一种全自动稳定控制的被动调Q激光器
文献发布时间:2023-06-19 19:20:08
技术领域
本申请涉及激光器的技术领域,特别是一种全自动稳定控制的被动调Q激光器。
背景技术
调Q技术是脉冲激光的主要技术,尤其是纳秒级以上的高重频激光器。可分为主动和被动两种调Q方式。主动调Q一般利用转镜、电光调Q晶体和声光调Q晶体进行开关,需要比较复杂的调Q高压控制电路,而且高压信号对其他电路,尤其光电探测电路容易产生干扰,同时也不安全,另外新增加的受控电光器件也为光机结构增加了复杂度和风险点。与之相比,被动调Q一般利用可饱和吸收晶体的突变特性实现Q开关,无需复杂的高压控制电路,而且良好的被动调Q晶体在现有使用的激光波段具有吸收截面大,驰豫截面短和生育吸收截面小,以及物化性能稳定,导热性好,抗损伤,防潮等特性。因此,被动调Q具有结构简单、运转可靠、效率高、安全、体积小巧、成本低廉等优点,在激光测距、遥感探测、激光通信、医疗健康等军事和民用领域得到了广泛应用。
然而,与主动调Q方式相比,被动调Q脉冲激光器的脉冲重复频率、输出延时和能量的稳定性都比较差,严重时出现子脉冲或无脉冲情况。在多波束激光雷达技术领域,这些缺点造成难以精确测量,难以单个脉冲标记,并且控制多路被动调Q激光器同时出光,主波波门会成倍加大,影响了激光雷达的应用。
发明内容
为解决以上问题,本发明提出了一种通过实时反馈实现激光器重复频率、出光时刻和能量全自动稳定控制的被动调Q激光器。采用全自动数字控制,对多输入参数和多输出控制量的调整方法进行了合理的组合和排序,同时考虑了光机的要求、电路的简化和信号的优化,为后续使用被动调Q激光器的星载激光雷达提供了技术保障。
第一方面,提供了一种被动调Q激光器,包括泵浦LD、激光增益介质、被动调Q晶体、输出镜、耦合透镜、光纤分束器、光电探测器和激光器驱动源;
所述激光增益介质、所述被动调Q晶体、所述输出镜依次排列组成激光谐振腔,用于吸收并放大所述泵浦LD所输出能量;
所述耦合透镜用于将所述输出镜输出激光耦合到所述光纤分束器中;
所述光纤分束器用于将输出激光分为输出光和反馈光两部分,所述反馈光接入所述光电探测器中;
所述光电探测器用于实时监测光纤分束器分得的光信号,转化为电信号,反馈给激光器驱动源中;
所述激光器驱动源包括第一驱动电路、第二驱动电路和第三驱动电路,所述第一驱动电路、所述第二驱动电路和所述第三驱动电路输出的电流叠加,得到用于驱动所述泵浦LD的信号,所述第一驱动电路输出电流值为I1的第一驱动电流,所述第二驱动电路输出电流值为I2的第二驱动电流,所述第三驱动电流输出电流值为I3的第三驱动电流,所述泵浦LD的阈值电流为ITH,I1
所述激光器驱动源还用于对所述光电探测器反馈的信号进行处理,转化为激光器出光时延和激光器能量值,并根据所述出光时延和激光器能量值调整第一驱动电路、第二驱动电路和第三驱动电流的电流参数。
与现有技术相比,本申请提供的方案至少包括以下有益技术效果:
激光器是星载激光雷达的核心组成部分,此被动调Q激光器利用现有的光电监测功能形成反馈,将光电探测器实时监测得到的波形,转化为激光器出光时延和能量值,通过计算之后与设置值作比较,用以控制泵浦驱动源电路各参数,使激光器重复频率、出光时刻和能量自动稳定在设置值附近,且抖动很小。
