实施方式所涉及的试验装置1的测量装置2的综合控制装置10、NR系统模拟器20及信号处理部40进行说明。
(综合控制装置)
如以下说明,综合控制装置10集中控制NR系统模拟器20、姿势可变机构56及天线可动机构60。因此,综合控制装置10例如经由以太网(注册商标)等网络19与NR系统模拟器20、姿势可变机构56及天线可动机构60以能够彼此进行通信的方式连接。
图3是表示综合控制装置10的功能结构的框图。如图3所示,综合控制装置10具有控制部11、操作部12及显示部13。控制部11例如由计算机装置构成。如图3所示,该计算机装置例如具有CPU(Central Processing Unit:中央处理器)11a、ROM(Read Only Memory:只读存储器)11b、RAM(Random Access Memory:随机存取存储器)11c、外部接口(I/F)部11d、未图示的SSD(Solid State Drive:固态硬盘)或硬盘驱动器装置等非易失性存储介质及各种输入输出端口。
CPU11a进行将NR系统模拟器20等设为对象的集中控制。ROM11b存储用于启动CPU11a的OS(Operating System:操作系统)或其他程序及控制用参数等。RAM11c存储CPU11a在动作中使用的OS、应用程序的执行代码及数据等。外部接口(I/F)部11d具有输入规定的信号的输入接口功能及输出规定的信号的输出接口功能。
外部I/F部11d经由网络19以能够进行通信的方式与NR系统模拟器20连接。并且,外部I/F部11d经由网络19也与电波暗箱50中的姿势可变机构56或天线可动机构60连接。在输入输出端口连接有操作部12及显示部13。操作部12为用于输入指令等各种信息的功能部,显示部13为显示上述各种信息的输入画面或测量结果等各种信息的功能部。
上述的计算机装置通过CPU11a将RAM11c作为工作区而执行存储于ROM11b的程序而作为控制部11发挥功能。如图3所示,控制部11具有呼叫连接控制部14、信号收发控制部15、DUT姿势控制部17及天线位置控制部18。呼叫连接控制部14、信号收发控制部15、DUT姿势控制部17及天线位置控制部18也通过CPU11a在RAM11c的工作区执行存储于ROM11b的规定的程序来实现。
呼叫连接控制部14通过驱动试验用天线6而在与DUT100之间收发控制信号(无线信号),进行在NR系统模拟器20与DUT100之间建立呼叫(能够收发无线信号的状态)的控制。
信号收发控制部15监视操作部12中的用户操作,以由用户进行DUT100的发送特性及接收特性的测量所涉及的规定的测量开始操作为契机,经呼叫连接控制部14中的呼叫连接控制对NR系统模拟器20发送信号发送指令。而且,信号收发控制部15进行经由试验用天线6对NR系统模拟器20发送试验信号的控制,并且进行对NR系统模拟器20发送信号接收指令且经由试验用天线6接收被测量信号的控制。
并且,信号收发控制部15在使用2个试验用天线6进行的RRM特性等收发特性的试验中,进行到来角度的设定。具体而言,选择规定的多个到来角度(例如,30°、60°、90°、120°、150°)中的1个到来角度而设定为测量条件(存储于RAM11c等)。到来角度可以由用户选择,也可以由控制部11等自动选择。
天线位置控制部18根据所设定的到来角度,控制试验用天线6b的位置。如图5及图6所示,例如,当所设定的到来角度为30°时,以使试验用天线6b移动至位置P11且使反射镜9移动至位置P1的方式进行控制。因此,例如,在ROM11b中预先存储有表示到来角度与试验用天线6b的位置之间的对应关系的到来角度-天线位置对应表18a。到来角度-天线位置对应表18a在执行控制时展开使用于RAM11c的工作区域。另外,到来角度的设定或试验用天线6b的位置的控制可以由NR系统模拟器20的控制部22进行。
