示教装置以及计算机程序
文献发布时间:2023-06-19 19:14:59
技术领域
本发明涉及各种操作处理装置中的示教装置以及计算机程序,尤其涉及在触摸面板上操作的示教装置以及计算机程序。
背景技术
以往,在操作机器人的情况下,使用专用的示教操作盘进行手动操作。另一方面,在机床中,使用通过旋转式的拨盘装置(手动脉冲发生器)进行手动操作的单元,在机器人的操作方法中也导入旋转式拨盘装置。旋转式拨盘装置由于能够以1刻度为单位指定机械的动作量,因此具有容易进行精细的定位操作的优点。另外,还提出了使用平板电脑等作为机器人的示教操作盘并基于显示于显示画面的信息来操作机器人的方法(专利文献1)。
现有技术文献
专利文献
专利文献1:日本特开平9-297611号公报
发明内容
发明所要解决的课题
在现状中,所述旋转式的拨盘装置作为机器人的示教装置几乎不装备在操作盘上,因此需要另外准备。另外,还考虑在平板电脑等带触摸面板的装置上显示旋转式拨盘来操作机器人的方法。然而,在这样的带触摸面板的装置中显示旋转式拨盘的操作成为画面上的操作,因此无法得到旋转式拨盘装置的操作感,产生错误地指定操作量的可能性。这不限于机器人的示教装置,在机床等其他工业机械的示教装置中也会产生同样的问题。
因此,在包含机器人、机床在内的工业机械的示教装置中,在带触摸面板的装置上显示旋转式拨盘而操作机械时,为了在不错误地操作操作量的情况下准确地指定操作量,要求得到操作感并提高操作性。
用于解决课题的手段
为了解决上述课题,本公开的示教装置是在工业机械中具备成为输入接口的触摸面板式的显示画面的示教装置,具备:旋转式拨盘显示部,其在所述显示画面中显示操作者能够进行旋转操作,并对所述旋转操作量附加刻度的旋转式拨盘;旋转操作量取得部,其取得操作者对所述旋转式拨盘进行了旋转操作的旋转操作量;动作量指定部,其根据所述旋转式拨盘的旋转操作量来指定所述工业机械的动作量;以及效果音或振动的发送部,其在每当旋转操作所述旋转式拨盘的1刻度量的旋转操作量时发出效果音或振动。
发明效果
根据本公开的示教装置,每当旋转操作旋转式拨盘的1刻度量的旋转量时发出效果音或振动,因此操作者能够以操作感获得进行了多少刻度数的操作。因此,能够避免因得不到操作感而产生的操作量的错误识别,能够得到操作性提高的示教装置。
附图说明
图1是表示1个实施方式的机器人、控制装置、示教装置的关系的结构图。
图2是表示另一实施方式的机器人、控制装置、示教装置的关系的结构图。
图3是表示关于示教装置的显示画面的1个实施方式的图。
图4是表示示教装置的显示画面的另一实施方式的图。
图5是表示本公开中的示教装置进行的机器人操作的步骤的流程图。
图6是表示本公开中的示教装置进行的机器人操作的步骤的另一实施方式的流程图。
具体实施方式
以下,参照附图对本发明的实施方式进行详细说明。
图1是表示本公开的1个实施方式的机器人、控制装置、示教装置的关系的结构图。图1的机器人1能够通过具有多关节的臂的多关节机器人进行正交动作和旋转动作。通过机器人的机构部的限制,针对每个动作轴对正交动作中的移动距离以及旋转动作中的旋转角度分别决定上限值/下限值,各动作轴在恒定的范围内动作。
控制装置2将由微型计算机等构成的处理单元(CPU)21、包含ROM、RAM等存储器部件的存储单元22以及与机器人1及示教装置3之间进行信号的收发的收发单元23作为构成要素。示教装置3是具备触摸面板的示教操作盘,基于来自触摸面板的操作者的输入,向控制装置2发送关于机器人1的动作的示教信号。示教装置3具备旋转式拨盘显示部301、旋转操作量取得部302、动作量指定部303、效果音或振动的发送部304、动作坐标系及动作轴的选择部305以及1刻度操作量设定部306。
