一种消杀机器人避障方法、系统和设备
文献发布时间:2024-01-17 01:16:56
技术领域
本发明涉及机器人控制技术领域,具体为一种消杀机器人避障方法、系统和设备。
背景技术
公共卫生安全逐渐成为人们关注的热点,像医院、机场、火车站、电影院等人流量密集场所,极易增加细菌和病毒传播的风险,因此公共场所病菌消杀措施的采取,对人类生命安全和健康显得尤为重要。机器人被广泛应用到公共场合消杀工作中,可以代替人类完成一些特定的工作。传统的公共场所手工消毒方式耗费了大量的人力物力,使清洁人员暴露在病毒环境中,增加了感染风险,且这种消毒方式存在消毒杀菌不到位,存有卫生死角等问题。而消杀机器人可以在无人看守的情况下自主完成室内消毒工作,不仅可以有效减少消毒时间,通过高水平消毒模式,还可以减少交叉感染的风险。
但消杀机器人在实际使用的过程当中,避障能力还存在着限制,不能灵活的做出避障决策,造成工作可靠性和效率较低。
发明内容
本发明的目的是提供一种消杀机器人避障方法、系统和设备。
本发明技术方案如下:
一种消杀机器人避障方法,应用于消杀机器人,包括如下操作:
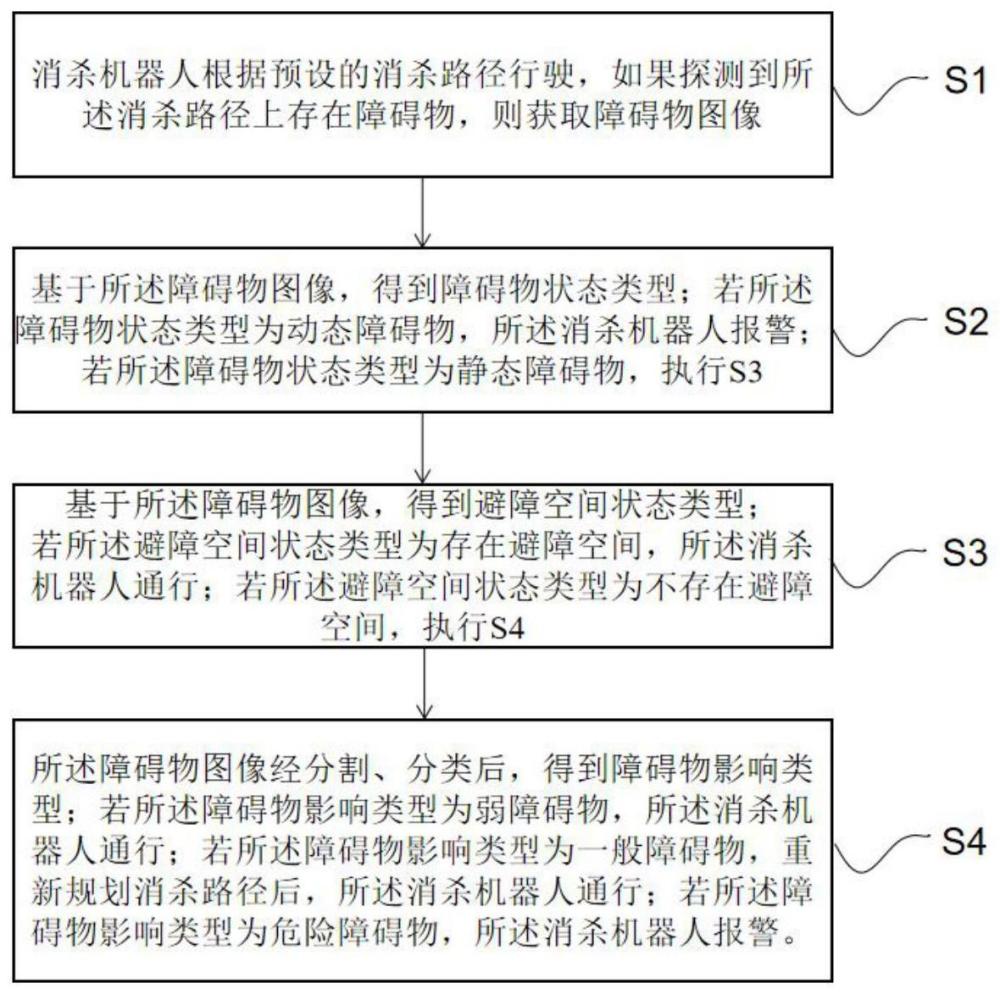
S1消杀机器人根据预设的消杀路径行驶,如果探测到所述消杀路径上存在障碍物,则获取障碍物图像;
S2基于所述障碍物图像,得到障碍物状态类型;
若所述障碍物状态类型为动态障碍物,所述消杀机器人报警;
若所述障碍物状态类型为静态障碍物,执行S3;
S3基于所述障碍物图像,得到避障空间状态类型;
若所述避障空间状态类型为存在避障空间,所述消杀机器人通行;
若所述避障空间状态类型为不存在避障空间,执行S4;
S4所述障碍物图像经分割、分类后,得到障碍物影响类型;
若所述障碍物影响类型为第一类障碍物,所述消杀机器人通行;
若所述障碍物影响类型为第二类障碍物,重新规划消杀路径后,所述消杀机器人通行;
若所述障碍物影响类型为第三类障碍物,所述消杀机器人报警。
如上所述的消杀机器人避障方法,所述S2中得到障碍物状态类型的操作具体为:获取预设采集周期内若干图像,对比所述若干图像中障碍物位置,若所述障碍物位置发生变化,则为动态障碍物,若所述障碍物位置未发生变化,则为静态障碍物。
如上所述的消杀机器人避障方法,所述S3中得到避障空间状态类型的操作具体为:获取消杀机器人图像,经比例换算后与所述障碍物图像融合,得到融合图像,所述融合图像中,若所述消杀机器人与障碍物不接触,则存在所述避障空间;若所述消杀机器人与障碍物接触,则不存在所述避障空间。
如上所述的消杀机器人的避障方法,所述S4中得到障碍物影响类型的操作具体为:所述障碍物图像经特征提取,得到低级空间特征和高级上下文特征,所述低级空间特征和高级上下文特征经融合后,得到分割图像,所述分割图像经分类后,得到所述障碍物影响类型。
其中,所述得到分割图像的操作之后,还包括降损处理所述分割图像,得到精细分割图像,对所述精细分割图像执行所述分类操作。
