基于相对对象检测的伺服制动系统
文献发布时间:2023-07-07 06:30:04
技术领域
本发明涉及伺服制动领域,尤其涉及一种基于相对对象检测的伺服制动系统。
背景技术
兼用人力和发动机动力作为制动能源的制动系统,该制动系统是在人力液压制动系统的基础上加设一套动力伺服系统而形成的。在正常情况下,制动能量大部分由动力伺服系统供给,而在动力伺服系统失效时,还可以完全依靠驾驶员供给。
按伺服系统输出力的作用部位和对其控制装置操纵方式的不同,伺服制动系统可分为助力式和增压式两类。
助力式又称直接操纵式,其特点是伺服系统控制装置即控制阀用制动踏板机构直接操纵,真空伺服气室产生的助力与踏板力共同作用于制动主缸,以助踏板力之不足。乘用车普遍采用真空助力伺服制动系统。
增压式又称间接操纵式,其特点是控制阀用制动踏板机构通过主缸输出的液压操纵,且伺服系统的输出力与主缸液压共同作用于辅助缸,使辅助缸输出到制动轮缸的液压远高于制动主缸的液压。
其中核心部件真空助力器的工作过程是:在非工作的状态下,控制阀推杆回位弹簧将控制阀推杆推到右边的锁片锁定位置,真空单向阀口处于开启状态,控制阀弹簧使控制阀皮碗与空气阀座紧密接触,从而关闭了空气阀口。此时真空助力器的真空气室和应用气室分别通过活塞体的真空气室通道与应用气室通道经控制阀腔处相通,并与外界大气相隔绝。发动机起动后,发动机的进气歧管处的真空度上升,随之,真空助力器的真空气室、应用气室的真空度均上升,并处于随时工作的准备状态。
当进行制动时,踩下制动踏板,踏板力经杠杆放大后作用在控制阀推杆上。首先,控制阀推杆回位弹簧被压缩,控制阀推杆连同空气阀柱往前移。当控制阀推杆前移到控制阀皮碗与真空单向阀座相接触的位置时,真空单向阀口关闭。此时,助力器的真空气室、应用气室被隔开。此时,空气阀柱端部刚好与反作用盘的表面相接触。随着控制阀推杆的继续前移,空气阀口将开启。外界空气经过滤气后通过打开的空气阀口及通往应用气室的通道,进入到助力器的应用气室(右气室),伺服力产生。由于反作用盘的材质(橡胶件)有受力表面各处的单位压强相等的物理属性要求,使得伺服力随着控制阀推杆输入力的逐渐增加而成固定比例(伺服力比)增长。由于伺服力资源的有限性,当达到最大伺服力时,即应用气室的真空度为零时(即一个标准大气压),伺服力将成为一个常量,不再发生变化。此时,助力器的输入力与输出力将等量增长;取消制动时,随着输入力的减小,控制阀推杆后移,真空单向阀口开启后,助力器的真空气室、应用气室相通,伺服力减小,活塞体后移。就这样随着输入力的逐渐减小,伺服力也将成固定比例(伺服力比)的减少,直至制动被完全解除。
目前,汽车刹车机构是关系到车辆安全性能的主要部件,各大汽车厂商对汽车刹车机构的研究一般集中在如何提升刹车机构的整体刹车性能,如何使得刹车机构内部结构紧凑化和可靠化,然而,对汽车刹车机构的刹车的时机缺乏足够的关注,刹车的触发仍严重依赖于驾驶员的人工操控。
发明内容
