电力转换装置
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及一种电力转换装置,尤其涉及一种无位置传感器控制的电力转换装置。
背景技术
已知一种关于PM(Permanent Magnet,永磁体)电动机的控制技术,其中将永磁体配置在转子上。对于PM电动机,存在将高次谐波叠加方式用于从停止到基本速度的大约10%的低速范围内的无位置传感器控制。
涉及高次谐波叠加方式的专利文献1公开了这样一种方法,其中,在运行期间将高次谐波信号叠加到电压指令上,根据通常的dc轴和qc轴的电流控制的输出值来推算电感。该方法公开了一种在利用编码器的矢量控制中实现高精度且高响应性的转矩控制的方法。此外,专利文献1描述了其能够应用于在中高速范围内的扩展感应电压方式的无位置传感器控制。
现有技术文献
专利文献
专利文献1:日本特开2008-92657号公报
发明内容
发明要解决的课题
专利文献1描述了能够应用于中、高速范围内的扩展感应电压方式的无位置传感器控制,但是没有考虑从停止到基本速度的大约10%的低速范围内在运行期间推算电感。
本发明的目的是提供一种无位置传感器控制的电力转换装置,其在包括低速区间的速度区间中精确地推算运行期间的电感。
用于解决课题的技术方案
本发明的优选一例是一种电力转换装置,其包括:高次谐波电压发生部,其按照切换信号将dc轴和qc轴的高次谐波电压叠加于所述dc轴和所述qc轴的电压指令;和电感推算部,其基于所述dc轴和所述qc轴的高次谐波电流的振幅值、所述高次谐波电压的振幅值和所述切换信号,来推算所述dc轴和所述qc轴的电感。
发明效果
根据本发明,能够实现一种无位置传感器控制的电力转换装置,该装置在包括低速区间的速度区域中精确地推算运行期间的电感。
附图说明
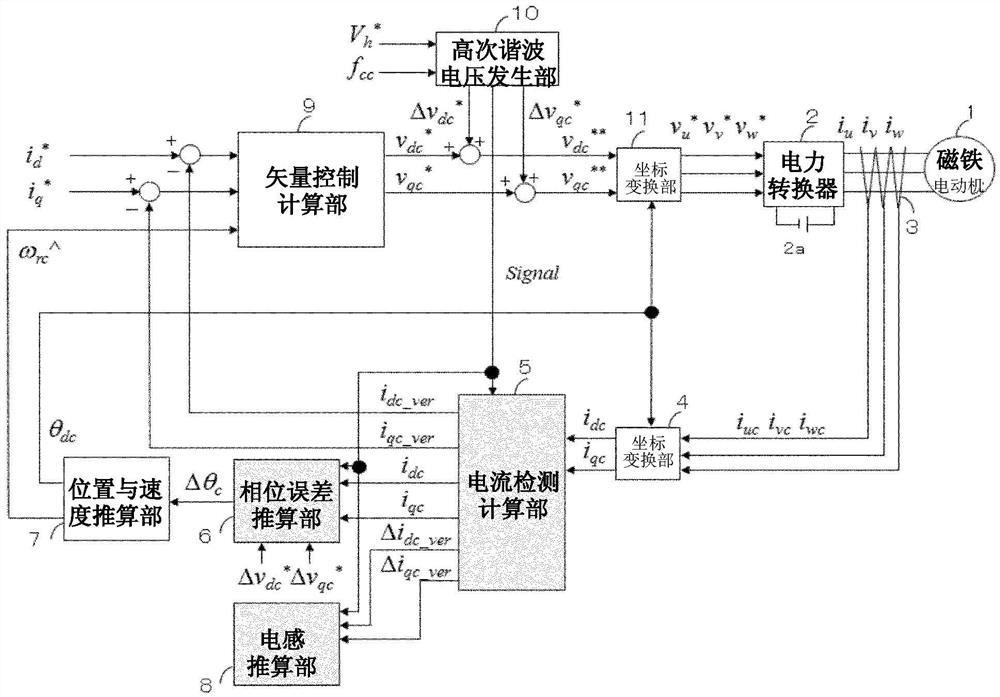
图1是包括实施例1的电力转换装置和电磁电动机的系统结构图。
图2是表示实施例1的高次谐波电压发生部的结构的图。
图3是表示实施例1的电流检测计算部的结构的图。
图4是表示实施例1的相位误差推算部的结构的图。
图5是表示实施例1的电感推算部的结构图。
图6是关于相位误差和电感的时间图。
图7是说明在使用实施例1的情况下的检验方法的图。
图8是表示使用实施例1时的电流波形的图。
图9是包括实施例2的电力转换装置和电磁电动机的系统结构图。
图10是表示实施例2的高次谐波电压发生部的结构的图。
图11是表示实施例2的电感推算部的结构的图。
图12是包括实施例3的电力转换装置和电磁电动机的系统结构图。
具体实施方式
在下文中,将参考附图详细描述该实施例。
实施例1
图1是包括实施例1的电力转换装置和电磁电动机的系统的结构图。电磁电动机1输出电动机转矩,该电动机转矩是将由永磁体的磁通引起的转矩分量和由电枢绕组的电感引起的转矩分量合成而得到的。
电力转换器2包括作为开关元件的半导体元件。电力转换器2输入三相交流电压指令值v
电流检测器3检测电磁电动机1的三相交流电流i
接下来,将描述控制电力转换器的控制部的各构成要件。坐标变换部4以位置推算值θ