如上所述的消杀机器人避障方法,所述S3中若所述避障空间状态类型为存在避障空间,所述消杀机器人通行的操作具体为:若避障空间状态类型为存在避障空间,基于所述障碍物图像,得到障碍物影响类型;若所述障碍物影响类型为第一类障碍物,所述消杀机器人速度降至第一速度后通行;若所述障碍物影响类型为第二类障碍物,所述消杀机器人速度降至第二速度后通行;若所述障碍物影响类型为第三类障碍物,所述消杀机器人速度降至第三速度后通行。
如上所述的消杀机器人避障方法,所述S1中消杀机器人发现障碍物的操作通过以下方式实现:所述消杀机器人沿消杀路径进行探测,若所述消杀机器人接收到物体反射波,则发现障碍物;若所述消杀机器人未接收到物体反射波,则未发现障碍物。
一种消杀机器人避障系统,包括:
障碍物状态类型生成模块,用于获取障碍物图像,得到障碍物状态类型;
避障空间状态类型生成模块,用于基于所述障碍物图像,得到避障空间状态类型;
障碍物影响类型生成模块,用于实现所述障碍物图像依次进行分割、分类后,得到障碍物影响类型;
消杀机器人运动控制模块,用于控制所述消杀机器人的运动状态;
报警模块,用于实现所述消杀机器人报警。
一种消杀机器人避障设备,包括处理器和存储器,其中,所述处理器执行所述存储器中保存的计算机程序时实现上述的一种消杀机器人避障方法。
一种计算机可读存储介质,用于存储计算机程序,其中,所述计算机程序被处理器执行时实现实现上述的一种消杀机器人避障方法。
本发明的有益效果在于:
本发明提供了一种消杀机器人避障方法,基于障碍物图像,判断障碍物状态类型、避障空间状态类型和障碍物影响类型,灵活设置消杀机器人的通行操作,使得消杀机器人具有准确、灵活的避障功能;
本发明提供了一种消杀机器人避障方法,通过语义分割障碍物图像,接着经降损处理,最后进行分类处理,得到纹理、轮廓更清晰的分割图像,便于障碍物被准确分类,有利于提升消杀机器人的避障功能。
附图说明
通过阅读下文优选实施方式的详细描述,本申请的方案和优点对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。
在附图中:
图1为实施例中避障方法的流程示意图。
图2为实施例中避障系统的结构示意图。
图3为实施例中避障设备的结构示意图。
具体实施方式
下面将结合附图更详细地描述本公开的示例性实施方式。
本实施例提供了一种消杀机器人避障方法,参见图1,包括如下操作:
S1消杀机器人根据预设的消杀路径行驶,如果探测到所述消杀路径上存在障碍物,则获取障碍物图像;
S2基于所述障碍物图像,得到障碍物状态类型;
若所述障碍物状态类型为动态障碍物,所述消杀机器人报警;
若所述障碍物状态类型为静态障碍物,执行S3;
S3基于所述障碍物图像,得到避障空间状态类型;
若所述避障空间状态类型为存在避障空间,所述消杀机器人通行;
若所述避障空间状态类型为不存在避障空间,执行S4;
S4所述障碍物图像经分割、分类后,得到障碍物影响类型;