图2是表示本公开的另一实施方式的机器人、控制装置、示教装置的关系的结构图。图2的实施方式与图1的实施方式的不同点在于,在图1中,示教装置3通过有线与控制装置2连接,但在图2中,示教装置3通过无线与控制装置2连接。因此,在图2的实施方式中,示教装置3不限于具备触摸面板的示教操作盘,也可以是平板电脑。控制装置2与用于与示教装置3进行无线通信的Wi-Fi路由器连接。通过无线地连接控制装置2和示教装置3,操作者能够在远离机器人1和控制装置2的位置操作示教装置3,提高与操作者的操作位置有关的自由度。
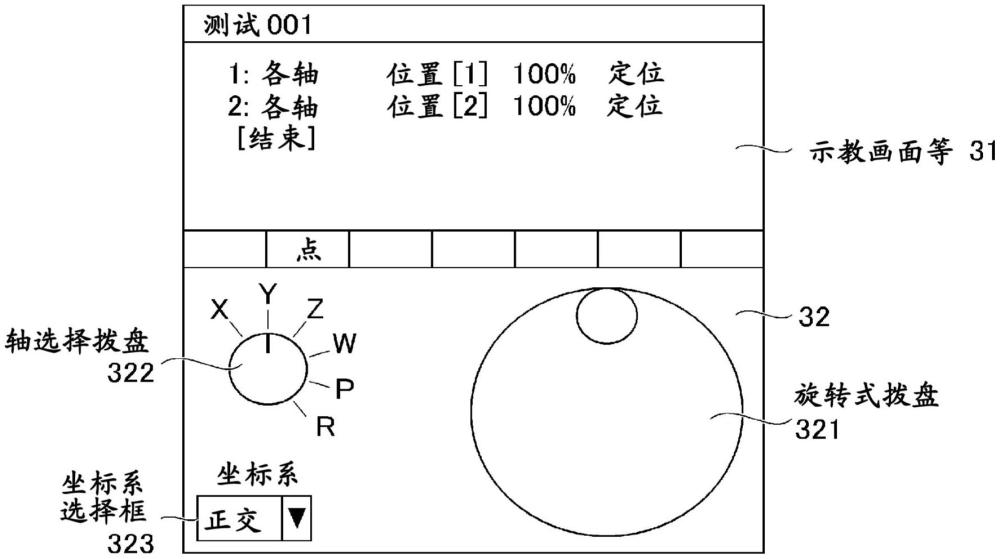
图3表示关于示教装置3的显示画面的1个实施方式。示教装置3的显示画面如果较大地划分,则由示教画面31和操作画面32构成。在示教画面31中,以文本表示在机器人1的动作中选择的轴、机器人1的动作的结果、示教的位置的内容。操作画面32配置于示教画面31的下方。旋转式拨盘显示部301在操作画面32中显示旋转式拨盘321。在操作画面32中,另外设定并显示轴选择拨盘322、坐标系选择框323。
旋转式拨盘321是用于通过使显示画面中的图像的旋转式拨盘旋转而使机器人1在由动作坐标系和动作轴的选择部305选择出的坐标系中在所选择的轴的方向上动作的单元。从旋转式拨盘的旋转操作到机器人的动作成为如下的处理步骤:由旋转操作量取得部302取得操作者对所述旋转式拨盘进行了旋转操作的旋转操作量,动作量指定部303根据取得的旋转操作量来指定机器人1的动作量,机器人1按照所指定的动作量进行动作。轴选择拨盘322是操作者选择由动作坐标系和动作轴的选择部305选择的动作轴的拨盘,在图3中,是从XYZ的直线移动轴和WPR的转动轴来选择轴的拨盘式的选择单元。坐标系选择框323从下拉菜单中选择由动作坐标系和动作轴的选择部305选择的动作坐标系。在实施例中,选择是正交坐标系还是旋转坐标系。在操作画面32中,作为操作机器人1的步骤,首先,从坐标系选择框323选择正交坐标系还是旋转坐标系。根据所选择的坐标系,由轴选择拨盘322显示的轴发生改变。接着,在通过轴选择拨盘322选择了想要动作的轴的基础上,能够通过使旋转式拨盘321旋转操作而在所选择的轴的方向上操作机器人1。
图4表示关于示教装置3的显示画面的另一实施方式。图4的实施方式与图3的实施方式的不同之处在于,在图3中,选择轴的单元是轴选择拨盘322,但在图4中,是轴选择按钮332。当点击轴选择按钮的图标时,轴选择按钮332显示可选择的轴。在图4中,显示了XYZ的直线移动轴和WPR的转动轴。
在旋转式拨盘321的旋转操作中,通过效果音或振动的发送部304,根据旋转操作量发出效果音或振动。具体而言,每当进行对旋转式拨盘设定的1刻度的旋转操作时,发出效果音或振动。这是为了操作者通过听觉或触觉的操作感来识别旋转操作的操作旋转量前进了旋转式拨盘的1刻度的量。
另外,效果音或振动的发送部304在正交动作时和旋转动作时改变模式而发出效果音或振动。这是为了操作者通过听觉或触觉的操作感来识别当前机器人正在以正交动作工作还是以旋转动作工作。
