一种Delta并联机器人用真空吸具的控制系统及控制方法
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及机器人技术领域,具体地涉及一种Delta并联机器人用真空吸具的控制系统及控制方法。
背景技术
Delta机器人运行速度快,特别适合用于流水线上产品的分拣工序,因此机器人的夹具治具应具有快速响应、吸取牢靠、控制灵活、更换方便等特点。目前Delta机器人使用的吸具大都采用单个真空发生器,由一个电磁阀控制,不够灵活,对于镂空、多孔多槽的平板产品,尤其是对于非几何中心位置开窗的平板产品,这种吸具及使用方法容易造成吸不起、吸不牢、产品甩飞、浪费真空流量等问题,以相同的真空区域应对各种尺寸、形状不同的产品,灵活性差,对于尺寸比吸具面还小的产品,吸具外围可能吸到生产线上的输送带,造成输送带抖动,影响输送带上后续产品的位置,从而使后续产品出现抓不到、抓不准的风险。
发明内容
本发明的目的在于克服现有技术存在的缺点,提出设计一种Delta并联机器人用真空吸具的控制系统及控制方法,够吸取牢靠产品,而且可以依据产品的尺寸、形状对吸具的真空区域进行灵活控制。
本发明解决其技术问题所采取的技术方案是:
一种Delta并联机器人用真空吸具的控制系统,包括真空吸具、电磁阀组、控制器和工业相机;
所述工业相机与控制器连接,用于识别出产品的漏真空的区域,并将识别的信息传输至控制器;
所述控制器IO端与电磁阀组连接,用于控制真空吸具的真空区域,使真空区域覆盖产品的非漏真空区域;
所述真空吸具的供气口通过PU或PV材质的高压气管与电磁阀组输出口连接,用于吸取产品;
所述真空吸具包括两个以上真空发生器,电磁阀组包括两个以上电磁阀,所述控制器设置两路以上IO端口,每路端口分别对应控制一个电磁阀,从而使每个真空发生器单独控制,达到真空区域可控的效果。
进一步的,所述真空吸具包括6个或7个或8个真空发生器。
进一步的,所述控制系统的控制方法,包括:
L1、将真空区域可控的真空吸具安装在Delta机器人底部工装处;在输送带上方设置工业相机;
L2、当产品在输送带上流入工业相机视野并触发工业相机拍照,工业相机识别、判定产品是否为需要抓取的产品:
若不是需要抓取的产品,则不做任何动作;
若是需要抓取的产品,则进行定位,获取产品当前位置信息及尺寸信息,并且获取产品漏真空的区域分布状态,将上述产品信息发送至机器人控制器;
L3、控制器获取工业相机采集的产品信息,使产品中心与真空吸具中心重合,进行区域覆盖匹配,计算真空吸具每个真空区域覆盖下产品的漏真空面积,确定电磁阀组的控制指令信息。
进一步的,步骤L3中,当漏真空面积小于或等于真空吸具单个真空区域面积的50%,则开启该真空区域的真空发生器,同样的计算方法,判断剩余真空区域的漏真空面积,则可以确定电磁阀组的控制指令信息。
进一步的,所述真空吸具包括吸具本体和真空发生器;所述吸具本体内设置若干个空腔,每个空腔内均设置一个真空发生器,每个真空发生器均设置有一个供气口。每个空腔对应一个真空发生器,每个真空发生器可单独控制。