本发明方案可全自动有效地控制被动调Q激光器重复频率、出光时延和能量,并抑制其抖动,提高了被动调Q激光器重复频率、出光时刻和能量的稳定性,提高了整体系统的测量精度和能力。同时由于其与外部同步信号的时延稳定,使用在多波束情况下,减小了总的时间抖动。既满足了在不同的应用工况下,实现多波束激光参数按需设计,又有利于激光主波信号的精确获取,降低下传数据量。可应用在使用被动调Q激光器的多波束激光雷达、激光测绘、遥感探测和激光对抗等领域。
结合第一方面,在第一方面的某些实现方式中,所述第一驱动电路、所述第二驱动电路均为恒流源电路,所述第三驱动电路为窄脉冲恒流源电路。
结合第一方面,在第一方面的某些实现方式中,第二驱动电流通断时序控制信号时序电路是在第一驱动电流通断时序控制信号电路之后接一个反相器,使得所述第二驱动电路在所述第一驱动电路作用时停止工作。
通过反相器可以灵活实现第一驱动电路和第二驱动电路切换。
结合第一方面,在第一方面的某些实现方式中,所述窄脉冲恒流源电路产生的恒流窄脉冲信号采用电容放电电路产生,所述电容放电电路采用的开关管为MOS或IGBT,用来放大反馈电流和开关管的运算放大器采用高速双电源运算放大器。
由此有利于使第三驱动电路输出波形相对优良的第三驱动电流。
结合第一方面,在第一方面的某些实现方式中,所述激光器驱动源包括:延时测量电路、单脉冲能量测量电路、泵浦驱动源控制电路、泵浦驱动源电路,其中所述泵浦驱动源电路包括所述第一驱动电路、所述第二驱动电路和所述第三驱动电流;
所述延时测量电路用于将所述光电探测器监测得到的波形和外部同步信号作比较,转化为激光器出光时延,反馈给所述泵浦驱动源控制电路;
所述单脉冲能量测量电路用于将所述光电探测器监测得到的波形测量峰值,转化为激光器能量值,反馈给所述泵浦驱动源控制电路;
所述泵浦驱动源控制电路用于接收所述激光器出光时延和所述激光器能量值,通过计算之后与设置值作比较,用以控制所述泵浦驱动源电路的电流参数;
所述泵浦驱动源电路用于接收所述泵浦驱动源控制电路输出的驱动信号和时序信号,产生驱动所述泵浦LD的信号。
激光器驱动源可以通过多个模块分别实现出光时延、脉冲能量的检测,并实现驱动源电路的灵活控制。
结合第一方面,在第一方面的某些实现方式中,所述被动调Q激光器还包括泵浦温度控制装置,所述泵浦温度控制装置用于检测所述泵浦LD的温度变化,所述激光器驱动源还包括泵浦温度控制电路,用于接收所述泵浦温度控制装置输出的温度信号,依据泵浦温度设置值、激光器出光时延和能量值的方差,输出控制信号驱动泵浦温度控制装置内部器件,达到泵浦温度稳定控制。
通过泵浦温度控制装置和泵浦温度控制电路,有利于使被动调Q激光器工作在合适的泵浦温度范围内。
结合第一方面,在第一方面的某些实现方式中,所述被动调Q激光器还包括晶体温度控制装置,所述晶体温度控制装置用于检测被动调Q晶体温度变化,所述激光器驱动源还包括晶体温度控制电路,所述晶体温度控制电路用于接收所述晶体温度控制装置输出的温度信号,依据晶体温度设置值、激光器出光时延和能量值的方差,输出控制信号驱动晶体温度控制装置内部器件,达到晶体温度稳定控制。