若所述障碍物影响类型为第一类障碍物,所述消杀机器人通行;
若所述障碍物影响类型为第二类障碍物,重新规划消杀路径后,所述消杀机器人通行;
若所述障碍物影响类型为第三类障碍物,所述消杀机器人报警。
具体操作方法为:
S1消杀机器人根据预设的消杀路径行驶,如果探测到消杀路径上存在障碍物,则获取障碍物图像。
首先依据建立消杀区域地图,在消杀区域地图内规划消杀路径,将消杀区域地图和消杀路径输入至消杀机器人系统内进行记忆,接着,消杀机器人在工作过程中,若探测到障碍物,获取障碍物的图像,并对障碍物进行状态类型判断。
在建立消杀区域地图时,首先获取消杀区域的RGB图像和深度图,将RGB图像中的地物与深度图中对应的三维点云相关联,完成二维语义信息与三维点云数据的信息融合。具体为,首先对获取的深度图中单帧点云进行下采样的滤波操作,在保留点云结构特征的前提下减少点云数量,降低后续操作所需的算力。随后使用CPF算法对点云进行分割,在进行多平面分割的过程中获取点云间的空间几何关系,实现过程中使用RANSAC算法(Randomsampleconsensus,随机抽样一致算法)对点云进行拟合,筛选出点云中的平面,随后采用Kd树聚类算法(K-dimensiontree)将点云分解为点云团,然后再将点云团反投影到RGB图像上,完成RGB图像中目标物矩形检测框和点云团中目标物矩形框的融合,由此获得带有点云语义信息的地图,生成的地图与消杀机器人和障碍物距离信息相结合,可实现地图用于局部路径规划与导航的功能。对消杀区域完成360°拍摄,重复上述操作,便得到含有丰富信息的地图。
将RGB图像中目标物矩形检测框和点云团中目标物矩形框进行融合时,是通过计算矩形检测框和点云团矩阵之间的交并比,RGB图像和深度图分别乘以交并比后进行融合,实现相似度匹配,得到带有障碍物信息(如障碍物类别、形状和位置)的语义图像。
S1中消杀机器人发现障碍物的操作通过以下方式实现:消杀机器人沿消杀路径进行探测,若消杀机器人接收到物体反射波,则发现障碍物;若消杀机器人未接收到物体反射波,则未发现障碍物。消杀机器人接受物体反射波的功能通过雷达实现,其原理是雷达通过天线把电磁波能量射向空间某一方向,处在此方向上的物体碰到电磁波并将其反射回来,雷达天线接收此反射波,送至接收设备进行处理,提取有关该物体的某些信息(目标物体至雷达的距离,距离变化率或径向速度、方位、高度等)。预设安全距离为1-3m,优选安全距离为2m,合适的安全距离能够给消杀机器人一定的反应时间,并方便消杀机器人获取完整的障碍物图像。
S2基于障碍物图像,得到障碍物状态类型;若障碍物状态类型为动态障碍物,消杀机器人报警;若障碍物状态类型为静态障碍物,执行S3。
S2中得到障碍物状态类型的操作具体为:获取预设采集周期内若干图像,对比若干图像中障碍物位置,若障碍物位置发生变化,则为动态障碍物,若障碍物位置未发生变化,则为静态障碍物。预设采集周期为1-10s,优选预设采集周期为5s,通过对比5s内障碍物图像中障碍物位置,便于快速分辨出障碍物的障碍物状态类型。