进一步的,所述每个供气口安装有快换插头。
进一步的,所述快换插头位于吸具本体侧面或内部。
进一步的,所述真空发生器安装在安装座上,安装座安装在吸具本体上。
进一步的,所述安装座底面安装有缓冲海棉垫,缓冲海棉垫上开设安装孔二和真空口,真空发生器产生真空,使真空发生器对应区域的缓冲海棉垫真空口产生负压,从而产生吸附力吸取产品。缓冲海棉垫能够保证产品表面不被划伤。
进一步的,所述真空口为十字型,有利于配合产品真空吸附。
本发明的技术效果:
与现有技术相比,本发明的一种Delta并联机器人用真空吸具的控制系统及控制方法,采用工业相机对前端过来的产品进行识别、定位,并且测量出产品的外形尺寸、形状以及孔的分布,相机获取的这些信息发送到机器人控制器,控制器经过分析,得出所需要的真空区域,然后通过控制器的IO端口控制电磁阀组合体,电磁阀组合体直接控制吸具内部的某个或某几个真空发生器开与关,使吸具底面相应的区域产生真空吸附,达到吸取牢靠、可根据产品的尺寸、形状、特征灵活控制吸具的真空区域的目的,还可以避免真空全开造成的真空流量浪费,真空吸附区域能够自动调整,一套吸具可以应对所有产品,而且吸取牢靠,使Delta机器人吸取更加可靠、兼容性更高、智能化程度更高。
附图说明
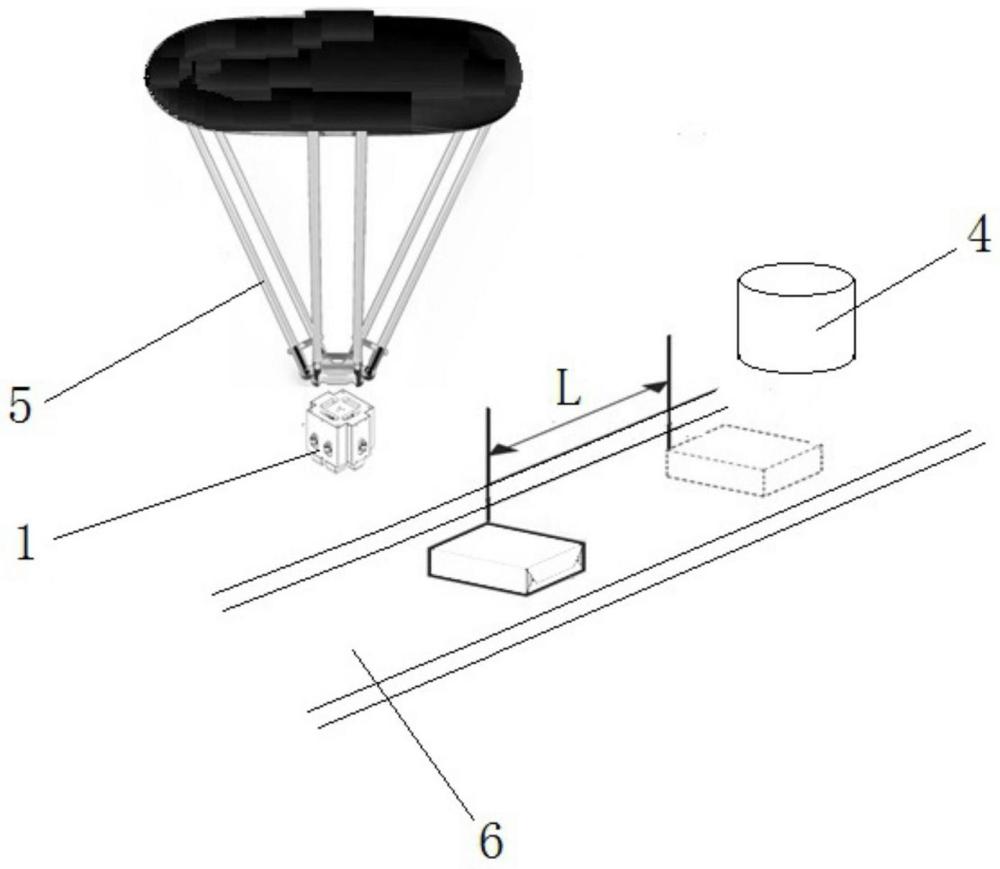
图1为本发明Delta并联机器人用真空吸具的控制系统结构原理图;
图2为本发明Delta并联机器人用真空吸具的控制系统工作原理图;
图3为本发明真空吸具的真空区域分布示意图;
图4为本发明Delta并联机器人用真空吸具的控制方法流程图;
图5为本发明Delta并联机器人用真空吸具立体图;
图6为本发明Delta并联机器人用真空吸具俯视图;
图7为本发明Delta并联机器人用真空吸具仰视图;
图8为本发明Delta并联机器人用真空吸具主视图;
图9为本发明图8的M-M向剖视图。
图中,1、真空吸具;2、电磁阀组;3、控制器;4、工业相机;5、Delta机器人;6、输送带;7、通孔;8、吸具本体;9、供气口;10、快换插头;11、安装座;12、缓冲海棉垫;
A、真空区域一;B、真空区域二;C、真空区域三;D、真空区域四;E、真空区域五;F、真空区域六;G、真空区域七;H、真空区域八;
a、真空发生器一;b、真空发生器二;c、真空发生器三;d、真空发生器四;e、真空发生器五;f、真空发生器六;g、真空发生器七;
801、顶盖;802、外罩;803、底板;804、安装孔一;805、中心孔;1201、安装孔二;1202、真空口;1203、短缓冲棉垫;1204、长缓冲棉垫。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面结合说明书附图,对本发明实施例中的技术方案进行清楚、完整地描述。
实施例1:
如图1和2所示,本实施例涉及的一种Delta并联机器人用真空吸具的控制系统,包括真空吸具1、电磁阀组2、控制器3和工业相机4;所述工业相机4与控制器3连接,用于识别出产品的镂空、孔、槽等漏真空的区域,并将识别的信息传输至控制器3;所述控制器3IO端与电磁阀组2连接,用于控制真空吸具1的真空区域,使真空区域覆盖产品的非漏真空区域;所述真空吸具1的供气口通过PU或PV材质的高压气管与电磁阀组2输出口连接,用于吸取产品;所述真空吸具1包括两个以上真空发生器,电磁阀组2包括两个以上电磁阀,所述控制器3设置两路以上IO端口,每路端口分别对应控制一个电磁阀,从而使每个真空发生器单独控制。
如图3所示,本实施例所述真空吸具1包括8个真空发生器,共分为8个真空区域:真空区域一A、真空区域二B、真空区域三C、真空区域四D、真空区域五E、真空区域六F、真空区域七G、真空区域八H。
如图4所示,所述控制系统的控制方法,包括:
L1、将真空区域可控的真空吸具1安装在Delta机器人5底部工装处;在输送带6上方设置工业相机4;
L2、当产品从输送带6前端流入工业相机4视野并触发工业相机4拍照,工业相机4识别、判定产品是否为需要抓取的产品:
若不是需要抓取的产品,则不做任何动作;
若是需要抓取的产品,则进行定位,获取产品当前位置信息及尺寸信息,并且获取产品镂空、孔、槽等漏真空的分布状态,将上述产品信息发送至机器人控制器3;
L3、控制器3获取工业相机4采集的产品信息,使产品中心与真空吸具1中心重合,进行区域覆盖匹配,计算真空吸具1每个真空区域覆盖下产品的漏真空面积,确定电磁阀组2的控制指令信息,当漏真空面积小于或等于真空吸具1单个真空区域面积的50%,则开启该真空区域的真空发生器,同样的计算方法,判断剩余7个真空区域的漏真空面积,则可以确定电磁阀组2的控制指令信息。
本实施例所述工业相机4视野范围至产品吸取区的距离为L,如图1所示,距离L只要能够保证工业相机4不影响真空吸具1吸取动作的执行即可,可根据实际需求设定。
本发明将真空区域可控的真空吸具1安装在Delta机器人5底部工装处,安装过程中须将真空吸具1的中心孔对准并卡住机器人底部工装的销,以保证真空吸具1的中心与机器人运动部件中心重合。采用PU或PV材质的高压气管连接真空吸具1每个供气口和对应电磁阀的输出口,电磁阀的供气口连接到气源,工业相机4与机器人控制器3通信,机器人控制器3的IO端口连接到电磁阀控制信号,控制器3的IO端口有8路,可以控制真空吸具1的8个真空发生器,即可以控制真空区域的开启或关闭,根据实际需要IO端口可以进行扩展。可在控制器3内预设有真空吸具1每个真空区域的面积。工业相机4拍照后获取产品信息,再经过控制器3分析,发出电磁阀组2的控制指令,控制真空吸具1相应的真空发生器动作,使真空吸具1的真空区域符合产品吸取要求,即覆盖镂空、孔、凹槽部位的真空发生器不打开,非镂空、孔、凹槽部位的真空发生器打开,产生吸附力吸取产品。真空吸具1按照一定规则确定的形状分为8个真空区域,如图4所示,每个真空区域有一个真空发生器产生真空,单个真空区域划分越小,可控灵活性就越高。
实施例2:
本实施例与实施例1不同之处在于:所述真空吸具1包括7个真空发生器。