DUT姿势控制部17控制测量保持于姿势可变机构56的DUT100时的姿势。为了实现该控制,例如,在ROM11b中预先存储有DUT姿势控制表17a。DUT姿势控制表17a例如当作为驱动部56a采用步进马达时,存储确定该步进马达的旋转驱动的驱动脉冲数(运转脉冲数)作为控制数据。
DUT姿势控制部17以如下方式驱动控制姿势可变机构56,即,将DUT姿势控制表17a展开于RAM11c的工作区,根据该DUT姿势控制表17a,如上所述,以使天线110依次朝向三维的所有方向的方式改变DUT100的姿势。
(NR系统模拟器)
如图4所示,本实施方式所涉及的试验装置1的NR系统模拟器20具有信号测量部21、控制部22、操作部23及显示部24。信号测量部21具有由信号发生部21a、数字/模拟转换器(DAC)21b、调制部21c、RF部21d的发送部21e构成的信号发生功能部及由RF部21d的接收部21f、模拟/数字转换器(ADC)21g及分析处理部21h构成的信号分析功能部。另外,信号测量部21也可以设置2组,以便能够应对所使用的2个试验用天线6a、6b。
在信号测量部21的信号发生功能部中,信号发生部21a生成具有基准波形的波形数据,具体而言,例如生成I分量基带信号及其正交分量信号即Q分量基带信号。DAC21b将从信号发生部21a输出的具有基准波形的波形数据(I分量基带信号及Q分量基带信号)从数字信号转换为模拟信号并输出至调制部21c。调制部21c进行如下调制处理,即,分别对I分量基带信号及Q分量基带信号混合本地信号,并且合成两者而输出数字调制信号。RF部21d由从调制部21c输出的数字调制信号生成与各通信标准的频率对应的试验信号,并通过发送部21e向信号处理部40输出所生成的试验信号。
信号处理部40具备进行在与所使用的1个试验用天线6a之间收发的信号的频率转换等信号处理的第1信号处理部40a及进行在与所使用的另1个试验用天线6b之间收发的信号的频率转换等信号处理的第2信号处理部40b。第1信号处理部40a对发送至所使用的1个试验用天线6a的试验信号实施信号处理而输出至试验用天线6a。第2信号处理部40b对发送至所使用的另1个试验用天线6b的试验信号实施信号处理而输出至试验用天线6b。
并且,在信号测量部21的信号分析功能部中,RF部21d在将从通过天线110接收了上述试验信号的DUT100发送的被测量信号经由信号处理部40由接收部21f接收的基础上,通过将该被测量信号与本地信号进行混合转换为中间频带的信号(IF信号)。ADC21g将通过RF部21d的接收部21f转换为IF信号的被测量信号从模拟信号转换为数字信号并输出至分析处理部21h。
分析处理部21h进行如下处理,即,通过对ADC21g输出的数字信号即被测量信号进行数字处理而生成分别与I分量基带信号及Q分量基带信号对应的波形数据的基础上,根据该波形数据分析I分量基带信号及Q分量基带信号。
分析处理部21h在对DUT100的发送特性(RF特性)的测量中,例如能够测量等价各向同性辐射功率(Equivalent Isotropically Radiated Power:EIRP)、全辐射功率(TotalRadiated Power:TRP)、杂散辐射、调制精度(EVM)、发送功率、星座图及光谱等。并且,分析处理部21h在对DUT100的接收特性(RF特性)的测量中,例如能够测量接收灵敏度、比特误码率(BER)及包出错率(PER)等。在此,EIRP为DUT100的天线110的主波束方向的无线信号强度。并且,TRP为从DUT100的天线110向空间发射的功率的合计值。
关于DUT100的RRM特性,分析处理部21h例如也能够分析从1个试验用天线向另1个试验用天线的切换动作是否正常进行等。
控制部22与上述的综合控制装置10的控制部11同样地,例如由包含CPU、RAM、ROM及各种输入输出接口的计算机装置构成。CPU进行用于实现信号发生功能部、信号分析功能部、操作部23及显示部24的各功能的规定的信息处理及控制。
