无人机摄像系统及无人机
文献发布时间:2023-06-19 19:40:14
技术领域
本申请涉及摄像技术领域,尤其涉及一种无人机摄像系统及无人机。
背景技术
现有的无人机、无人车和很多智能机器人产品中普遍使用摄像头作为视觉感知传感器。为了保证系统的可靠性和功能的可拓展性,通常会设置多处理器系统。现有的摄像头MIPI CSI-2输出接口为标准的点对点高速串行接口,这样会导致无法满足多处理器系统的需求。
发明内容
本申请提供了一种无人机摄像系统及无人机,以解决现有技术中摄像头MIPICSI-2输出接口无法满足多处理器系统的技术问题。
本申请实施例提供了一种无人机摄像系统,包括摄像机,所述摄像机上设置有MIPI CSI-2输出接口,其中,所述无人机摄像系统还包括电路组件,所述电路组件包括:
基板,所述基板上设置有输入接口,与所述MIPI CSI-2输出接口信号连接;
中继器,设置在所述基板上,且所述中继器与所述输入接口连接;
所述中继器还用于连接两个以上的处理器。
在一种可能的实现方式中,所述中继器为两个以上;
所述基板上形成有走线;
两个以上的所述中继器通过所述走线分别与所述输入接口连接。
在一种可能的实现方式中,所述中继器为两个;
所述走线包括第一支线、第二支线和第三支线;
所述第一支线的第一端连接于所述输入接口;
所述第一支线的第二端分别通过所述第二支线和所述第三支线连接所述中继器。
在一种可能的实现方式中,所述第一支线的长度小于或等于80mm。
在一种可能的实现方式中,所述第二支线和/或所述第三支线的长度小于或等于2mm。
在一种可能的实现方式中,两个所述中继器位于所述基板的同一侧。
在一种可能的实现方式中,两个所述中继器分别位于所述基板的沿厚度方向的相对两侧。
在一种可能的实现方式中,沿所述基板的厚度方向,两个所述中继器的投影重合。
在一种可能的实现方式中,所述基板上设置有金属过孔,两个所述中继器之间相对应的引脚通过所述金属过孔连接。
在一种可能的实现方式中,所述金属过孔的中心与所述中继器的引脚之间的距离小于1mm。
在一种可能的实现方式中,所述基板上形成有引出线;
所述中继器通过所述引出线连接所述处理器。
在一种可能的实现方式中,所述输入接口为点对点高速串行接口。
本申请实施例还提供了一种无人机,其中,包括上述任一项所述的无人机摄像系统。
本申请实施例提供的无人机摄像系统及无人机中,摄像机采集的视频信号通过中继器传输到处理器,中继器起到中继和桥接作用,能够对视频信号进行完整的保护,各个处理器能够同时稳定地接收相同的图像数据,对于无人机这种小型设备而言,无需对MIPICSI-2输出接口进行转换,能够实现更低的传输延迟,而且其硬件结构实现简单,集成度更高。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。
附图说明
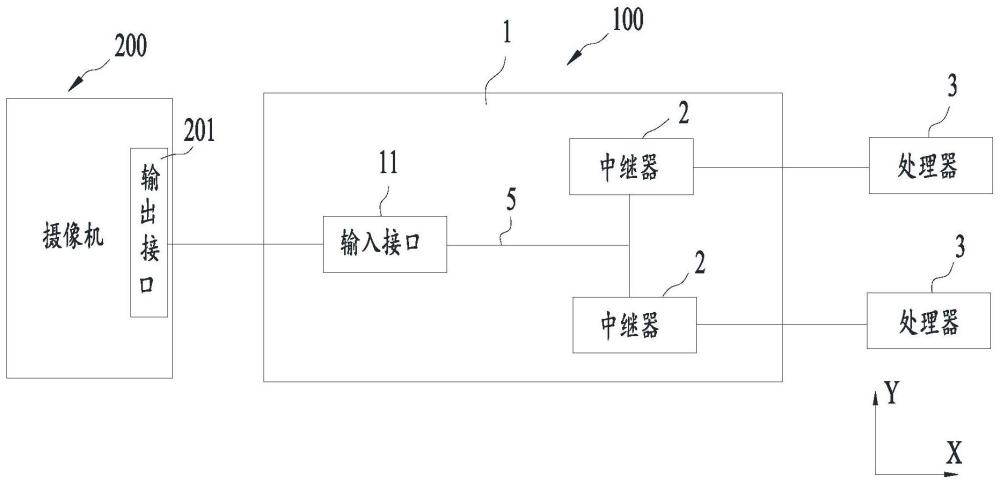
图1是本申请实施例提供的无人机摄像系统的示意图;
图2是本申请一种实施例提供的无人机摄像系统中电路组件的示意图;
图3是本申请另一种实施例提供的无人机摄像系统中电路组件的示意图;
图4是本申请再一种实施例提供的无人机摄像系统中电路组件的示意图。
附图标记:
100-电路组件;1-基板;11-输入接口;2-中继器;3-处理器;4-连接器;5-走线;51-第一支线;52-第二支线;53-第三支线;6-金属过孔;7-引出线;200-摄像机;201-MIPI CSI-2输出接口。
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施例,并与说明书一起用于解释本申请的原理。
具体实施方式
