一种耐辐照双摆臂履带式机器人传动装置
文献发布时间:2023-06-19 19:00:17
技术领域
本发明属于机器人技术领域,具体涉及一种耐辐照双摆臂履带式机器人传动装置。
背景技术
核电站内部具有非常复杂的非结构化地形环境,平台之间以大斜度楼梯连接,最大的楼梯单阶梯高度可达280mm,单阶梯深度可达290mm,楼梯斜度接近45°,除此之外,通往各房间的通道多数有阶梯障碍物。
为使机器人能够在该类环境中实现巡检和应急处置,机器人移动底盘需具有较强的越障能力和稳定性,能够避开或者跨越障碍物以及攀爬楼梯等。面对具有较大阶梯高度和深度的楼梯,单摆臂履带机器人无法胜任,双摆臂式履带机器人将发挥优越的越障能力。机器人执行任务时,摆臂展开增加接地面积,后摆臂的增加提供了攀爬楼梯时的后部支撑作用,能有效提高机器人移动平台的综合性能。
考虑到核电站巡检和应急处置的环境特点,包括强辐照和非结构等特点,履带机器人的传动结构和运动结构是克服和适应这类特殊环境的重要环节。其中,传动结构的设计关系到车体内部结构是否紧凑、动力输出性能是否优越、拆装是否方便等问题。
发明内容
本发明的目的在于提供一种耐辐照双摆臂履带式机器人传动装置,解决在辐照环境和非结构地形环境下的越障、爬坡上上下楼梯等,以适应复杂环境下的自动化智能检维修作业的问题。
本发明的技术方案如下:一种耐辐照双摆臂履带式机器人传动装置,该装置包括车体框架组件、主履带驱动组件以及摆臂履带驱动组件,其中,两个所述摆臂履带驱动组件分别设于车体框架组件的前后两端,所述摆臂履带驱动组件中的传动部分集中在左右方向的一侧,并使前后所述的摆臂履带驱动组件中的所述传动部分侧位于所述车体框架组件前后的对角处;所述主履带驱动组件为中空结构,两个所述主履带驱动组件分别同轴设置在两个所述摆臂履带驱动组件中所述传动部分的另一侧;位于车体框架组件同侧的所述主履带驱动组件中的主履带驱动轮与所述摆臂履带驱动轮组件中的主履带从动轮之间设置有主履带。
所述摆臂履带驱动组件中的传动部分包括二级减速部件,其中,第一级减速是大减速比的行星齿轮减速箱结构;第二级减速部件为正齿轮传动机构;通过更换正齿轮传动机构中输入齿轮和输出齿轮,实现输出扭矩的调整。
所述传动部分包括摆臂驱动齿轮、惰轮以及摆臂从动齿轮,其中,所述摆臂驱动齿轮设于摆臂驱动电机的输出轴上,所述摆臂驱动齿轮通过惰轮与所述摆臂从动轮形成齿轮啮合传动结构。
所述摆臂驱动电机通过支座固定在所述车体框架组件内部,所述摆臂从动齿轮中的齿轮盘固定设置在车体框架组件内部左右方向上偏向一侧位置处,并在该侧所述摆臂从动齿轮通过联轴器与左半轴相连接;所述摆臂从动齿轮另一侧为长杆状的右半轴,所述左半轴和右半轴与车体框架组件外部左右两侧设置的摆臂履带组件连接;所述摆臂履带组件最外侧为偏轴结构,通过所述左半轴和右半轴带动所述摆臂履带组件外侧偏轴结构绕偏心轴线转动,实现对车体框架组件1的摆臂运动。
所述摆臂驱动组件中的右半轴上套有主履带驱动组件,所述主履带驱动组件固定在所述车体框架组件内,且并不与右半轴发生干涉;所述主履带驱动组件包括输入轴、无框电机组件、谐波减速器以及输出轴,其中,所述无框电机组件中心轴线上设有中空的输入轴,通过所述无框电机组件转子驱动所述输入轴转动;所述输入轴一端通过法兰与谐波减速器的波发生器端连接,所述谐波减速器的刚轮与所述输出轴相连接,所述输出轴与位于车体框架组件外部及所述摆臂履带组件偏轴结构内侧之间设置的主履带驱动安装座相连接,所述主履带驱动安装座上设有主履带驱动轮,其与所述主履带相啮合。