操作部23及显示部24与上述计算机装置的输入输出接口连接。操作部23为用于输入指令等各种信息的功能部,显示部24为显示上述各种信息的输入画面及测量结果等各种信息的功能部。
在本实施方式中,将综合控制装置10及NR系统模拟器20设为分体装置,但也可以以1个装置来构成。在该情况下,也可以综合综合控制装置10的控制部11与NR系统模拟器20的控制部22并通过1个计算机装置来实现。
(信号处理部)
接着,对信号处理部40进行说明。
信号处理部40设置于NR系统模拟器20与试验用天线6之间,且具备进行在与所使用的1个试验用天线6a之间收发的信号的频率转换等信号处理的第1信号处理部40a及进行在与所使用的另1个试验用天线6b之间收发的信号的频率转换等信号处理的第2信号处理部40b。
第1信号处理部40a具备升频转换器、降频转换器、放大器及频率滤波器等,并且对发送至所使用的1个试验用天线6a的试验信号实施频率转换(上变频)、放大及频率选择等信号处理而输出至试验用天线6a。并且,第1信号处理部40a对从所使用的1个试验用天线6a输入的被测量信号实施频率转换(下变频)、放大及频率选择等信号处理而输出至信号测量部21。
第2信号处理部40b具备升频转换器、降频转换器、放大器及频率滤波器等,并且对发送至所使用的另1个试验用天线6b的试验信号实施频率转换(上变频)、放大及频率选择等信号处理而输出至试验用天线6b。并且,第2信号处理部40b对从所使用的另1个试验用天线6b输入的被测量信号实施频率转换(下变频)、放大及频率选择等信号处理而输出至信号测量部21。
(试验方法)
接着,参考图12的流程图对使用本实施方式所涉及的试验装置1进行的试验方法进行说明。以下,对使用2个试验用天线进行的试验(例如RRM特性等收发特性的测量)进行说明,但这是试验方法的一例,根据试验的种类而具体的试验方法不同是显而易见的。
首先,用户对设置于电波暗箱50的内部空间51内的姿势可变机构56的DUT载置部56d设置试验对象的DUT100(步骤S1)。
接着,用户使用综合控制装置10的操作部12进行命令控制部11开始测量DUT100的发送特性及接收特性的测量开始操作。该测量开始操作也可以由NR系统模拟器20的操作部23进行。
控制部11设定预先设定的到来角度中的1个(步骤S2)。例如,当预先设定的到来角度为30°、60°、90°、120°、150°时,控制部11选择其中的1个到来角度(例如30°),并设定为需测量的到来角度(例如存储于RAM11c)。到来角度的设定也可以由用户进行。
接着,控制部11以成为在步骤S2中设定的到来角度的方式使试验用天线6b的位置移动。例如,以如下方式进行控制,即,当所设定的到来角度为30°时,使试验用天线6b移动至位置P11,使反射镜9移动至位置P1,当到来角度为60°时,使试验用天线6b移动至位置P12,使反射镜9移动至位置P2,当到来角度为90°时,使试验用天线6b移动至位置P13,使反射镜9移动至位置P3,当到来角度为120°时,使试验用天线6b移动至位置P14,使反射镜9移动至位置P4,当到来角度为150°时,使试验用天线6b移动至位置P15,使反射镜9移动至位置P5。
控制部11的呼叫连接控制部14通过使用试验用天线6,并且在与DUT100之间收发控制信号(无线信号),实施呼叫连接控制(步骤S4)。具体而言,NR系统模拟器20经由试验用天线6对DUT100无线发送具有规定频率的控制信号(呼叫连接请求信号)。另一方面,接收了该呼叫连接请求信号的DUT100在设定了请求连接的频率的基础上,回复控制信号(呼叫连接响应信号)。NR系统模拟器20接收该呼叫连接响应信号并确认已正常进行响应。这些一系列处理为呼叫连接控制。通过该呼叫连接控制,在NR系统模拟器20与DUT100之间,建立经由试验用天线6能够收发规定频率的无线信号的状态。