另外,具备能够设定与旋转式拨盘321的1刻度对应的操作量的1刻度操作量设定部306,与旋转式拨盘321的1刻度对应的距离或角度的操作量由操作者或自动地设定。如上所述,在机器人1中,针对每个动作轴以特定范围内的动作量进行动作。另外,1刻度操作量设定部306也能够根据与动作范围的上限的距离或角度之差自动地变更旋转式拨盘321的1刻度量的操作量。在动作范围的上限附近,通过将1刻度量的操作量设定得较小,期待难以到达动作范围外。并且,根据操作者对旋转式拨盘321的操作方向,也能够变更1刻度量的操作量。也能够在操作方向朝向机器人1的动作轴的动作范围的上限值的方向,将1刻度量的操作量设定得较小,在从动作范围的上限值向初始的动作值返回的方向上,将1刻度量的操作量设定得较大。
在由于在机器人1中发生异常状态等而无法操作机器人1的情况下,旋转式拨盘显示部301变更旋转式拨盘321的显示。此时,旋转式拨盘显示部301使旋转式拨盘321无法旋转。另外,动作量指定部303停止基于旋转式拨盘321的旋转操作的对机器人1的指令。另外,效果音或振动的发送部304发出与机器人1的正常动作时不同的效果音或振动。效果音或振动既可以在发生了异常状态时提示一次,也可以在异常状态发生中始终提示。另外,在想要操作旋转式拨盘321的情况下,通过再次提示效果音或振动,能够使操作者再次识别在异常状态下无法进行机器人的手动操作的情况。
在机器人1的自动运转中,无法通过旋转式拨盘321的旋转操作来操作机器人1。旋转式拨盘显示部301将旋转式拨盘321变更为与通常不同的显示,在操作者想要操作的情况下也不旋转。动作量指定部303停止基于旋转式拨盘321的旋转操作的对机器人1的指令。另外,在想要操作旋转式拨盘321的情况下,效果音或振动的发送部304发出与机器人1的正常动作时不同的自动运转中用的效果音或振动。
在本公开的示教装置3中,在显示画面中同时显示示教画面31和操作画面32。通过同时显示示教画面31和操作画面32,能够不切换画面地进行基于旋转式拨盘321的机器人1的操作和位置示教。
接着,利用图5的流程图来表示本公开中的利用示教装置3进行的机器人1的示教操作的步骤。如图5所示,首先,操作者在示教装置3的操作画面32中通过坐标系选择框323选择操作的机器人1的坐标系,通过动作坐标系及动作轴的选择部305选择机器人1的坐标系(步骤St1)。接着,操作者通过轴选择拨盘322(或者轴选择按钮332)选择操作的机器人1的动作轴,通过动作坐标系及动作轴的选择部305选择机器人1的动作轴(步骤St2)。
接着,在1刻度操作量设定部306中,根据所选择的轴的动作范围设定旋转式拨盘中的1刻度量的操作量(步骤St3)。此时,如上所述,在动作范围的上限值附近,将1刻度量的操作量设定得较小。由此,期待难以到达动作范围外。并且,也能够在操作方向朝向机器人1的动作轴的动作范围的上限值的方向上,将1刻度量的操作量设定得较小,在从动作范围的上限值向初始的动作值返回的方向上,将1刻度量的操作量设定得较大。
在步骤St1至步骤St3的设定结束后,对由旋转式拨盘显示部301显示的旋转式拨盘321进行旋转操作,通过旋转操作量取得部302取得旋转操作量。在该旋转式拨盘321的旋转操作中,每当所述旋转操作量达到旋转式拨盘321的1刻度量时,效果音或振动的发送部304发出效果音或振动。并且,动作量指定部303根据所述旋转操作量指定机器人的动作量,根据所指定的动作量使机器人1实际动作。(步骤St4)。此时,在步骤St3中,若将朝向动作范围的上限值的方向的移动量设定得较小,则在朝向动作范围的上限值的方向的移动中,容易进行位置的微调整。