为此,本发明至少需要具有以下两个关键的发明点:
(1)引入包括空气压缩机、总风缸、调压阀、制动阀、制动管、三通阀、副风缸、闸瓦、制动缸、制动缸活塞杆、制动缸弹簧、制动缸活塞以及自动触发机构的针对性设计的伺服制动结构,用于触发对所在汽车的自动刹车操作,所述自动触发机构基于接收到的控制信号决定是否通过压缩所述空气压缩机内的气体以触发所述自动刹车操作;
(2)在现场检测到的图像中央区域内存在面积超限的汽车前脸对象时,判断存在同一车道的相对行驶且距离较近的汽车对象,进而自动触发制动操作以避免撞击事故发生。
根据本发明的一方面,提供了一种基于相对对象检测的伺服制动系统,所述系统包括:
伺服制动结构,包括空气压缩机、总风缸、调压阀、制动阀、制动管、三通阀、副风缸、闸瓦、制动缸、制动缸活塞杆、制动缸弹簧、制动缸活塞以及自动触发机构;
其中,在所述伺服制动结构中,所述总风缸分别与所述空气压缩机和所述调压阀连接。
更具体地,在所述基于相对对象检测的伺服制动系统中:
在所述伺服制动结构中,所述调压阀设置在所述制动阀和所述总风缸之间的连接管道上。
更具体地,在所述基于相对对象检测的伺服制动系统中:
在所述伺服制动结构中,所述制动管与所述制动阀连通,所述三通阀的三端分别连接所述制动管、所述副风缸和所述制动缸。
更具体地,在所述基于相对对象检测的伺服制动系统中,还包括:
超清成像器件,用于对所述伺服制动结构所在汽车的前方执行超清成像操作,以获得对应的超清捕获图像;
一层执行器件,设置在所述伺服制动结构所在汽车内,与所述超清成像器件连接,用于对接收到的超清捕获图像执行应用空域的图像增强操作,以获得一层执行图像;
二层执行器件,与所述一层执行器件连接,用于对接收到的一层执行图像执行引导滤波操作,以获得二层执行图像;
三层执行器件,与所述二层执行器件连接,用于对接收到的二层执行图像执行最近邻插值操作,以获得三层执行图像;
信号鉴定机构,与所述三层执行器件连接,用于将所述三层执行图像中各个像素列中位于中间位置的多个像素列构成的图像区域作为待分析区域从所述三层执行图像中剥离出来;
特征检测机构,与所述信号鉴定机构连接,用于在所述待分析区域中执行汽车前脸对象的检测处理,并在存在某一汽车前脸对象占据所述三层执行图像的面积百分比超限时,发出相对车辆逼近信号;
其中,所述自动触发机构还与所述特征检测机构连接,用于在接收到相对车辆逼近信号时,触发所述伺服制动结构的自动刹车操作;
其中,所述自动触发机构与所述空气压缩机连接,用于触发所述伺服制动结构的自动刹车操作;
其中,所述自动触发机构与所述空气压缩机连接,用于触发所述伺服制动结构的自动刹车操作包括:所述自动触发机构基于接收到的控制信号决定是否通过压缩所述空气压缩机内的气体以触发所述伺服制动结构的自动刹车操作;
其中,在所述待分析区域中执行汽车前脸对象的检测处理,并在存在某一汽车前脸对象占据所述三层执行图像的面积百分比超限时,发出相对车辆逼近信号包括:基于各种汽车的前脸几何形状在所述待分析区域中执行汽车前脸对象的检测处理,并在存在某一汽车前脸对象占据所述三层执行图像的面积百分比超限时,发出相对车辆逼近信号。