另外,通过DUT100接收从NR系统模拟器20经由试验用天线6发送过来的无线信号的处理被称为下行链路(DL)处理。相反,通过DUT100经由试验用天线6对NR系统模拟器20发送的无线信号的处理被称为上行链路(UL)处理。试验用天线6为了执行建立链路(呼叫)的处理以及建立链路后的下行链路(DL)及上行链路(UL)的处理而使用,并且兼备链路天线的功能。
在建立步骤S4中的呼叫连接之后,综合控制装置10的DUT姿势控制部17通过姿势可变机构56将配置于空白区QZ内的DUT100的姿势控制为规定的姿势(步骤S5)。
在DUT100通过姿势可变机构56控制为规定的姿势之后,综合控制装置10的信号收发控制部15对NR系统模拟器20发送信号发送指令。NR系统模拟器20根据该信号发送指令,经由所选择的试验用天线6向DUT100发送试验信号(步骤S6)。
关于基于NR系统模拟器20的试验信号发送控制,以如下方式实施。
在NR系统模拟器20(参考图4)中,信号发生部21a在接收了上述信号发送指令的控制部22的控制下,产生用于生成试验信号的信号。接着,DAC21b对由信号发生部产生的信号进行数字/模拟转换处理。接着,调制部21c对通过数字/模拟转换而获得的模拟信号进行调制处理。接着,RF部21d从调制信号生成与各通信标准的频率对应的试验信号,发送部21e将该试验信号(DL数据)发送至信号处理部40。
信号处理部40设置于电波暗箱50内或外,进行频率转换(上变频)、放大及频率选择等信号处理,并发送至试验用天线6,试验用天线6向DUT100输出该信号。另外,为了进行2个试验用天线的信号处理,在信号处理部40中能够同时进行多个信号的处理。
另外,信号收发控制部15在步骤S6中开始试验信号发送的控制之后,DUT100的发送特性及接收特性的测量结束为止的期间,以适当的定时发送试验信号的方式进行控制。
另一方面,DUT100以根据在步骤S5中进行的上述姿势控制而依次改变的不同的姿势的状态通过天线110接收经由试验用天线6发送过来的试验信号(DL数据),并且发送相对于该试验信号的响应信号即被测量信号。
在步骤S6中开始试验信号的发送之后,继续在基于信号收发控制部15的控制下进行接收处理(步骤S7)。在该接收处理中,试验用天线6接收从接收了上述试验信号的DUT100发送的被测量信号,并输出至信号处理部40。信号处理部40进行频率转换(下变频)、放大及频率选择等信号处理,并输出至NR系统模拟器20。
NR系统模拟器20执行测量通过信号处理部40进行频率转换的被测量信号的测量处理(步骤S8)。
具体而言,NR系统模拟器20的RF部21d的接收部21f输入通过信号处理部40进行信号处理的被测量信号。RF部21d在控制部22的控制下,将输入于接收部21f的被测量信号转换为更低频率的IF信号。
接着,ADC21g在控制部22的控制下,将IF信号从模拟信号转换为数字信号并输出至分析处理部21h。分析处理部21h生成分别与I分量基带信号及Q分量基带信号对应的波形数据。而且,分析处理部21h在控制部22的控制下,根据所生成的波形数据分析被测量信号。另外,为了进行2个试验用天线的信号处理,信号处理部40能够并列进行多个信号的处理。
更具体而言,在NR系统模拟器20中,分析处理部21h在控制部22的控制下,根据被测量信号的分析结果测量DUT100的发送特性及接收特性。
例如,关于DUT100的发送特性(RF特性),以如下方式进行。首先,NR系统模拟器20在控制部22的控制下,作为试验信号发送上行链路信号发送的请求帧。DUT100响应于该上行链路信号发送的请求帧而将上行链路信号帧作为被测量信号发送至NR系统模拟器20。分析处理部21h根据该上行链路信号帧进行评价DUT100的发送特性的处理。
