一种电气设备用检测平台
文献发布时间:2024-04-18 19:44:28
技术领域
本发明属于电气开关检测设备技术领域,具体涉及一种电气设备用检测平台。
背景技术
电力系统中,发电机、变压器、电力线路、断路器等设备统称为电气设备,其中,断路器是保护类电气产品之一,对电力系统的稳定运行及全民日常用电质量起着重要的作用。在对断路器进行抽检时,一般均需要进行过载保护的可靠性检测,给抽检产品以不同过载倍数,检验脱扣器动作性能,评判断路器是否符合标准。
在对断路器进行过载保护可靠性检测时,为了提高接线效率和操作安全系数,行业内专业技术人员均进行了相关的技术探索,但是仍存在不足之处,一般均表现为自动化程度较低。
如授权公开号为CN115343510B的中国发明专利公开了一种电气设备用检测平台,则存在如下不足之处:(1)无法保证接电轴套与待检测件接线柱的同轴关系,定位不准,长期使用接电轴套会由于别劲儿而变形;(2)需要人工操控以实现夹持待检测件,下压过程中挤压弹簧变形产生下行阻力,有的操作人员手部力气小,则只能双手下压,此时便无法操作T形插杆以实现夹持待检测件;(3)需要通过人工推动套框来操作断路器的手柄,自动化程度低。
发明内容
本发明要解决的技术问题是弥补现有技术的不足,提供一种电气设备用检测平台。
要解决上述技术问题,本发明的技术方案为:
一种电气设备用检测平台,包括平台和设置在平台上的外壳、夹持装置和顶推装置;
平台包括水平台面,水平台面上设有定位块,定位块用于断路器后端面的定位;
夹持装置包括相对设置的第一夹持件和第二夹持件,第一夹持件和第二夹持件通过夹持机构与电机J相连,第一夹持件和第二夹持件用于夹持断路器的侧面;
顶推装置包括U形件,U形件的开口端设有顶推辊,顶推辊用于顶推断路器的开关手柄,U形件的封闭端通过伸缩机构与电机D相连;
龙门立柱通过X轴直线移动机构与水平台面滑动连接,移动方向为X向,X轴直线移动机构由X轴电机驱动;悬臂通过Y轴直线移动机构与龙门立柱滑动连接,移动方向为Y向,Y轴直线移动机构由电机Y驱动; X向与水平台面相互平行,Y向为竖直方向,X向与Y向相互垂直;
悬臂上设有多个接电柱套,多个接电柱套分别与断路器的多个接电铜板一一对应;
电机J、电机D、X轴电机和电机Y均与控制器相连。
进一步地,所述平台包括竖板,竖板位于所述水平台面的下方,且与水平台面相互垂直;所述夹持机构包括电动螺杆本体J,电动螺杆本体J设置在所述水平台面的下方,电动螺杆本体J的伸缩杆的伸缩动作由所述电机J驱动,电动螺杆本体J与固定座J固定连接,固定座J与水平台面固定连接;电动螺杆本体J的伸缩杆与推拉连接块固定连接,第一连杆的第一端与推拉连接块铰接,第一连杆的第二端与第一夹持件铰接,第二连杆的第一端与推拉连接块铰接,第二连杆的第二端与第二夹持件铰接,第一夹持件和第二夹持件分设在推拉连接块的两侧,且均通过导轨J和滑块J与竖板滑动连接;第一夹持件和第二夹持件分别穿过一对过孔上伸直水平台面的上方。
进一步地,所述伸缩机构为电动螺杆本体D,电动螺杆本体D与固定座D固定连接,固定座D与水平台面固定连接,电动螺杆本体D的伸缩杆与连接件D固定连接,连接件D与U形件的封闭端焊接固定,连接件D的下方设有滚轮,滚轮用于与水平台面接触滚动。
进一步地,所述顶推辊与U形件的开口端的连接方式为转动连接。
进一步地,所述X轴直线移动机构包括与所述水平台面固定连接的一对X轴导轨,X轴导轨上滑动匹配设有X轴滑块,X轴滑块与龙门立柱的底部固定连接;所述X轴电机固定设置在龙门立柱的底部,X轴电机的输出轴同轴固定有齿轮,齿轮与齿条啮合,齿条与水平台面固定连接。
进一步地,所述Y轴直线移动机构包括与所述龙门立柱固定连接的一对Y轴导轨,Y轴导轨上滑动匹配设有Y轴滑块,Y轴滑块与悬臂固定连接;悬臂与Y轴电动螺杆本体的伸缩杆固定连接,Y轴电动螺杆本体与龙门立柱固定连接。
进一步地,所述第一夹持件和第二夹持件面向断路器的面上粘贴有橡胶垫。