为了更好的理解本申请的技术方案,下面结合附图对本申请实施例进行详细描述。
现有的摄像头MIPI CSI-2输出接口为标准的点对点高速串行接口,针对多个处理器需要同时采集同一个摄像头图像数据的需求,可以采用以下几个方案来解决:
1、采用具有并行接口的摄像头,利用并行接口进行信号分离,进而可以连接多个处理器。但是,并行接口的速率低,无法适配高分辨率的摄像头,不具有普遍的适用性。
2、采用桥接芯片将摄像头的串行接口,例如MIPI CSI-2接口,转为高速数字视频接口,例如FPD-Link接口;或者转为低电压差分信号接口,例如LVDS接口,再利用专用芯片实现分离。处理器接收时还需要再采用桥接芯片将上述FPD-Link接口或LVDS接口转换至MIPI CSI-2接口。该方案在硬件的实现上需要多重转接,相对复杂,其不利于集成,无法满足小型设备,例如无人机的高集成度要求。
3、利用可编程逻辑门阵列(Field Programmable Gate Array,FPGA)对摄像头的数据进行分离,但是FPGA的开发难度较高,针对不同的摄像头和摄像头图像的规格,需要有针对性地进行适配和调试,不具有通用性。硬件生产需要增加FPGA固件下载环节,摄像头更换或图像规格更新也需要对FPGA固件进行更新,其操作流程相对复杂。
此外,上述方案中,对接口标准的转换或桥接,在具体实现时,通常需要对MIPICSI-2协议的数据包进行解析并重新打包发送,这个过程中容易引入难以发现的错误,时序的精准性和一致性也容易被影响,方案的兼容性和稳定性较差。
本申请实施例提供电路组件能够解决上述技术问题。
图1是本申请实施例提供的无人机摄像系统的示意图,如图1所示,本申请实施例提供了一种无人机摄像系统,应用于无人机。该无人机摄像系统包括摄像机200,摄像机200上设置有MIPI CSI-2输出接口201,本实施例中,该MIPI CSI-2输出接口201是一个标准的点对点高速串行接口。通过MIPI CSI-2输出接口201将视频信号传输到处理器3进行视频信号处理。
无人机摄像系统还包括电路组件100,该电路组件100包括基板1和中继器2。其中,基板1上设置有输入接口11,与MIPI CSI-2输出接口201信号连接。中继器2设置在基板1上,且中继器2与输入接口11连接,中继器2还用于连接两个以上的处理器3。
摄像机200采集的视频信号通过中继器2传输到处理器3,中继器2起到中继和桥接作用,能够对视频信号进行完整的保护,各个处理器3能够同时稳定地接收相同的图像数据,对于无人机这种小型设备而言,无需对MIPI CSI-2输出接口201进行转换,能够实现更低的传输延迟,而且其硬件结构实现简单,集成度更高。
请继续参照图1,在一种具体的实施方式中,中继器2为两个以上,基板1上形成有走线5。上述两个以上的中继器2通过走线5分别与输入接口11连接。为了实现对摄像机200与两个以上处理器3的信号连接,可以在各个连接路线中设置上述中继器2。另外,可以在基板1上直接加工形成走线5,来实现信号传输。直接在基板1上形成走线5的加工工艺更容易实现。
图2是本申请一种实施例提供的无人机摄像系统中电路组件的示意图,如图2所示,在一种具体的实施方式中,中继器2为两个,走线5包括第一支线51、第二支线52和第三支线53。其中,第一支线51的第一端连接于输入接口11,第一支线51的第二端分别通过第二支线52和第三支线53连接中继器2。从图2中可以看出,OA段为第一支线51,OB段为第二支线52,OC段为第三支线53,走线5在O点形成分叉。