所述无框电机组件通过压板固定在套筒内部,所述套筒设置在所述车体框架组件内部;所述输入轴上还设有编码器。
所述车体框架组件包括底板、盖板、左侧板以及右侧板,其中,底板、盖板与左侧板、右侧板组成封闭的壳体结构;所述左侧板和右侧板左右两侧前后均开有圆形通孔,所述通孔为所述摆臂履带驱动组件和主履带驱动组件最外侧的输出结构与内部结构提供连接通道;所述车体框架组件采用耐辐照材料制成。
所述车体框架组件上端设有机械臂组件安装机械接口。
所述车体框架组件中设有电池和控制器,利用所述控制器控制主履带驱动组件和摆臂履带驱动组件各自转动,并利用所述电池提供动能进行运行。
所述车体框架组件内壁设有加强筋,满足整体刚度的要求。
本发明的显著效果在于:本发明所述的一种耐辐照双摆臂履带式机器人传动装置具有以下优点:(1)本发明的中的主履带驱动组件采用前后对角布置的结构形式,避免了后驱形式左右轮传动结构集中导致的结构拥挤,且主履带组件具有中空结构,摆臂驱动组件的驱动轴布置于此中空孔中,因此结构很紧凑,节省了车体框架大量的内部空间,便于安装电气元件和走线布置;(2)本发明中的摆臂驱动组件具有二级减速部件,即一级减速采用了大减速比的行星齿轮减速箱,二级减速则采用正齿轮传动机构,使得摆臂驱动具有大的扭矩输出,并且可以通过更换正齿轮传动机构中的输入、输出齿轮来实现不同传动比输出,最终实现摆臂驱动的输出扭矩调整;(3)本发明中摆臂驱动组件中的驱动轴采用左右半轴分体式结构,左右半轴通过选定的具有适宜扭矩输出的联轴器连接成一个整体,并且通过中间的支撑座加以支撑,因而整个组件的刚度较好且安装拆卸方便;(4)主履带驱动采用了无框电机配合谐波减速器的形式,因而可提供大扭矩输出,适应复杂环境下行驶大驱动力矩需求,且电机的编码器采用旋转变压器,使得机器人车体可应用于较强辐射剂量的环境中;(5)移动车体框架组件的内壁开设有加强筋结构,整体的刚度较好。
附图说明
图1为本发明所述的一种耐辐照双摆臂履带式机器人传动装置结构示意图;
图2为本发明所述的一种耐辐照双摆臂履带式机器人传动装置中车体框架组件结构示意图;
图3为本发明所述的一种耐辐照双摆臂履带式机器人传动装置中主履带驱动组件结构示意图;
图4为本发明所述的一种耐辐照双摆臂履带式机器人传动装置中摆臂履带驱动组件结构示意图;
图中:1、车体框架组件;2、第一主履带驱动组件、3、第一摆臂履带驱动组件;4、主履带;5、电池;6、控制器;7、第二主履带驱动组件;8、第二摆臂履带驱动组件;101、底板;102、盖板;103、左侧板;104、右侧板;201、编码器;202、输入轴;203、压板;204、无框电机组件;205、谐波减速器;206、套筒;207、输出轴;208、主履带驱动安装座;301、摆臂驱动电机;302、支座;303、摆臂驱动齿轮;304、惰轮;305、摆臂从动齿轮;306、左半轴;307、右半轴;308、联轴器;309、支撑座;310、摆臂履带组件。
具体实施方式
下面结合附图及具体实施例对本发明作进一步详细说明。
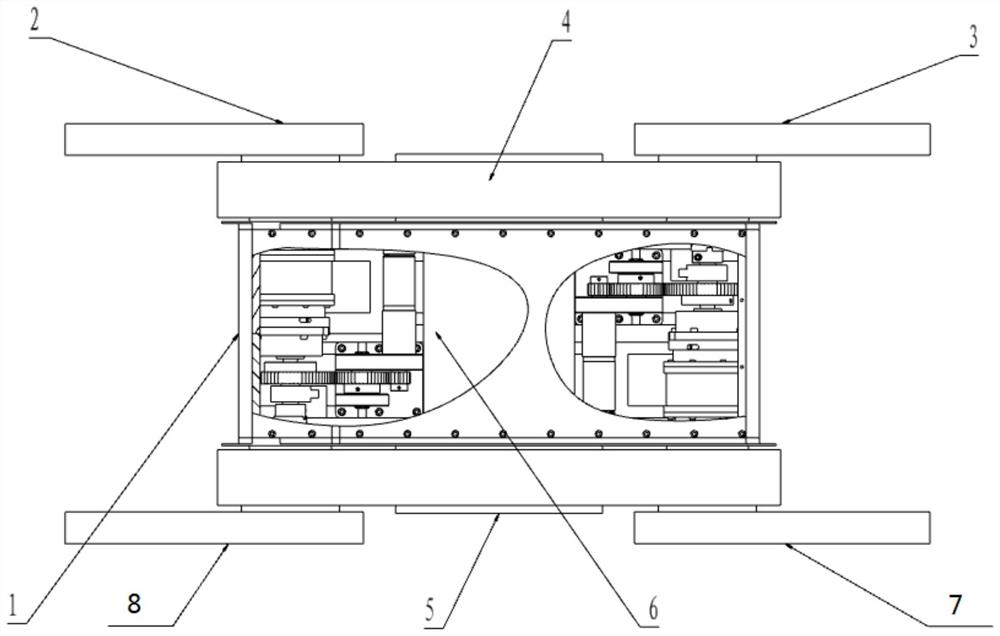