进一步地,所述定位块和夹持装置均置于外壳之外,外壳面向定位块的一面上设有开口,开口处设置有抽拉门。
本发明可以达到的有益效果为:
(1)自动化程度高,断路器的对中定位、固定夹持、接电过程均为自动执行,无需人工参与,相对于人工操作精度高、效率高。
(2)人工放置断路器时,悬臂上的接电柱套位于外壳的内腔中,避免误触电,安全系数高。
(3)设置了外壳,不仅提高了安全系数,而且外形美观。
附图说明
图1是本发明实施例的立体图(一)。
图2是本发明实施例的立体图(二)。
图3是本发明实施例去掉罩壳之后的立体图。
图4是图3的主视图。
图5是图3的俯视图。
图6是图3的仰视图。
图7是图3的左视图。
图8是本发明实施例中夹持装置的主视图。
图9是本发明实施例中夹持装置的仰视图。
图10是本发明实施例中夹持装置的立体图。
图11是本发明实施例中顶推装置的立体图。
图12是本发明实施例的状态图(一)。
图13是本发明实施例的状态图(二)。
图14是本发明实施例的状态图(三)。
图中:1-平台,101-水平台面,102-过孔,103-定位块,104-竖板,
2-抽拉门,3-导向槽,4-外壳,
5-夹持装置,501-固定座J,502-配磨垫,503-电动螺杆本体J,504-导轨J,505-滑块J,506-第一夹持件,507-第一连杆,508-推拉连接块,509-第二连杆,510-第二夹持件,511-电机J,512-橡胶垫,
6-顶推装置,601-固定座D,602-电动螺杆本体D,603-滚轮,604-连接件D,605-U形件,606-顶推辊,607-电机D,
7-接电柱套,8-悬臂,
9-Y轴直线移动机构,901-Y轴电动螺杆本体,902-电机Y,903-Y轴导轨,904-Y轴滑块,
10-龙门立柱,
11-X轴直线移动机构,1101-X轴电机,1102-齿轮,1103-齿条,1104-X轴滑块,1105-X轴导轨,
12-磁铁块,99-断路器,9901-开关手柄。
具体实施方式
下面结合附图和具体实施方式对本发明作进一步详细的说明。
如图1-图7所示,一种电气设备用检测平台,包括平台1和设置在平台1上的外壳4、夹持装置5和顶推装置6,夹持装置5位于外壳4之外。
平台1包括水平台面101,水平台面101上设有定位块103,定位块103用于断路器99后端面的定位,定位块103置于外壳4之外;平台1包括竖板104,竖板104位于水平台面101的下方,且与水平台面101相互垂直。
如图8-图10所示,夹持装置5包括相对设置的第一夹持件506和第二夹持件510,第一夹持件506和第二夹持件510通过夹持机构与电机J511相连,第一夹持件506和第二夹持件510用于夹持断路器99的侧面。夹持机构包括电动螺杆本体J503,电动螺杆本体J503设置在水平台面101的下方,电动螺杆本体J503的伸缩杆的伸缩动作由电机J511驱动,电动螺杆本体J503与固定座J501固定连接,固定座J501与水平台面101固定连接,为了保证安装精度,在固定座J501与水平台面101之间设有配磨垫502,在装配时,通过打磨配磨垫502以保证电动螺杆本体J503的安装精度。电动螺杆本体J503的伸缩杆与推拉连接块508固定连接,第一连杆507的第一端与推拉连接块508铰接,第一连杆507的第二端与第一夹持件506铰接,第二连杆509的第一端与推拉连接块508铰接,第二连杆509的第二端与第二夹持件510铰接,第一夹持件506和第二夹持件510分设在推拉连接块508的两侧,且均通过导轨J504和滑块J505与竖板104滑动连接;第一夹持件506和第二夹持件510分别穿过一对过孔102上伸直水平台面101的上方。第一夹持件506和第二夹持件510面向断路器99的面上粘贴有橡胶垫512。