本发明的基于相对对象检测的伺服制动系统应用广泛、安全可靠。由于能够在定制刹车机构的基础上基于对向行驶汽车的接近程度完成对刹车时机的电子选择,从而有效规避了恶劣的撞击事故。
附图说明
以下将结合附图对本发明的实施方案进行描述,其中:
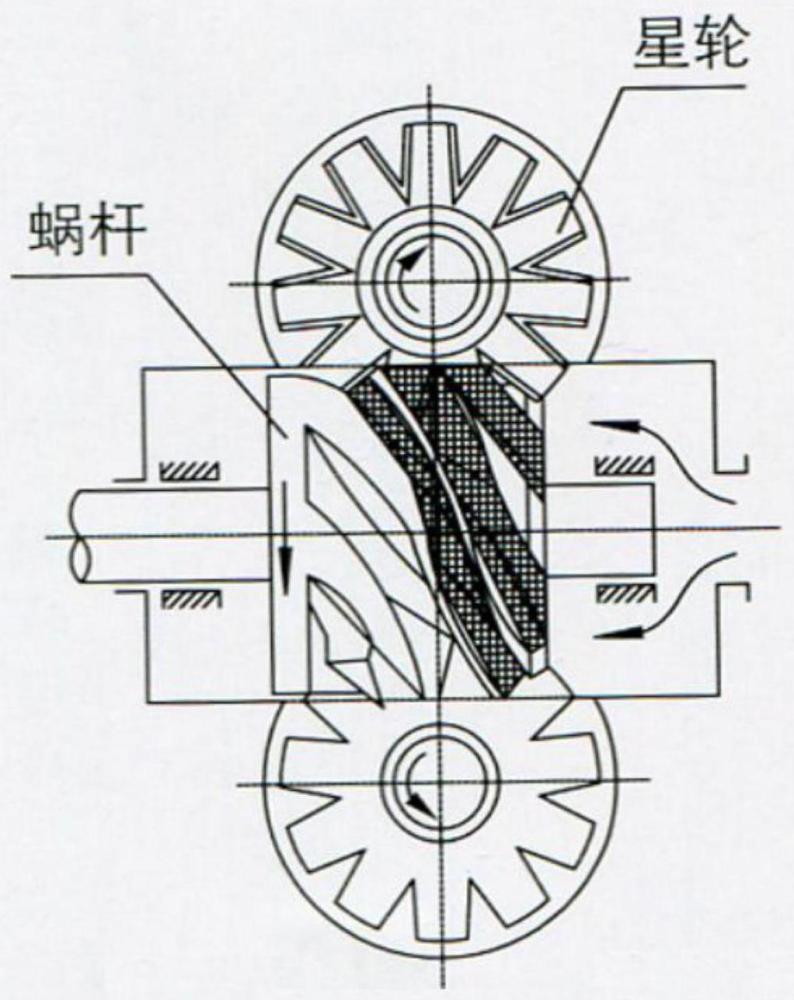
图1为根据本发明实施方案示出的基于相对对象检测的伺服制动系统的空气压缩机的内部结构图。
具体实施方式
下面将参照附图对本发明的基于相对对象检测的伺服制动系统的实施方案进行详细说明。
自动驾驶汽车能够促使人们拼车,极大的减少汽车的使用,创造“明天的高速公路火车”。这些高速公路火车能减少能源消耗,增加主要道路的运力。在节约时间方面,美国交通运输部估计,每一工作日,人们平均花费52分钟在上下班路上。未来,人们可以以更有效率的方式使用这些时间。
汽车自动驾驶技术包括视频摄像头、雷达传感器以及激光测距器来了解周围的交通状况,并通过一个详尽的地图对前方的道路进行导航。这一切都通过一些公司的数据中心来实现,数据中心能处理汽车收集的有关周围地形的大量信息。就这点而言,自动驾驶汽车相当于数据中心的遥控汽车或者智能汽车。
目前,汽车刹车机构是关系到车辆安全性能的主要部件,各大汽车厂商对汽车刹车机构的研究一般集中在如何提升刹车机构的整体刹车性能,如何使得刹车机构内部结构紧凑化和可靠化,然而,对汽车刹车机构的刹车的时机缺乏足够的关注,刹车的触发仍严重依赖于驾驶员的人工操控。
为了克服上述不足,本发明搭建了一种基于相对对象检测的伺服制动系统,能够有效解决相应的技术问题。
根据本发明实施方案示出的基于相对对象检测的伺服制动系统包括:
伺服制动结构,包括空气压缩机、总风缸、调压阀、制动阀、制动管、三通阀、副风缸、闸瓦、制动缸、制动缸活塞杆、制动缸弹簧、制动缸活塞以及自动触发机构,所述空气压缩机的内部结构如图1所示;
其中,在所述伺服制动结构中,所述总风缸分别与所述空气压缩机和所述调压阀连接。
接着,继续对本发明的基于相对对象检测的伺服制动系统的具体结构进行进一步的说明。
在所述基于相对对象检测的伺服制动系统中:
在所述伺服制动结构中,所述调压阀设置在所述制动阀和所述总风缸之间的连接管道上。
在所述基于相对对象检测的伺服制动系统中:
在所述伺服制动结构中,所述制动管与所述制动阀连通,所述三通阀的三端分别连接所述制动管、所述副风缸和所述制动缸。
在所述基于相对对象检测的伺服制动系统中,还包括:
超清成像器件,用于对所述伺服制动结构所在汽车的前方执行超清成像操作,以获得对应的超清捕获图像;
一层执行器件,设置在所述伺服制动结构所在汽车内,与所述超清成像器件连接,用于对接收到的超清捕获图像执行应用空域的图像增强操作,以获得一层执行图像;