通过晶体温度控制装置和晶体温度控制电路,有利于使被动调Q激光器工作在合适的晶体温度范围内。
第二方面,提供了一种被动调Q激光器的控制方法,所述方法应用于如上述第一方面中的任意一种实现方式中所述的被动调Q激光器,所述方法由所述激光器驱动源执行,所述方法包括:
根据所述光电探测器反馈的信号,调整所述第三驱动电流的电流值I3和脉宽W3,直到能量峰值介于第一预设能量范围内,且输出激光无子脉冲或无脉冲情况,再调整所述第三驱动电流相对外同步信号时延T3,直到出光时延介于第一预设时延范围内;
根据所述光电探测器反馈的信号,调整所述第一驱动电流的电流值I1和脉宽W1,直到出光时延介于第二预设时延范围内,所述第二预设时延范围为在所述第一预设时延范围内的更小范围;
根据所述光电探测器反馈的信号,调整所述第二驱动电流的电流值I2和脉宽W2,直到能量峰值介于第二预设能量范围内,所述第二预设能量范围为在所述第一预设能量范围内的更小范围。
由于光学器件自身性能不稳定,被动调Q脉冲激光器输出的重复频率不稳定,时延和能量也会发生抖动。通过先粗调整能量,同时稳定重复频率,然后粗调整时延精度,再精调整时延精度,最后精调整能量精度的方式,有利于在能量处于合理范围内调整时延,并可以避免时延抖动对能量精细调整的影响。按照第三驱动电流值、第一驱动电流、第二驱动电流的顺序调整,从而按照对重复频率、时延、能量的综合影响程度进行调整,有利于提高被动调Q激光器的稳定性和控制效率。
结合第一方面,在第一方面的某些实现方式中,所述第一预设能量范围为能量设置值的±5%范围内,所述第二预设能量范围为所述能量设置值的±1%范围内,所述第一预设时延范围为时延设置值的±5%范围内,所述第二预设时延范围为所述时延设置值的±1%范围内。
粗调控和精调控分别设置合理的范围,有利于快速锁定相对较优的电流参数。
结合第一方面,在第一方面的某些实现方式中,所述方法具体包括:
将N次光脉冲能量峰值的平均值与设置值作比较,N的数值决定于激光重复频率大小;
若光脉冲能量平均值在所述第一预设能量范围内,则第三驱动电流值I3和第三驱动电流脉宽W3为最优值;
若光脉冲能量平均值大于所述第一预设能量范围的最大值,则降低第三驱动电流值I3和第三驱动电流脉宽W3;
若光脉冲能量平均值小于所述第一预设能量范围的最小值,则增加第三驱动电流值I3和第三驱动电流脉宽W3。
通过调整第三驱动电流值I3和第三驱动电流脉宽W3,有利于使光脉冲能量平均值处于相对合理的范围内。
结合第一方面,在第一方面的某些实现方式中,所述方法具体包括:
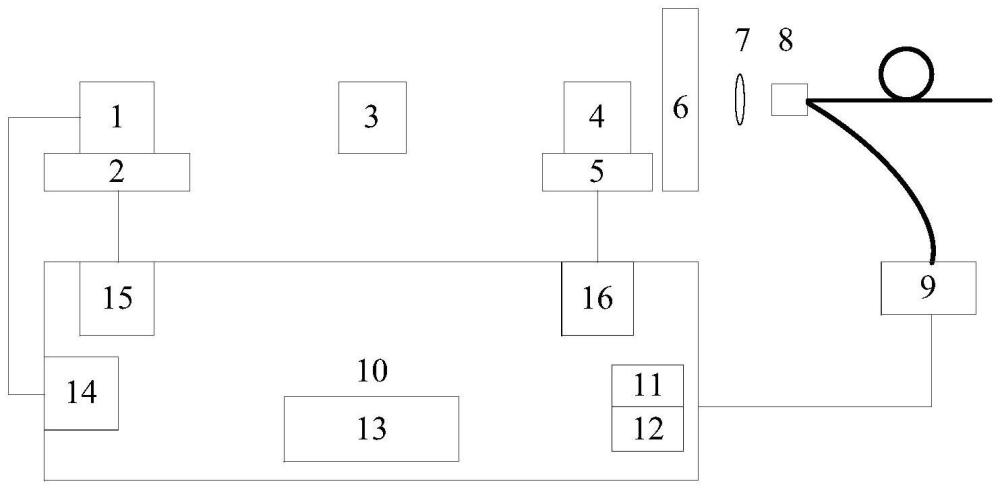
将激光器出光时延与设置值作比较得到Δt,第三驱动电流相对外同步信号时延调整量ΔT3=βΔt,使激光器出光时延稳定在所述第一预设时延范围内,再升高第一驱动电流值I1,使I1 在光脉冲能量平均值处于相对合理的范围内的情况下,调整第三驱动电流的时延和第一驱动电流值I1,有利于使激光器出光时延处于相对合理的范围内。 结合第一方面,在第一方面的某些实现方式中,所述方法具体包括: 升高第二驱动电流值I2,使I2 在光脉冲能量平均值和激光器出光时延均处于相对合理的范围内的情况下,调整第二驱动电流值I2,有利于进一步使激光器出光能量在合理范围内更加稳定。 