并且,关于DUT100的接收特性(RF特性),例如以如下方式进行。分析处理部21h在控制部22的控制下,计算从NR系统模拟器20作为试验信号发送的测量用帧的发送次数及对测量用帧从DUT100作为被测量信号发送的ACK及NACK的接收次数的比例作为误码率(PER)。
并且,关于DUT100的RRM特性,例如分析处理部21h也可以在控制部22的控制下,改变DUT100的姿势而对从1个试验用天线向另1个试验用天线的切换动作是否正常进行等进行试验。
在步骤S8中,分析处理部21h在控制部22的控制下,将DUT100的发送特性及接收特性的测量结果存储于未图示的RAM等存储区域。该测量结果也可以显示于显示部24或显示部13。
接着,综合控制装置10的控制部11判定关于所期望的所有姿势是否结束了DUT100的发送特性及接收特性的测量(步骤S9)。在此,当判定为测量尚未结束时(步骤S9中为“否”),返回到步骤S5而继续进行处理。
当判定为对所有姿势结束了测量时(步骤S9中为“是”),控制部11判定对所有到来角度是否结束测量(步骤S10)。
当判定为对所有到来角度尚未结束测量时(步骤S10中为“否”),控制部11返回到步骤S2而继续进行处理。当判定为对所有到来角度结束了测量时(步骤S10中为“是”),控制部11结束试验。
(作用·效果)
如上所述,本实施方式所涉及的试验装置1具备天线可动机构60,该天线可动机构60使试验用天线6b的位置在圆上移动,以便能够以来自试验用天线6a的电波到来方向为基准对设置于远场的DUT100以多个到来角度直接地发送或接收无线信号。根据该结构,在对DUT100的RRM特性等收发特性的远场测量中,无需根据进行试验的到来角度的数量设置试验用天线,从而能够减少天线数量。由此,能够降低天线等设备成本及安装工作成本。
并且,本实施方式所涉及的试验装置1能够通过反射镜9改变在试验用天线6b与DUT100的天线110之间收发的无线信号的路径,因此即使在电波暗箱50的有限的狭窄的内部空间51中也能够确保远场测量所需的天线之间距离。
并且,本实施方式所涉及的试验装置1为天线可动机构60通过连杆703将基于直线运动部701的直线运动转换为圆运动部702的圆运动的结构,因此在电波暗箱50内避开保持有DUT100的中央的姿势可变机构56而能够将天线可动机构60设置于周边,天线可动机构60的占有(设置)面积及占有空间(体积)也较小,从而能够有效地使用电波暗箱50的有限的内部空间51。
(第2实施方式)
接着,对本发明的第2实施方式所涉及的试验装置进行说明。
第2实施方式所涉及的试验装置1在天线可动机构60B中直线运动部701与连杆703连结成角度可变的点上,与以90°固定连结的第1实施方式不同。其他构成要件相同,对相同的构成要件标注相同的符号,并适当省略详细说明。
图13是表示第2实施方式所涉及的天线可动机构60B的结构及动作的概略的图。在图13中,省略了天线保持部600的图示。如图13所示,连杆703以连杆703的长度方向相对于直线运动部701的移动工作台72的直线运动方向所成的角度根据移动工作台72的位置而改变的方式与移动工作台72连结。具体而言,在移动工作台72的上表面立设有1个销75,销75穿过连杆703的长孔79b。由此,连杆703能够以销75为支点进行旋转,并且能够沿长孔79b的长度方向移动与长孔79b的长度量相当的量。
移动工作台72通过马达73的驱动能够沿直线运动部701的滚珠丝杠70及直线导轨74向直线运动的方向D3移动。在安装天线保持部600或600A的可动台77上立设有销78,销78穿过连杆703的销孔79a。由此,通过直线运动部701的移动工作台72向直线运动的方向D3移动,由连杆703连结的可动台77能够沿圆弧状导轨76向圆运动的方向D4移动。即,由直线运动部701驱动的移动工作台72的直线运动通过连杆703转换为可动台77的圆运动。