二层执行器件,与所述一层执行器件连接,用于对接收到的一层执行图像执行引导滤波操作,以获得二层执行图像;
三层执行器件,与所述二层执行器件连接,用于对接收到的二层执行图像执行最近邻插值操作,以获得三层执行图像;
信号鉴定机构,与所述三层执行器件连接,用于将所述三层执行图像中各个像素列中位于中间位置的多个像素列构成的图像区域作为待分析区域从所述三层执行图像中剥离出来;
特征检测机构,与所述信号鉴定机构连接,用于在所述待分析区域中执行汽车前脸对象的检测处理,并在存在某一汽车前脸对象占据所述三层执行图像的面积百分比超限时,发出相对车辆逼近信号;
其中,所述自动触发机构还与所述特征检测机构连接,用于在接收到相对车辆逼近信号时,触发所述伺服制动结构的自动刹车操作;
其中,所述自动触发机构与所述空气压缩机连接,用于触发所述伺服制动结构的自动刹车操作;
其中,所述自动触发机构与所述空气压缩机连接,用于触发所述伺服制动结构的自动刹车操作包括:所述自动触发机构基于接收到的控制信号决定是否通过压缩所述空气压缩机内的气体以触发所述伺服制动结构的自动刹车操作;
其中,在所述待分析区域中执行汽车前脸对象的检测处理,并在存在某一汽车前脸对象占据所述三层执行图像的面积百分比超限时,发出相对车辆逼近信号包括:基于各种汽车的前脸几何形状在所述待分析区域中执行汽车前脸对象的检测处理,并在存在某一汽车前脸对象占据所述三层执行图像的面积百分比超限时,发出相对车辆逼近信号。
在所述基于相对对象检测的伺服制动系统中:
所述特征检测机构还用于在不存在某一汽车前脸对象占据所述三层执行图像的面积百分比超限时,发出相对车辆偏远信号。
在所述基于相对对象检测的伺服制动系统中:
所述自动触发机构还用于在接收到相对车辆偏远信号时,停止触发所述伺服制动结构的自动刹车操作。
在所述基于相对对象检测的伺服制动系统中:
所述超清成像器件用于对所述伺服制动结构所在汽车的前方执行超清成像操作,以获得对应的超清捕获图像包括:所述超清成像器件设置在所述汽车前端的中央位置。
在所述基于相对对象检测的伺服制动系统中:
在所述伺服制动结构中,所述闸瓦设置在被制动的车轮的周边,所述制动缸与所述闸瓦连接。
在所述基于相对对象检测的伺服制动系统中:
在所述伺服制动结构中,所述制动缸内设置有所述制动缸弹簧和所述制动缸活塞,所述制动缸活塞杆设置在所述闸瓦和所述制动缸之间。
另外,在所述基于相对对象检测的伺服制动系统中,基于各种汽车的前脸几何形状在所述待分析区域中执行汽车前脸对象的检测处理,并在存在某一汽车前脸对象占据所述三层执行图像的面积百分比超限时,发出相对车辆逼近信号包括:将所述待分析区域中与某一种汽车的前脸几何形状匹配的图像区域作为检测到的汽车前脸对象,以获得所述待分析区域中的一个以上汽车前脸对象。
可不偏离所附权利要求中所定义的本发明的精神和范围,对优选的实施方案进行各种修改。
- 基于检测对象制动车辆的系统和方法
- 基于检测对象制动车辆的系统和方法