如图8和9所示,本实施例真空吸具1的具体结构包括吸具本体8和位于吸具本体8内的7个真空发生器,具体的,吸具本体8内设置有7个空腔,每个空腔内均设置一个真空发生器,即真空发生器一a、真空发生器二b、真空发生器三c、真空发生器四d、真空发生器五e、真空发生器六f和真空发生器七g。作为优选布置,所述真空发生器一a设置于吸具本体8中心位置,其他6个真空发生器均布在真空发生器一a的外周。
如图5-8所示,所述吸具本体8包括顶盖801、外罩802和底板803;所述外罩802采用螺钉安装在所述底板803和顶盖801上;所述顶盖801上开设三个安装孔一804,通过安装孔一804与Delta机器人5的工装安装连接;顶盖801中心开设中心孔805,中心孔805对准并卡住机器人底部工装的销,以保证真空吸具1的中心与机器人运动部件中心重合。
如图5和7所示,每个所述真空发生器分别通过对应的安装座11安装在所述底板803上。具体的,所述安装座11安装在底板803上,每个真空发生器安装在对应安装座11的顶面,安装座11的底面安装有缓冲海棉垫12。所述缓冲海棉垫12包括三块短缓冲棉垫1203和两块长缓冲棉垫1204,三块短缓冲棉垫1203分别安装于三个安装座11上,其余四个安装座11平均分成两组,每组安装一个长缓冲棉垫1204。每块缓冲海棉垫12上开设安装孔二1201和十字型真空口1202,真空发生器产生真空,使真空发生器对应区域的缓冲海棉垫12的真空口1202产生负压,从而产生吸附力吸取产品。
如图5所示,每个真空发生器均设置有一个供气口9,所述供气口9具有快换插头10,快换插头10与高压气管连接。其中,位于所述中心位置的真空发生器一a的供气口9位于吸具本体8内部(图中未显示)。位于外周的真空发生器的供气口9位于吸具本体8的侧面,具体的,可在所述外罩802上开设通孔7,所述快换插头10穿过所述通孔7,方便与高压气管连接。
本发明将与产品的接触面设计为细长腰孔,所述缓冲海棉垫12安装于细长腰孔外面,保证产品表面不被划伤,而且海棉的成本低,采用粘贴方式,方便更换,细长腰孔不会被堵塞。
本发明高压气管连接到吸具的快换插头10,当外部压缩空气供气时,高压气流通过快换插头10进入真空发生器,真空发生器产生真空,使真空发生器2对应区域的缓冲海棉垫12真空口1202产生负压,从而产生吸附力吸取产品。本发明所述吸具有7个真空发生器,产生的吸附力相当于目前常用吸具的7倍,而且由控制器3单独控制,即使产品有诸多镂空、凹槽等造成真空漏失,7个真空发生器产生的真空也足以抵消漏失的真空并产生足够的吸附力吸取产品,保证产品吸取的可靠性,使吸具有更高的兼容性。本发明真空吸具1能够根据产品的形状、大小调整吸附面的真空,有效保证产品的牢靠吸取,实际生产的兼容率提高到99%以上。
上述具体实施方式仅是本发明的具体个案,本发明的专利保护范围包括但不限于上述具体实施方式,任何符合本发明权利要求书且任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应落入本发明的专利保护范围。
- 一种工业用双Delta并联机器人结构及控制系统
- 一种工业用双Delta并联机器人结构及控制系统