一种基于A星优化算法的智慧轮椅寻路方法
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及一种基于A星优化算法的智慧轮椅寻路方法。
背景技术
目前,我国老龄化人口比重不断上升,腿脚不方便的老年人越来越多,因为各种灾难或者意外造成身体残疾的人数也在增加,普通的轮椅虽然价格便宜,但是使用起来比较费力,只是机械式的代步工具,且安全指数不高。这类人士迫切地需要一种智能轮椅来协助他们的日常生活,减轻生活负担。随着近些年来人工智能和互联网的快速发展,轮椅也在不断地升级换代,智能化、数据化也是未来的发展方向。其中轮椅自动寻路作为智慧轮椅的基础功能之一,即轮椅按照程序指定的合适路径从地图的A点抵达B点,根据轮椅对周围环境了解程度不同,分为全局路径规划和局部路径规划两种方法。
随着网络的快速发展,寻路技术已经成为智能运动设备中一个核心组成部分。物体按照某种指定方式移动,就要求程序必须能够找到一条从起点到目标点的最佳路径,这条路径应该是绕过障碍物并且到达目的地的最短的路径,而A星算法就是完成这个任务的最好算法。启发式A星搜索算法,就是有启发地寻找目标结束点,并且在基于最小成本的情况下,尽可能的找到通向目标点的最合适最短的路径。但是传统A星算法在面对障碍时会进行许多无用节点的搜索,国内外的学者也对此进行了大量的研究,例如:王善坤等根据改进的人工势场法让绕过障碍物的曲线更加平滑,但是依然需要在障碍物周围进行搜索;蔡方方等根据双层A星算法进行二次搜索来绕过障碍物,虽然可以避开障碍物,但是增加了A星算法的搜索时间;高庆吉等引入了“人工搜索标记”起到预先判断或者逃离障碍物的作用,但是需要对障碍物周围进行无用节点的预搜索处理。综上所述,虽然目前学者们做出了许多研究,但是依然存在搜索过程中无用节点的出现。本发明在A星算法的基础上,并且在A星算法搜索的过程中,添加了一个对障碍物预处理的方案,使角色能顺利的绕开障碍,减少搜索所用的时间和内存,从而更加智能的到达目标节点。
发明内容
本发明提供一种基于A星优化算法的智慧轮椅寻路方法,本发明克服现有技术中A星算法寻路过程中的作用及缺陷,通过减少在每步搜索的扩展方向,达到减少遍历节点的效果,提升算法搜索效率,并对规划出的路径进行剪枝处理,优化路线,使路线更短。
本发明所采用的技术方案有:
一种基于A星优化算法的智慧轮椅寻路方法,包括
步骤1):根据轮椅所在区域构建栅格地图,并确定栅格地图中障碍物的位置坐标、轮椅的起始点坐标和目标点坐标,创建A星算法的open列表和close列表,将所述起始点坐标加入close列表中;
步骤2):判断栅格地图中起始点是否能够直接到达目标点,若能,则完成规划路线;若不能,则进行下一步;
步骤3):将加入到close列表中的起始点坐标作为下一路径的父节点;
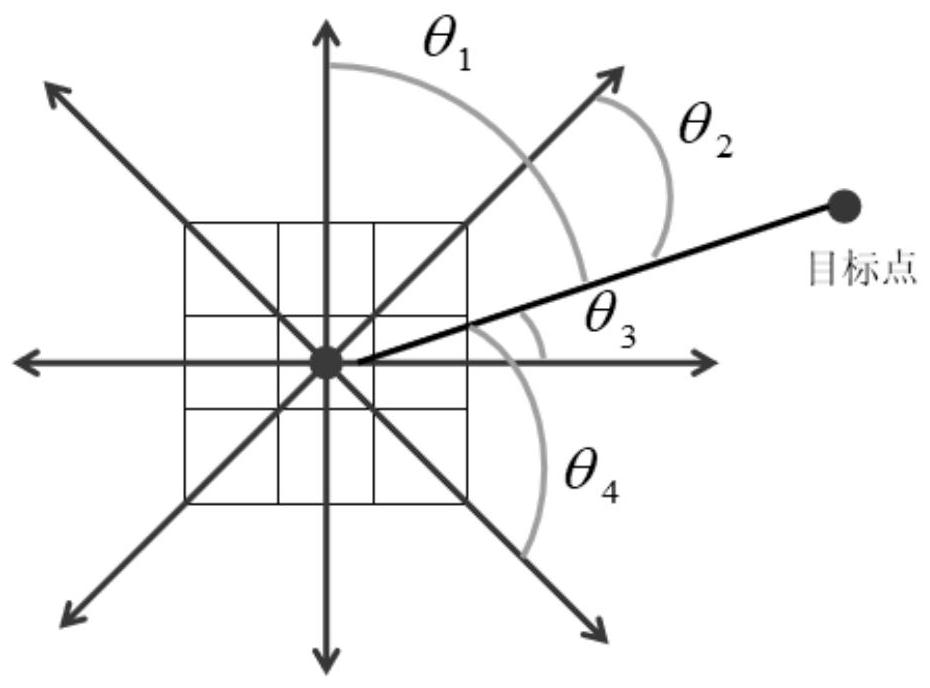
步骤4):连接父节点和目标点,分别计算父节点8个方向中每个方向与连接父节点与目标点的直线的夹角,选择夹角小于90°的方向上节点,并加入到open列表中;
步骤5):计算open列表中估价函数代价值最小的节点作为下一扩展的父节点,并将该父节点加入到close列表中;
步骤6):判断步骤5)中所述代价值最小的节点是否为目标点,若为目标点,则完成规划路线,若不是目标点,则返回步骤4);
步骤7):完成规划路线后,进行路线剪枝优化处理。
进一步地,所述剪枝优化处理过程为:
从规划路线中的目标点开始向前推,直到不能直线到达的节点的上一个节点,中间的节点便可以省略;
然后将上述的上一节点作为新起点,继续开始向前推,依次循环,直到到达起点,完成路线优化。
进一步地,步骤2)中判断栅格地图中起始点是否能够直接到达目标点是通过:判断连接起始点与目标点的直线上是否避开障碍物,若避开则说明能够直接到达。
进一步地,步骤4)中父节点的八个方向是指:上、下、左、右、左上、左下、右上和右下。
进一步地,所述A星算法的评估函数为:
f
其中:f
A星优化算法用f来表示评估函数代价值,通过计算open列表中评估函数代价值最小的节点作为下一扩展的父节点;在进行路径规划之前需要创建使用open和close两个列表来完成节点的扩展和最小f值代价节点的存储,将规划路径中遇到的扩展节点保存到open列表中,并将这些扩展节点依照代价值得大小排序,close列表用来保存确定的路径节点和在open列表中代价最小f值代价节点。
本发明具有如下有益效果:
1)本发明针对目前的寻路方法,将原来的8方向扩展方式改为5方向扩展,从而提升算法规划线路的效率,同时减少了遍历节点。
2)对规划后的路线进行剪枝处理,优化了路线,使路线距离更加短。
附图说明
图1为用坐标系的方式表示父节点8个方向的示意图,其中θ
图2为剪枝优化处理原理图。
图3a为原寻路路径图。
图3b为本发明寻路路径图。
图4为对图3b的寻路路径进行剪枝优化后的路线图。
具体实施方式
下面结合附图对本发明作进一步的说明。
如图1至图4,本发明一种基于A星优化算法的智慧轮椅寻路方法,包括如下步骤:
步骤1):根据轮椅所在的区域构建相应的地图,将地图划分为多个正方形网格,同时表明其中的起始点、目标点以及搜索域中无法通过的障碍节点的位置,并建立坐标系,确定地图中存在障碍物位置的坐标和需要到达的目标点位置,创建A星算法的open列表和close列表,将起始点加入到close列表中;
A星算法的评估函数为:
f
其中f
A星算法在进行路径规划之前需要创建使用open和close两个列表来完成节点的扩展和最小代价节点的存储,将规划路径中遇到的扩展节点保存到open列表中,并将这些扩展节点依照代价值得大小排序,close列表用来保存确定的路径节点和在open列表中代价最小的节点。
步骤2):判断起始点能否直接到达目标点,若能,则完成规划路线,若不能,则进行下一步;
步骤3):将加入到close列表中的起始点坐标作为下一路径的父节点;
步骤4):用坐标系的方式表示父节点8个方向,
N=[(1,0),(1,1),(0,1),(-1,1),(-1,0),(-1,-1),(0,-1),(1,-1)],目标点的位置为G=(g
步骤5):通过步骤4)计算得到的下一扩展节点加入到open列表中;
步骤6):计算open列表中估价函数代价值最小的节点作为下一步扩展的父节点,并将该父节点加入到close列表中;
步骤7):判断该节点是否为目标点,若为目标点,则完成路线规划,若不是目标点,则返回步骤4)继续扩展;
步骤8):规划完路径后,对规划出的路径进行剪枝优化。通过对规划出的路线进行剪枝处理,假设规划的初始路径为:S
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下还可以作出若干改进,这些改进也应视为本发明的保护范围。
- 一种基于ROS的智能轮椅及其使用方法
- 一种基于反光布和激光雷达的轮椅自动跟随系统及方法
- 一种基于A星优化算法的寻路方法
- 一种基于A星优化算法的寻路方法