图13示出了可动台77位于位置P25(A图)而移动工作台72位于位置P45的情况。在该配置中,若在可动台77上安装天线保持部600而在天线保持部600安装试验用天线6b及反射镜9,则试验用天线6b例如能够以从试验用天线6a来到DUT100的电波束的方向为基准以到来角度150°来发射电波束。
若使移动工作台72移动至中央的位置P43,则可动台77从动于位置P23(B图)。此时,试验用天线6b例如能够以到来角度90°来发射电波束。同样地,若使移动工作台72移动至左端的位置P41,则可动台77从动于位置P21(C图)。此时,试验用天线6b例如能够以到来角度30°来发射电波束。
根据上述结构,本实施方式所涉及的试验装置1与第1实施方式相比能够缩短直线运动部701的长度方向的长度,由此,在电波暗箱50内避开保持有DUT100的中央的姿势可变机构56而能够有效地使用电波暗箱50的有限的内部空间51。
在本实施方式中,天线可动机构60B配置于电波暗箱50的底板,但配置位置并不限定于此,也可以配置于顶板,并不限于水平,也可以垂直或倾斜地配置。
(第3实施方式)
接着,对本发明的第3实施方式所涉及的试验装置进行说明。
第3实施方式所涉及的试验装置1在天线可动机构60C中使用齿条·小齿轮来实现圆运动的点上,与将直线运动转换为圆运动的第1及第2实施方式不同。其他构成要件相同,对相同的构成要件标注相同的符号,并适当省略详细说明。
图14是表示第3实施方式所涉及的天线可动机构60C所具有的移动机构800的结构的概略的图。在图14中,省略了天线保持部600的图示。如图14所示,天线可动机构60C具有在外周面形成有多个齿81a的环状的齿条81及与齿条81的齿81a卡合的齿轮82a,且具备通过马达等旋转驱动部(未图示)进行旋转由此沿齿条81向圆运动的方向D5移动的小齿轮82及安装于小齿轮82的可动台84。并且,引导用从动轮83隔着齿条81与小齿轮82对置配置。
在环状的齿条81的中央配置保持DUT100的姿势可变机构56。在可动台84上安装天线保持部600,在天线保持部600安装试验用天线6b及反射镜9。通过马达等旋转驱动部使小齿轮82沿齿条81圆运动并且使其移动至任意的位置,由此试验用天线6b能够以从试验用天线6a来到DUT100的电波束的方向为基准以任意的到来角度来发射电波束。
通过使可动台84的位置移动,例如,能够形成30°、60°、90°、120°、150°的到来角度。
在本实施方式中,天线可动机构60C配置于电波暗箱50的底板,但配置位置并不限定于此,也可以配置于顶板,并不限于水平,也可以垂直或倾斜地配置。并且,在齿条81的外周面形成齿81a,并且将小齿轮82配置于齿条81的外侧,但也可以在齿条81的内周面形成齿,并且将小齿轮82配置于齿条81的内侧。并且,在本实施方式中,齿条81为环状,但也可以设为覆盖能够形成所要求的到来角度的范围的圆弧状。
根据上述结构,本实施方式所涉及的试验装置1在对DUT100的RRM特性等收发特性的远场测量中,无需根据进行试验的到来角度的数量设置试验用天线,从而能够减少天线数量。由此,能够降低天线等设备成本及安装工作成本。并且,本实施方式所涉及的试验装置1在电波暗箱50内避开保持有DUT100的中央的姿势可变机构56而能够将天线可动机构60C设置于周边,从而能够有效地使用电波暗箱50的有限的内部空间51。
(第4实施方式)
接着,对本发明的第4实施方式所涉及的试验装置进行说明。
第4实施方式所涉及的试验装置在天线可动机构60D中使齿条移动(旋转)的点上,与使小齿轮移动(圆运动)的第3实施方式不同。其他构成要件相同,对相同的构成要件标注相同的符号,并适当省略详细说明。
图15是表示第4实施方式所涉及的天线可动机构60D所具有的移动机构800的结构的概略的图。如图15所示,天线可动机构60D具有在内周面形成有多个齿85a的环状的齿条85及与齿条85的齿85a卡合的齿轮86a,且具备通过马达等旋转驱动部(未图示)进行旋转由此使齿条85旋转移动的小齿轮86及安装于齿条85的可动台88。并且,在齿条85的下方设置有滑动自如地支承齿条85且引导旋转运动的引导部87。