电流检测计算部5输出所述dc轴和qc轴的电流检测值i
相位误差推算部6根据dc轴和qc轴的电流检测值i
位置与速度推算部7根据所述相位误差的推算值Δθ
电感推算部8根据dc轴和qc轴的高次谐波电压的振幅值Δv
矢量控制计算部9根据dc轴的电流指令id*与平均值i
高次谐波电压发生部10设定高次谐波电压的振幅值v
坐标变换部11以位置推算值θ
首先,将描述该实施例中的基于矢量控制的电压控制和相位控制的基本动作。电压控制的矢量控制计算部9基于d轴的电流指令i
此外,矢量控制计算部9使用作为dc轴和qc轴的电流控制的输出的d轴电流控制的PI控制输出Δv
式(1):
在此,每个参数如下。
R:电磁电动机的总电阻
L
K
Δv
Δv
高次谐波电压发生部10输出高次谐波电压的振幅值为
式(2):
另一方面,关于用于相位控制的相位误差推算部6,作为参考文献例如有电气学会论文志D(工业应用部门志)、123卷(2003)2号140-148的“IPM电动机的停止时和初始位置推算方式”(電気学会論文誌D(産業応用部門誌)、123巻(2003)2号140-148の「IPMモータの停止時·初期位置推算方式」)。使用该方式时,在高次谐波电压发生部10中,将矩形波或正弦波的高次谐波电压Δv
式(3)
在此,式(3)中的各符号的定义如下。
L
Vv
此外,在位置与速度推算部7中,以将相位误差的推算值Δθ
式(4)
在此,各个参数如下。
K
然而,式(3)是一个非常复杂的式子,有记载受电动机常数波动的影响很大。于是,在该文献中,通过将高次谐波电压仅叠加在一个轴上,通过简单的式(5)所示的计算来计算相位误差Δθ
例如,设Δv
式(5)
根据式(5),在叠加了高次谐波电压的轴向上,能够根据高次谐波电压和电流之间的关系来推算电感,但是不能推算没有叠加的轴向上的电感。
因此,通过使用作为本实施例的特征的高次谐波电压发生部10、电流检测计算部5、相位误差推算部6和电感推算部8,来改善该问题。
下面将说明使用它们时的控制特性。
图2示出了实施例1的高次谐波电压发生部10的结构。说明该结构。
附图标记10a是与高次谐波电压有关的矩形波信号。大小为±1,高次谐波的频率约为几百Hz至几千Hz,并且这些值能够从外部设置为10h的f
附图标记10b是确定高次谐波电压叠加方向的切换信号Signal。大小为±1,频率约为从10a输出的矩形波信号的几分之一至几十分之一。
附图标记10c是dc轴方向上的高次谐波电压发生部。当Signal=1时,10c的输出信号为10a。此后,在乘法部10d中,与作为高次谐波电压的振幅值v
附图标记10e是qc轴方向的高次谐波电压发生部。当Signal=-1时,10e的输出信号为10a。之后,在乘法部10f中,与作为高次谐波电压的振幅值v
图3示出了实施例1的电流检测计算部5的结构。说明该结构。附图标记5a、5b是L.P.F(Low Pass Filter,低通滤波器),输出去除了电流检测值i
在此,L.P.F5a和L.P.F5b可以是移动平均滤波器等。此外,根据式(6)使用电流检测值i