结合第一方面,在第一方面的某些实现方式中,所述被动调Q激光器满足以下至少一项: 第一驱动电流相对外同步信号时延T1=α(T3-W1),α在[0.5,1.5]范围内; 第三驱动电流相对外同步信号时延T3=δ(t-W3),t为延时设置值,δ在[0.5,1.5]范围内。 附图说明 图1为本申请提供的一种全自动稳定控制的被动调Q激光器的示意性结构图。 图2为本申请提供的一种泵浦驱动源电路的示意性结构图。 图3为本申请提供的一种泵浦驱动源电路的电流参数示意图。 具体实施方式 下面结合附图和具体实施例对本申请作进一步详细的描述。 图1为本申请提供的一种全自动稳定控制的被动调Q激光器的示意性结构图。调Q激光器可以包括泵浦LD(激光二极管,laser diode)1、泵浦温度控制装置2、激光增益介质3、被动调Q晶体4、晶体温度控制装置5、输出镜6、耦合透镜7、光纤分束器8、光电探测器9和激光器驱动源10。 激光增益介质3、被动调Q晶体4、输出镜6从左到右依次排列组成激光谐振腔,用于吸收并放大泵浦LD1所输出能量,产生并输出被动调Q激光器的光脉冲。激光谐振腔可以采用直腔、折叠腔或环形腔。在一个实施例中,激光谐振腔采用直腔,腔长尽量短。 在一些实施例中,泵浦LD1可以采用脉冲驱动方式,泵浦LD1的波长可以为808nm;激光增益介质3可以选择Nd:YAG晶体;被动调Q晶体4可以选择Cr 泵浦温度控制装置2选用精密热敏电阻,用于检测泵浦LD1的温度变化,并配合泵浦温度控制电路15实现泵浦LD1温度控制稳定在20℃左右。 晶体温度控制装置5选用精密热敏电阻,用于检测被动调Q晶体4的温度变化,并配合晶体温度控制电路16实现被动调Q晶体4温度控制稳定在20℃左右。 耦合透镜7可以设置在泵浦LD1发出激光的传播方向上,用于将输出镜6输出激光耦合到光纤分束器8中。耦合透镜7可以选择f=50mm的平凸透镜。 光纤分束器8用于将输出激光分为输出光和反馈光两部分,反馈光接入光电探测器9中。 光电探测器9可以用于实时监测光纤分束器8分得的光信号,转化为电信号,反馈给激光器驱动源10中。光电探测器9可以采用APD或PIN管,将接收到的光脉冲信号转化为电脉冲信号,然后通过延时测量电路11和单脉冲能量测量电路12转换为激光器出光时延和能量值,反馈给激光器驱动源10的控制电路。激光器驱动源10的控制电路可以采用FPGA或DSP芯片,通过编写程序和算法,实现激光器自动稳定控制。 如图1所示,激光器驱动源10可以包括延时测量电路11、单脉冲能量测量电路12、泵浦驱动源控制电路13、泵浦驱动源电路14、泵浦温度控制电路15、晶体温度控制电路16,用于产生被动调Q激光器中泵浦LD1的驱动电信号和实现激光器内部温度控制。 延时测量电路11用于将光电探测器9实时监测得到的波形和外部同步信号作比较,转化为激光器出光时延,反馈给泵浦驱动源控制电路13。 单脉冲能量测量电路12用于将光电探测器9实时监测得到的波形测量峰值,转化为激光器能量值,反馈给泵浦驱动源控制电路13。 