如图1~4所示,一种耐辐照双摆臂履带式机器人传动装置,包括车体框架组件1、第一主履带驱动组件2、第一摆臂履带驱动组件3、第二主履带驱动组件7和第二摆臂履带驱动组件8,其中,第一摆臂履带驱动组件3和第二摆臂履带驱动组件8结构相同,并安装在车体框架组件1的前后两端;所述第一摆臂履带驱动组件3和第二摆臂履带驱动组件8左右两侧分布为传动部件集中端和单轴输出端;第一主履带驱动组件2和第二主履带驱动组件7结构相同且轴线为中空结构,所述第一主履带驱动组件2和第二主履带驱动组件7分别穿过第二摆臂履带驱动组件8、第一摆臂履带驱动组件3结构中的单轴输出端侧,并固定在车体框架组件1的前后对角两侧,使所述第一摆臂履带驱动组件3和第二摆臂履带驱动组件8中传动部件集中端前后对角分布在车体框架组件1前后两侧;在车体框架组件1左右两侧安装有主履带4,通过第一主履带驱动组件2和第二主履带驱动组件7可驱动主履带4,带动车体框架组件1前后移动和转弯;在车体框架组件1上还安装有电池5和控制器6,利用控制器6控制第一主履带驱动组件2、第一摆臂履带驱动组件3、第二主履带驱动组件7和第二摆臂履带驱动组件8中各自的电机的转动,并利用电池5所提供动能进行运动;
如图2所示,车体框架组件1包括底板101、盖板102、左侧板103和右侧板104组成的壳体结构,在左侧板103和右侧板104前后两侧分别开有通孔,为摆臂履带驱动组件和主履带驱动组件最外侧的输出端与内部结构提供连接通道;该车体框架组件1整体采用耐辐照材料制成,能够为内部结构提供耐辐射的工作环境;在盖板102上开设有机械臂组件安装的机械接口,可以安装不同用途的机械臂组件,已满足不同环境、用途场景中机器人的使用。
如图4所述,摆臂履带驱动组件包括摆臂驱动电机301、摆臂驱动齿轮303、支座302以及摆臂履带组件310,其中,摆臂驱动电机301通过支座302固定在车体框架组件1中的底板101上;摆臂驱动电机301输出轴上安装的摆臂驱动齿轮303通过惰轮304与摆臂从动齿轮305形成齿轮传动结构,该摆臂从动齿轮305通过支撑座309固定在底板101上;摆臂从动齿轮305右侧为长杆状的右半轴307,摆臂从动齿轮305左侧通过固定安装的联轴器308与左半轴306相连接,在右半轴307和左半轴306的端部通过平键分别与两个摆臂履带组件310进行连接;摆臂驱动电机301中电机减速箱输出的动力通过驱动齿轮303、惰轮304传递至摆臂从动齿轮305,并带动右半轴307和左半轴306的转动,从而带动左右两侧的摆臂履带组件310运动,通过改变摆臂驱动电机301的运转方向即可实现摆臂运动的换向;
如图3所述,主履带驱动组件包括输入轴202、无框电机组件204、谐波减速器205、套筒206以及输出轴207,其中,无框电机组件204通过压板203固定在套筒206中,在无框电机组件204中心轴线上设置有中空的输入轴202,无框电机组件204的转子可带动输入轴202转动,使穿过无框电机组件204上的输入轴202上端部通过法兰与设置在套筒206中的谐波减速器205的波发生器端连接,输入轴202的下端与编码器201相连接;谐波减速器205的刚轮与输出轴207相连接,使输入轴202的运动经过谐波减速器205传输至输出轴207,该输出轴207通过平键与主履带驱动安装座208相连接,该主履带驱动安装座208上设置有主履带驱动轮,主履带驱动轮与主履带4啮合,并带动摆臂履带组件310上的从动轮运动;通过两个主履带驱动组件中各自的无框电机组件204的转动方向,可以实现车体前进、后退以及左右转弯运动;
主履带驱动组件中心为中空结构,其套入摆臂履带驱动组件中的右半轴307上,并固定在底板101上,通过主履带驱动组件与主履带驱动组件相结合的结构,能够大大节省车体框架组件1内部的空间,便于安装电气元件和走线布置。
- 一种双摆臂式张力控制装置及双摆臂式叠片机
- 一种耐辐照双摆臂履带式机器人传动装置
- 一种小型双摆臂履带式移动机器人平台