式(6)
附图标记5c是FFT(Fast Fourier Transform,快速傅立叶变换)计算部,输出作为高次谐波电流Δi
图4示出了实施例1的相位误差推算部6的结构。说明该结构。附图标记6a、6d是微分计算部,附图标记6b、6e是除法计算部,而附图标记6c、6f是根据d轴和q轴的电感值计算出的比例系数。使用电流检测值i
式(7)
式(8)
设d-q轴以电动机的磁极轴为基准,在实施例中的计算部和推算部中使用的推算坐标轴是dc-qc轴。由相位误差推算部推算的相位误差推算值Δθc是d轴和dc轴之间的相位误差的推算值Δθ
切换部6g将Signal=1时的计算值Δθ
图5示出实施例1的电感推算部8的结构。说明该结构。电感推算部8输入切换信号Signal和高次谐波电流的振幅值Δi
式(9)
式(10)
通过计算而得出的d轴和q轴的电感推算值L
图6示出了与实施例1的相位误差和电感有关的时序图。第一段是切换信号Signal的波形,第二段是叠加于dc轴的高次谐波电压Δv
能够在Signal=1时根据式(9)计算d轴电感的推算值L
如上所述,根据实施例1,即使在高次谐波叠加型的无位置传感器控制的运行期间,也能够推算相位误差推算值Δθ
也可以使用相位误差推算值Δθ
在实施例1中,Signal=1和Signal=-1的期间在图6中看起来相同,但是任一期间较长都可以。换句话说,为了分别推算dc轴和qc轴的电感和相位误差而切换高次谐波的切换信号Signal的1和-1的期间在dc轴和qc轴之间可以不同。
此外,在图6中的点A,高次谐波电压进行了切换,但是如果对相位误差和电感的计算时刻没有影响,则即使存在高次谐波电压Δv
此外,在该实施例中是在运行期间推算电感,但是也能够由表创建部使用在运行期间测量出的结果来创建关于电流值和电感的表,而从下一运行时刻起使用所创建的表来计算电感。这样,能够减少用于计算电感的计算成本。
此外,尽管高次谐波电压在图6中示出了矩形波的示例,但是它也能够是正弦波。
在此,将参考图7描述当采用本实施例时的检验方法。将电流检测器3安装于驱动电磁电动机1的电力转换装置16,并且将编码器21安装于电磁电动机1的轴。
向高次谐波电流的计算部23输入作为电流检测器3的输出的三相交流的电流检测值(i
根据实施例1,在高次谐波叠加型无位置传感器控制中,能够推算作为控制轴与磁通轴之间的相位差的相位误差以及电磁电动机的d轴和q轴电感。
此外,根据实施例1,能够在包括低速区间的速度区间中实现精确推算运行期间的电感的、无位置传感器控制的电力转换装置。在此,低速范围是电动机从停止起到大约为基本速度的10%的速度范围。
因为能够精确地推算运行期间的d轴和q轴的电感,从而获得正确的凸极比,所以即使在高转矩下,也能够基于凸极比执行无位置传感器控制,从而能够实现稳定的无位置传感器控制。在此,无位置传感器是指不需要将编码器安装于电动机的控制。
实施例2
图9是包括实施例2的电力转换装置和磁铁电动机的系统的结构图。在实施例1中,以规定方式给出了高次谐波电压的振幅值,但是在该实施例中,增加了高次谐波的电流控制,并且从其振幅值和高次谐波电流的振幅值计算电感推算值L