将走线5设置为多条支线,以形成分叉结构,中继器2的能够补偿走线分叉对信号带来的影响,以保证走线5分叉后的信号能够被正确接收,两个处理器3可以长时间稳定收图,无错帧和丢帧,图像准确且同步。此外,中继器2将输入侧(摄像机200到中继器2)和输出侧(中继器2到处理器3)相隔离,在输出侧能够单独设定驱动能力,输出侧不会受到输入侧的影响。另外,第一支线51、第二支线52和第三支线53可以分布成T字形,且第二支线52和第三支线53对称布置,以使各支线的长度更短。
具体地,在本实施中,两个中继器2沿基板1的宽度方向Y布置,且中继器2可以与输入接口11沿基板的长度方向X布置。
在一种具体的实施方式中,第一支线51的长度小于或等于80mm。本实施例中,设置输入接口11与中继器分叉点O的距离尽可能小,即,OA≤80mm,该距离还能够使分叉点O尽量地靠近中继器2的位置,以保证分叉后的距离尽量小,那么信号反射带来的影响也就越小。
此外,还可以设置第二支线52和/或第三支线53的长度小于或等于2mm,即,OB≤2mm,和/或,OC≤2mm。分叉点O到中继器2的距离较小,从而保证了信号传输的准确性。
上述中继器2在基板1上的布置方式有多种,如图2所示,在一种实现方式中,根据电路组件100上其他元件的分布设计,可以设置两个中继器2位于基板1的同一侧。在基板1的同侧,两个中继器2可以并排放置,且这样放置后,两个中继器2之间的走线5可以设计的较短。图2所示的实施例中,两个中继器2沿着基板1的宽度方向Y布置。
图3是本申请另一种实施例提供的无人机摄像系统中电路组件的示意图,如图3所示,在该实施例中,两个中继器2分别位于基板1的沿厚度方向Z的相对两侧。也就是说,在图3所示的实施例中,两个中继器2分布在基板1的正反两面。优选地,沿基板1的厚度方向,两个中继器2的投影重合。这样的分布方式,能够使得相同功能的引脚在空间上的距离更近,信号分开后经过非常短的走线就可以连接到芯片的引脚。
图4是本申请再一种实施例提供的无人机摄像系统中电路组件的示意图。在其他的实施例中,如图4所示,该电路组件是双层电路板,两个中继器2分布在基板1的正反两面,二者在基板1的厚度方向上的投影不重合。为了图示更清楚,在图4中,两个中继器2均已示出,实际上,两个中继器2分别位于基板1的正反两面,位于基板1上的连接器4用于与摄像机200的MIPI CSI-2输出接口201相连。本实施例中,连接器4的右侧具有6个输入接口11,每个输入接口11均通过形成在基板1上走线5连接到中继器2上。在基板1上形成有金属过孔6,位于基板1正反两面的两个中继器2之间相对应的引脚可以通过金属过孔6连接。
上述金属过孔6形成在两个中继器2的中间位置,在金属过孔6的位置形成信号分叉,在一种具体的实施方式中,金属过孔6的中心与中继器2的引脚之间的距离小于1mm,以使信号分开后经过的走线长度较短。
请继续参照图4,在一种具体的实施方式中,基板1上形成有引出线7,中继器2通过引出线7连接处理器3。本实施例中,连接器4对应6个输入接口11,各输入接口11均分别通过引出线7连接至处理器3。引出线7直接形成于基板1,以进一步简化电路组件100的结构和加工过程。
本申请实施例还提供了一种无人机,其包括本申请任意实施例提供的无人机摄像系统。
本申请实施例提供的无人机中,在多处理器硬件平台上实现摄像机的输出信号分离,对于两个以上的处理器而言,可以同时采集同一颗摄像头输出的数据,不同的处理器能够得到同一时刻的图像数据,对实时性要求较高的算法更加友好。
需要指出的是,本专利申请文件的一部分包含受著作权保护的内容。除了对专利局的专利文件或记录的专利文档内容制作副本以外,著作权人保留著作权。
- 无人机、灭火无人机及采用该灭火无人机的消防灭火系统
- 无人机高精度双摄像头倾斜摄影测量系统
- 无人机摄像头、无人机遥控器及无人机
- 无人机摄像系统及无人机