在环状的齿条85的中央配置保持DUT100的姿势可变机构56。在可动台88上安装天线保持部600,在天线保持部600安装试验用天线6b及反射镜9。通过马达等旋转驱动部使小齿轮86旋转驱动,由此齿条85从动而使可动台88圆运动并使其移动至任意的位置,由此试验用天线6b能够以从试验用天线6a来到DUT100的电波束的方向为基准以任意的到来角度来发射电波束。
通过使可动台88的位置移动,例如,能够形成30°、60°、90°、120°、150°的到来角度。
在本实施方式中,天线可动机构60D配置于电波暗箱50的底板,但配置位置并不限定于此,也可以配置于顶板,并不限于水平,也可以垂直或倾斜地配置。并且,在齿条85的内周面形成齿85a,并且将小齿轮86配置于齿条85的内侧,但也可以在齿条85的外周面形成齿,并且将小齿轮86配置于齿条85的外侧。并且,在本实施方式中,齿条85为环状,但也可以设为覆盖能够形成所要求的到来角度的范围的圆弧状。
根据上述结构,本实施方式所涉及的试验装置1在对DUT100的RRM特性等收发特性的远场测量中,无需根据进行试验的到来角度的数量设置试验用天线,从而能够减少天线数量。由此,能够降低天线等设备成本及安装工作成本。并且,本实施方式所涉及的试验装置1在电波暗箱50内避开保持有DUT100的中央的姿势可变机构56而能够将天线可动机构60D设置于周边,从而能够有效地使用电波暗箱50的有限的内部空间51。
产业上的可利用性
如上所述,本发明具有能够以较少的天线数量来实施对被试验对象的RRM特性等收发特性的远场测量的效果,并且在所有无线终端的试验装置及试验方法中有效。
符号说明
1-试验装置,2-测量装置,5、8-链路天线,6、6a、6b-试验用天线,7-反射器,9-反射镜,10-综合控制装置,11、22-控制部,11a-CPU,11b-ROM,11c-RAM,11d-外部接口部,12、23-操作部,13、24-显示部,14-呼叫连接控制部,15-信号收发控制部,17-DUT姿势控制部,17a-DUT姿势控制表,18-天线位置控制部,18a-到来角度-天线位置对应表,19-网络,20-NR系统模拟器,21-信号测量部,21a-信号发生部,21b-DAC,21c-调制部,21d-RF部,21e-发送部,21f-接收部,21g-ADC,21h-分析处理部,40-信号处理部,40a-第1信号处理部,40b-第2信号处理部,50-电波暗箱,51-内部空间,52-框体主体部,52a-底面,52b-侧面,52c-上表面,55-电波吸收体,56-姿势可变机构,56a-驱动部,56b-转台,56c-支柱,56d-DUT载置部,57、59-保持件,58-反射器保持件,60-天线可动机构,600-天线保持部,61-支柱,62-反射镜安装部,63-天线安装部,64-角度调整台,65-支承板,66-固定件,700、800-移动机构,701-直线运动部,70-滚珠丝杠,71-螺母部,72-移动工作台(移动台),73-马达,74-直线导轨,75a、75b-销,702-圆运动部,76-导轨,77-可动台,78-销,703-连杆,79a-销孔,79b-长孔,81、85-齿条,82、86-小齿轮,83-从动轮,84、88-可动台,87-引导部,90-机架结构体,90a-机架容纳部,100-DUT(被试验对象),110-天线(被试验天线),QZ-空白区,HP-水平面。
- 用于轮胎条拉拔试验的试验装置及方法
- 船舶倾斜试验装置、船舶及船舶倾斜试验方法
- 一种流动润湿条件下可视化气固冲蚀磨损试验装置及其试验方法
- 一种消除水平环向压力的混凝土抗渗试验装置及试验方法
- 老化试验装置及老化试验用驱动板、老化试验装置及老化试验用驱动板的控制方法
- 弯曲试验装置及使用弯曲试验装置的试验方法