为了使机器人1移动至示教点,需要一边变更坐标系、轴、移动量一边进行操作。因此,在通过旋转式拨盘321的旋转操作使机器人1移动的过程中,判定是否需要设定坐标系、轴、移动量(步骤St5)。在步骤St5的判定结果为“是”的情况下,即在旋转式拨盘321的旋转操作中需要变更坐标系、轴、移动量中的任一个的情况下,中止旋转式拨盘321的旋转操作,根据需要设定的是坐标系还是轴还是移动量,分别返回到步骤St1、步骤St2、步骤St3中的任一个进行变更。然后,返回到步骤St4,根据在各步骤中新设定的坐标系、轴、移动量来操作旋转式拨盘321使机器人移动。
接着,在机器人1到达示教点的时刻停止旋转式拨盘321,使机器人1停止(步骤St6)。然后,将此时的机器人1的当前位置作为示教点存储于机器人程序(步骤St7)。通过重复步骤St1~St7,能够将多个示教点存储在机器人程序中。
接着,判定机器人1的动作的作业是否完成(步骤St8)。在步骤St8的判定结果为“是”的情况下,即在机器人1的动作的作业完成的情况下,作业的全部工序结束,该流程结束。在步骤St8的判定结果为“否”的情况下,即在机器人1的动作的作业未完成而继续的情况下,返回步骤St4,操作旋转式拨盘321来使机器人移动。
接着,在图6的流程图中示出在本公开中的机器人1的自动运转中发生了异常时,利用旋转式拨盘321进行恢复作业的步骤。如图6所示,首先,从自动运转的开始(步骤St1’)发生。在自动运转开始后,旋转式拨盘321变化为与正常动作时不同的颜色,无法操作旋转式拨盘321。另外,当想要操作旋转式拨盘321时,发出与正常动作时不同的效果音、振动。然后,接着判定机器人1是否发生了异常(步骤St2’)。在判定结果为“否”的情况下,即未发生异常的情况下,进行自动运转,移至步骤St8’。
在步骤St2’的判定结果为“是”的情况下,即发生了异常的情况下,中止机器人1的自动运转,机器人1停止(步骤St3’)。另外,此时,旋转式拨盘321变化为与正常动作时不同的颜色,无法对旋转式拨盘321进行操作。另外,若异常发生中或者想要操作旋转式拨盘321,则发出与正常动作时不同的效果音、振动。接着,操作者确认异常警报的内容,进行异常的恢复作业,排除异常的主要原因(步骤St4’)。若排除异常的主要原因,则旋转式拨盘321的颜色、效果音、振动返回到通常时所用,能够进行基于旋转式拨盘321的机器人1的操作。
接着,操作者在再次开始机器人1的自动运转时判定机器人1是否干扰工件或周边设备(步骤St5’)。在判定结果为“是”的情况下,即在机器人1有可能干扰工件或周边设备的情况下,转动旋转式拨盘321,使机器人1退避(步骤St6’)。之后,再次开始机器人1的自动运转(步骤St7’)。在再次开始后,与St1’后同样地,旋转式拨盘321的颜色发生变化,无法进行旋转式拨盘321的操作,若要操作,则发出与正常动作时不同的效果音、振动。然后,判定是否结束机器人1的自动运转(步骤St8’)。在判定结果为“是”的情况下,机器人1的自动运转结束,该流程结束。在判定结果为“否”的情况下,继续机器人1的自动运转,返回步骤St2’。然后,重复从步骤St2’到步骤St8’的循环,直到在步骤St8’中判定为自动运转结束。