如图11所示,顶推装置6包括U形件605,U形件605的开口端设有顶推辊606,顶推辊606用于顶推断路器99的开关手柄9901,U形件605的封闭端通过伸缩机构与电机D607相连。伸缩机构为电动螺杆本体D602,电动螺杆本体D602与固定座D601固定连接,固定座D601与水平台面101固定连接,电动螺杆本体D602的伸缩杆与连接件D604固定连接,连接件D604与U形件605的封闭端焊接固定,连接件D604的下方设有滚轮603,滚轮603用于与水平台面101接触滚动。顶推辊606与U形件605的开口端的连接方式为转动连接。
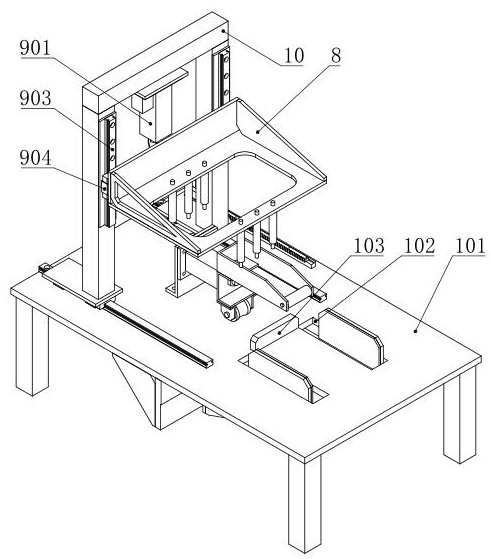
龙门立柱10通过X轴直线移动机构11与水平台面101滑动连接,移动方向为X向,X轴直线移动机构11由X轴电机1101驱动;悬臂8通过Y轴直线移动机构9与龙门立柱10滑动连接,移动方向为Y向,Y轴直线移动机构9由电机Y902驱动; X向与水平台面101相互平行,Y向为竖直方向,X向与Y向相互垂直。
X轴直线移动机构11包括与水平台面101固定连接的一对X轴导轨1105,X轴导轨1105上滑动匹配设有X轴滑块1104,X轴滑块1104与龙门立柱10的底部固定连接;X轴电机1101固定设置在龙门立柱10的底部,X轴电机1101的输出轴同轴固定有齿轮1102,齿轮1102与齿条1103啮合,齿条1103与水平台面101固定连接。
Y轴直线移动机构9包括与龙门立柱10固定连接的一对Y轴导轨903,Y轴导轨903上滑动匹配设有Y轴滑块904,Y轴滑块904与悬臂8固定连接;悬臂8与Y轴电动螺杆本体901的伸缩杆固定连接,Y轴电动螺杆本体901与龙门立柱10固定连接。
悬臂8上设有6个接电柱套7,6个接电柱套7分别与断路器99的6个接电铜板一一对应;3个接电柱套7通过电线与三相电源相连,另3个接电柱套7与电流调节设备相连。
电机J511、电机D607、X轴电机1101和电机Y902均与控制器相连。
外壳4面向定位块103的一面上设有开口,开口用于使悬臂8带动接电柱套7进出,开口处通过导向槽3设置有抽拉门2,抽拉门2上设有开口K,当抽拉门2向下移动的过程中,该开口K与顶推装置6的U形件605不干涉;当抽拉门2上推至上位时,通过将磁铁块12放置于抽拉门2的底部并与外壳4相吸,如此抽拉门2便不会下落。
本实施例的使用:如图12-14所示。
(1)手动将断路器99放置于水平台面101上,且后端与定位块103相抵,同时,断路器99的开关手柄9901与顶推装置6的顶推辊606非常接近;向上拉并固定抽拉门2于上位。
(2)通过控制器启动通电程序:
S1:电机J511动作,夹持装置5的第一夹持件506和第二夹持件510对中夹持断路器99的侧面,而后电机J511停止动作;夹持力度可以通过设置压力感应片来感知,压力感应片与控制器相连;
S2:电机Y902动作,使悬臂8处于上位,而后电机Y902停止动作;
S3: X轴电机1101动作,使龙门立柱10处于前位,6个接电柱套7分别与断路器99的6个接电铜板的位置一一对应;而后停止动作;
S4:电机Y902动作,使悬臂8处于下位, 6个接电柱套7分别与断路器99的6个接电铜板抵靠接触导电;
S5:电机D607动作,顶推装置6的顶推辊606顶推断路器99的开关手柄9901,开关手柄9901的状态为ON时,电机D607反向动作恢复原状。至此通电程序执行结束。
上述各动作到位均是通过接近开关感应并反馈给控制器来控制的,由于此属于本领域技术人员的常识,故此处不赘述。
(3)进行常规过载保护可靠性检测。
(4)检测完毕后,通过控制器启动复位程序,复位程序与通电程序相反。
本实施例的优点:
(1)自动化程度高,断路器99的对中定位、固定夹持、接电过程均为自动执行,无需人工参与,相对于人工操作精度高、效率高。
(2)人工放置断路器99时,悬臂8上的接电柱套7位于外壳4的内腔中,避免误触电,安全系数高。
(3)设置了外壳,外形美观。
- 一种检测电气设备内四氟化碳含量的方法以及装置
- 一种教学用工程机械电气设备检测实验台
- 一种电气设备用检测平台
- 一种电气设备调试检测平台