上述获取障碍物图像,可通过在消杀机器人上安装视觉传感器实现,视觉传感器优选Kinect相机,上述障碍物图像为障碍物深度影像;上述获取消杀机器人和障碍物的距离,可通过在消杀机器人上安装距离传感器实现,距离传感器优选激光雷达。
S3基于障碍物图像,得到避障空间状态类型;若避障空间状态类型为存在避障空间,消杀机器人通行;若避障空间状态类型为不存在避障空间,执行S4。
S3中得到避障空间状态类型的操作具体为:获取消杀机器人图像,经比例换算后与障碍物图像融合,得到融合图像,融合图像中,若消杀机器人与障碍物不接触,则存在避障空间;若消杀机器人与障碍物接触,则不存在避障空间。
具体为,预先获取消杀机器人图像,根据消杀机器人与障碍物之间的探测距离,将消杀机器人图像大小进行相应的比例换算,可得到与障碍物图像同尺寸比例的消杀机器人图像,接着以障碍物图像为底层,将消杀机器人图像作为顶层图像与障碍物图像结合,得到融合图像,在融合图像中,若消杀机器人与障碍物不接触,则存在避障空间;若消杀机器人与障碍物接触,则不存在避障空间。
S3中若避障空间状态类型为存在避障空间,消杀机器人通行的操作具体为:若避障空间状态类型为存在避障空间,基于障碍物图像,得到障碍物影响类型;若障碍物影响类型为第一类障碍物,消杀机器人速度降至第一速度后通行;若障碍物影响类型为第二类障碍物,消杀机器人速度降至第二速度后通行;若障碍物影响类型为第三类障碍物,消杀机器人速度降至第三速度后通行。第一速度为原速度的60%-100%,优选为原速度的80%;第二速度为原速度的30%-60%,优选为原速度的45%;第三速度为原速度的10%-30%,优选为原速度的20%,存在避障空间后,消杀机器人依据障碍物影响类型选择不同的通行速度,可以提高消杀机器人的灵活性和安全性。
第一类障碍物、第二类障碍物和第三类障碍物分别为弱障碍物、一般障碍物和危险障碍物。弱障碍物可以为纸屑、水渍、纸箱、毛绒玩具等便于移动的障碍物,一般障碍物可以为桌子、椅子等体积大,较重、不便于移动的障碍物,危险障碍物可以为垃圾桶、玻璃瓶、易燃易爆品等具有影响消杀、自带危险性的障碍物。
S3中基于障碍物图像,得到障碍物影响类型的操作同S4中的操作一样,为节省篇幅,将图像分割和分类的内容在S4中进行详述,S3不重复叙述。
S4障碍物图像经分割、分类后,得到障碍物影响类型;若障碍物影响类型为第一类障碍物,消杀机器人通行;若障碍物影响类型为第二类障碍物,重新规划消杀路径后,消杀机器人通行;若障碍物影响类型为第三类障碍物,消杀机器人报警。
S4中得到障碍物影响类型的操作具体为:障碍物图像经特征提取,得到低级空间特征和高级上下文特征,低级空间特征和高级上下文特征经融合后,得到分割图像,分割图像经分类后,得到障碍物影响类型。