接着,对本公开的发明的示教装置的效果进行说明。首先,作为表示成为本公开的示教装置的中心的特征的基本效果,如上所述,每当对旋转式拨盘的1刻度量的旋转量进行旋转操作时发出效果音或振动,因此操作者能够得到进行了多少刻度数的操作来作为操作感,因此,能够避免因无法得到操作感而产生的操作量的错误识别。
另外,在如本公开的示教装置那样,机器人通过示教装置的旋转操作进行正交动作以及旋转动作这两者的情况下,在从机器人的正交动作向旋转动作、或者从旋转动作向正交动作变更而反复进行两个动作时,目前难以识别处于哪个动作状态,因此有可能进行错误动作。在本公开的示教装置中,效果音或振动在正交动作时和旋转动作时改变模式而发出,因此,操作者能够通过听觉或触觉的操作感来识别当前机器人是以正交动作进行动作还是以旋转动作进行动作。因此,能够避免与机器人的动作状态有关的错误识别所引起的错误动作,能够提高操作性。
另外,在本公开的示教装置中,也能够根据与动作范围的上限的距离或角度之差自动地变更旋转式拨盘的1刻度量的操作量。因此,也能够在操作方向朝向动作轴的动作范围的上限值的方向上,将1刻度量的操作量设定得小,在从动作范围的上限值向初始的动作值返回的方向上,将1刻度量的操作量设定得大。通过这样设定,能够避免到达动作范围外,避免操作到动作范围外的错误动作,并且能够从动作范围外的附近向相反方向以通常的速度返回,因此,从操作速度的观点出发也能够使操作性高。
另外,在本公开的示教装置中,在机器人发生了异常状态的情况下,变更旋转式拨盘的显示,并且停止基于旋转式拨盘的旋转操作的对机器人的指令,另外,在异常状态的发生中或者想要操作旋转式拨盘的情况下,发出与机器人的正常动作时不同的效果音或振动,因此操作者能够尽早注意到异常状态,避免在保持异常状态的状态下继续进行操作。由此,能够避免继续进行无用的操作,并且能够防止由于在保持异常状态的状态下继续操作使机器人受到损伤。
另外,即使在机器人处于自动运转中的情况下,也变更旋转式拨盘的显示,并且停止基于旋转式拨盘的旋转操作的对机器人的指令。另外,在想要操作旋转式拨盘的情况下,发出与机器人的正常动作时不同的效果音或振动,因此操作者能够注意到机器人处于自动运转中,能够避免在自动运转中想要继续进行操作。
另外,在本公开的示教装置中,通过同时显示示教画面和操作画面,能够不切换画面地进行基于旋转式拨盘的机器人的操作和位置示教,因此能够一边识别位置示教一边进行操作,操作性提高,能够防止错误动作。
以上,关于本发明的实施方式,对实施方式进行了说明,但本发明并不限定于这样的实施方式,例如,在机器人的实施方式中进行了说明,当然也能够应用于包含各种机床的其他工业机械的实施方式,在不脱离本发明的主旨的范围内,能够以各种方式实施。
附图标记说明
1 机器人
2 控制装置
21 处理单元
22 存储单元
23 收发单元
3 示教装置
301 旋转式拨盘显示部
302 旋转操作量取得部
303 动作量指定部
304 效果音或振动的发送部
305动作坐标系及动作轴的选择部
306 1刻度操作量设定部
31 示教画面
32 操作画面
321 旋转式拨盘
322 轴选择拨盘
323 坐标系选择框
332 轴选择按钮。
- 示教器热插拔装置、工业机器人及其示教器热插拔方法
- 机械臂示教方法、装置、系统、介质、控制器及机械臂
- 一种通过视觉编程的示教器装置
- 状态信息获取和反馈方法、装置、介质、终端及示教器
- 用于修正机器人的示教位置的装置、示教装置、机器人系统、示教位置修正方法以及计算机程序
- 机器人的示教装置、机器人装置、机器人的示教装置的控制方法以及机器人的示教装置的控制程序