泵浦驱动源控制电路13用于接收延时测量电路11和单脉冲能量测量电路12转换的激光器出光时延和能量值,以及泵浦温度控制电路15和晶体温度控制电路16分别反馈的泵浦LD1温度值和被动调Q晶体4温度值,通过计算之后与设置值作比较,用以控制泵浦驱动源电路14各参数,使激光器重复频率、出光时刻和能量自动稳定控制。 泵浦驱动源电路14用于接收泵浦驱动源控制电路13输出的驱动信号和时序信号,产生泵浦LD1稳定工作所需的信号。 泵浦温度控制电路15用于接收泵浦温度控制装置2输出的温度信号,依据泵浦温度设置值、激光器出光时延和能量值的方差,输出控制信号驱动泵浦温度控制装置2内部TEC器件,达到泵浦温度稳定控制。 晶体温度控制电路16用于接收晶体温度控制装置5输出的温度信号,依据晶体温度设置值、激光器出光时延和能量值的方差,输出控制信号驱动晶体温度控制装置5内部TEC器件,达到晶体温度稳定控制。 在一些实施例中,泵浦温度控制电路15和晶体温度控制电路16,控温精度优于0.1℃。 在一些实施例中,泵浦驱动源控制电路13的主要部分、泵浦温度控制电路15和晶体温度控制电路16,这三部分电路可以设计在同一块FPGA芯片上,泵浦温度控制电路15和晶体温度控制电路16可以采用数字PID算法控制。控制芯片可以采用单片机、FPGA或DSP,以及两种芯片的组合。 如图2所示,泵浦驱动源电路14包括第一驱动电路2-1、第二驱动电路2-2和第三驱动电流2-3;其中,第一驱动电路2-1输出的第一驱动电流I1、第二驱动电路2-2输出的第二驱动电流I2和第三驱动电路2-3输出的第三驱动电流I3叠加,得到用于驱动泵浦LD1的电流。 如图3所示,第一驱动电流I1为一路恒流源电路,其控制参数包括:电流值I1、相对外同步信号时延T1和时序控制信号脉宽W1,其中电流值I1 如图3所示,第二驱动电流I2为一路恒流源电路,其控制参数包括:电流值I2和时序控制信号脉宽W2,其中:电流值I2 在一些实施例中,第二驱动电路时序控制信号电路可以是在第一驱动电路时序控制信号电路之后接一个反相器,使得第二驱动电流值I2在第一驱动电流值I1作用时停止工作,采用此种控制信号既可以简化电路,也可以缩短转换时间。 如图3所示,第三驱动电流I3为一路窄脉冲恒流源电路,其控制参数包括电流值I3(I3在2-10A范围可调,调整精度0.1A)、相对外同步信号时延T3(T3在10-200us范围可调)和脉宽W3(W3在50-200us范围可调)。 在一些实施例中,第三驱动电流I3的恒流窄脉冲信号可以采用电容放电电路产生,放电电路采用的开关管可以是MOS或IGBT,用来放大反馈电流和控制开关管的运算放大器采用高速双电源运算放大器,以缩短脉冲信号的上升和下降时间。 结合图1至图3,本申请实施例还提供一种全自动稳定控制的被动调Q激光器的控制方法,步骤如下。 a.泵浦驱动源控制电路13接收到外部发送的重复频率f、出光时延t和能量设置值g,以及泵浦温度控制电路15和晶体温度控制电路16反馈的泵浦LD1温度值和被动调Q晶体4温度值,依据设置值和当前温度调用系统默认值,其中第一驱动电流时序控制信号脉宽W1、第三驱动电流值I3和第三驱动电流脉宽W3取对应范围中的默认值。 