具体为,使用BiSeNet网络语义分割障碍物图像。在BiSeNet网络中,障碍物图像在卷积步长较小的空间路径中经特征提取得到低级空间特征,障碍物图像在快速下采样语义路径中经特征提取得到高级上下文特征,接着低级空间特征和高级上下文特征经融合后,得到分割图像,接着使用分类器分类处理分割图像,得到障碍物影响类型。
在得到分割图像的操作之后,还包括降损处理分割图像,得到精细分割图像,对精细分割图像执行分类操作。降损处理通过交叉熵函数实现,提升分割精度,便于得到纹理、轮廓更清晰的精细分割图像。
在正式分类处理分割图像之前,使用含有第一类障碍物、第二类障碍物和第三类障碍物的数据集预训练分类器,然后使用预训练分类器处理分割图像,便于快速、准确得到障碍物影响类型。数据集为NYU-DepthV2数据集,NYU-Depth V2数据集由记录的各种室内场景的视频序列组成,在该数据集中彩色图和深度图已经做了对齐,且给出了密集的像素级别的标注,从而可以保证训练数据样本的多样性。
若障碍物影响类型为第一类障碍物,消杀机器人速度降为第四速度后通行,第四速度为原速度的40%-60%,优选为原速度的50%。
若障碍物影响类型为第二类障碍物,以消杀机器人的位置为新起点,获取消杀机器人四周图像,基于消杀机器人四周图像,利用A*算法得到最优通行路径,消杀机器人依据最优通行路径减速至第五速度通行。A*算法为成熟现有技术,为节省篇幅,因此不在此处过多叙述。第五速度为原速度的10%-30%,优选为原速度的20%。
本实施例还提供一种消杀机器人避障系统,参见图2,包括:
障碍物状态类型生成模块,用于获取障碍物图像,得到障碍物状态类型;
避障空间状态类型生成模块,用于基于障碍物图像,得到避障空间状态类型;
障碍物影响类型生成模块,用于实现障碍物图像依次进行分割、分类后,得到障碍物影响类型;
消杀机器人运动控制模块,用于控制消杀机器人的运动状态;
报警模块,用于实现消杀机器人报警。
本实施例还提供一种消杀机器人避障设备,参见图3,包括处理器和存储器,其中,处理器执行存储器中保存的计算机程序时实现上述的一种消杀机器人避障方法。
本实施例还提供一种计算机可读存储介质,用于存储计算机程序,其中,计算机程序被处理器执行时实现上述的一种消杀机器人避障方法。
本实施例提供了一种消杀机器人避障方法,基于障碍物图像,判断障碍物状态类型、避障空间状态类型和障碍物影响类型,灵活设置消杀机器人的通行操作,使得消杀机器人具有准确、灵活的避障功能。
本实施例提供了一种消杀机器人避障方法,通过语义分割障碍物图像,接着经降损处理,最后进行分类处理,得到纹理、轮廓更清晰的分割图像,便于障碍物被准确分类,有利于提升消杀机器人的避障功能。
- 机器人避障的控制电路、机器人及机器人避障方法
- 一种无人机避障系统及避障方法
- 一种无人艇高速状态下的二级自主避障系统及避障方法
- 一种基于深度学习的机器人避障轨迹规划方法及系统
- 一种机器人避障控制方法、装置、存储介质及机器人
- 一种多机器人协同工作避障方法、系统、设备及存储介质
- 一种管道检测机器人避障方法、系统、介质和电子设备