图10示出了实施例2的高次谐波电压发生部10’。在图10中,10’a至10’f、10’h与图2的矩形波信号10a至乘法部10f、高次谐波的频率f
在dc轴上,PI控制部10’j以dc轴的高次谐波电流的振幅值Δi
在qc轴上,PI控制部10’l以qc轴的高次谐波电流的振幅值Δi
图11示出了实施例2的电感推算部8’的结构。说明该结构。在该图中,图8中的8’b、8’d、8’f、8’g和Z
式(11)
式(12)
通过计算而得出的d轴和q轴的电感推算值L
利用这样的结构,能够将高次谐波电流的振幅值控制为一定,不产生多余的电流而提供高效的电力转换装置。
实施例3
图12是包括实施例3的电力转换器和电磁电动机的系统结构图。该实施例是在电磁电动机驱动系统上的应用。
作为图1的构成要件的电磁电动机1由电力转换装置16驱动。软件16a和硬件安装于电力转换装置16。图1中的坐标变换部4、电流检测计算部5、相位误差推算部6、位置与速度推算部7、电感推算部8、矢量控制计算部9、高次谐波电压发生部10和坐标变换部11被作为软件16a安装。图1的电力转换器2、直流电压源2a和电流检测器3被作为硬件安装。
软件16a的处理由个人计算机、处理器等执行。准备能够向用户显示功能和存储和/或进行指示的外部装置,例如电力转换装置16的数字操作器16b、个人计算机17、平板电脑18或智能手机19等,或者外部的上级装置。然后,能够通过个人计算机17、平板电脑18、智能手机19等来设定软件16a中的高次谐波电压的振幅值和高次谐波电压的频率。
如果采用实施例2的构成,则能够使用高次谐波电流的振幅值代替高次谐波电压的振幅值。
如果将该实施例应用于电磁电动机驱动系统,则能够推算相位误差和电感。
此外,高次谐波电压的振幅值和高次谐波电压的频率能够在作为上级装置的可编程逻辑控制器(PLC)或与计算机连接的局域网(LAN)上进行设定。
至此,在实施例1至实施例3中,使用电流指令值i
并且,根据电流指令值i
式(13)
在此,式(13)中的各个符号的定义如下。
Δv
式(14)
在此,式(14)中的各个符号的定义如下。
v
式(15)
此外,也能够根据电流指令i
此外,还能够应用于矢量控制方式,该矢量控制方式计算使用了dc轴的电流指令i
式(16)
在此,式(16)中的各个符号的定义如下。
Kpd:d轴电流控制的比例增益,Kid:d轴电流控制的积分增益,Kpq:q轴电流控制的比例增益,Kiq:q轴电流控制的比例增益,s:拉普拉斯算子。
式(17)
式(18)
在此,式(18)中的各个符号的定义如下。
R1:电磁电动机的一次电阻,Td:q轴的电流指令i
在实施例1至实施例3中,构成电力转换器2的开关元件可以是Si(硅)半导体元件,也能够是SiC(碳化硅)或GaN(氮化镓)等的宽带隙半导体元件。
附图标记说明
2…电力转换器,3…电流检测器,4…坐标变换部,5…电流检测计算部,6…相位误差推算部,7…位置与速度推算部,8,8’…电感推算部,9…矢量控制计算部,10、10’…高次谐波电压发生部,16…电力转换装置,L