在一个实施例中,重复频率f为设置值1kHz,周期T=1/f=1ms,当第一驱动电流值I1=0.5ITH=1A时,第二驱动电流值I2=0,第三驱动电流相对外同步信号时延T3=δ(t-W3),t为延时设置值,δ在[0.5,1.5]范围内,第一驱动电流相对外同步信号时延T1=α(T3-W1),α在[0.5,1.5]范围内。 b.泵浦驱动源控制电路13接收到外部发送的模式控制信号,进入出光模式。 c.检查泵浦驱动源控制电路13接收到的泵浦温度控制电路15和晶体温度控制电路16反馈的泵浦LD1和被动调Q晶体4温度稳定在±0.1℃范围内,依据单脉冲能量测量电路12转换的激光器能量值稳定激光器重复频率并确定能量调整基准。 计算发射N次光脉冲能量峰值的平均值与设置值作比较,N的数值决定于激光重复频率大小。计算N次光脉冲能量峰值的平均值的方法,可以使用数字电路算法。若光脉冲能量平均值在能量设置值的±5%范围内,则确定为无子脉冲或无脉冲情况,则此时的第三驱动电流值I3和第三驱动电流脉宽W3为最优值,若光脉冲能量平均值大于能量设置值的105%范围内,则降低第三驱动电流值I3和第三驱动电流脉宽W3;若光脉冲能量平均值小于能量设置值的95%范围内,则增加第三驱动电流值I3和第三驱动电流脉宽W3,依次调整,保证一个周期内只发出一个与能量设置值接近的光脉冲,且第三驱动电流值I3和第三驱动电流脉宽W3为最优值。 d.泵浦驱动源控制电路13接收延时测量电路11转换的激光器出光时延,与设置值作比较得到Δt,第三驱动电流相对外同步信号时延调整量ΔT3=βΔt,使激光器出光时延稳定在出光时延设置值的±5%范围内,再按照初始步进0.1A/s逐步升高第一驱动电流值I1,并按照之后的每一秒内出光时延抖动量对步进进行加权,同时对多次测量结果进行拟合,计算出第一驱动电流值I1最优值,使第一驱动电流值I1在小于泵浦LD阈值电流ITH范围内合适值,激光器出光时延稳定在关于出光时延设置值的±1%范围内抖动。 e.泵浦驱动源控制电路13依据单脉冲能量测量电路12转换的激光器能量值稳定激光能量,按照初始步进0.1A/s逐步升高第二驱动电流值I2,并按照之后的每一秒内出光能量抖动量对步进进行加权,同时对多次测量结果进行拟合,计算出I2最优值,使I2在小于泵浦LD阈值电流ITH范围内合适值,激光器出光能量稳定在关于出光能量设置值的±1%范围内抖动。 由于光学器件自身性能不稳定,被动调Q脉冲激光器输出的重复频率不稳定,时延和能量也会发生抖动。通过先粗调整能量,同时稳定重复频率,然后粗调整时延精度,再精调整时延精度,最后精调整能量精度的方式,有利于在能量处于合理范围内调整时延,并可以避免时延抖动对能量精细调整的影响。按照第三驱动电流值I3、第一驱动电流I1、第二驱动电流I2的顺序调整,从而按照对重复频率、时延、能量的综合影响程度进行调整,有利于提高被动调Q激光器的稳定性和控制效率。 本发明虽然以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以做出可能的变动和修改,因此,本发明的保护范围应当以本发明权利要求所界定的范围为准。
- 一种基于被动调Q激光器泵浦光触发的LIBS系统
- 一种确定被动调Q固体激光器中饱和吸收体位置实现锁定脉冲重复频率的方法
- 一种自稳定被动调Q激光器
- 一种自稳定被动调Q激光器