控制装置
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及一种根据权利要求1的前序部分的控制装置,该控制装置可以用在机电式凸轮轴调节器中并且包括谐波驱动装置。
背景技术
该类型的控制装置已由例如DE 10 2016 222 773 B3公开。该已知的控制装置包括C型补偿元件,该补偿元件能够补偿伺服电机的电机轴与谐波驱动装置的部件之间的轴向偏移。该补偿元件可以设计成由线材成的单件式或多件式弹簧元件。
DE 10 2016 220 631 A1公开了一种适用于电动凸轮轴调节器的控制装置,其中,在电动机和控制传动装置之间连接有弹簧元件。在这种情况下,弹簧元件构造为螺线弹簧。
从DE 10 2016 210 864 A1中已知一种控制驱动装置,其特别适合于用于调节往复活塞式发动机的压缩比的装置。该控制传动装置包括电动机和可由后者致动的控制传动装置,其中在挠性齿轮部件与控制传动装置的从动元件之间连接有呈爪形联轴器形式的刚性联轴器。
发明内容
本发明的目的是提出一种与谐波驱动装置一起工作的控制装置,该控制装置相比于现有技术得到进一步发展,特别适合用于机电式凸轮轴调节器,其特征在于特别紧凑的、便于生产的结构并且同时具有很高的运行可靠性。
根据本发明,这一目的通过具有权利要求1的特征的控制装置来实现。在已知的基本结构中,该控制装置包括电动机和经由离合器联接到该电动机的控制传动装置,该控制装置设计为谐波驱动装置,其中设置有双臂式线材联轴器为联接元件,该联接元件的臂啮合在控制传动装置的波形发生器的内环的开口中。
根据本发明,线材联轴器具有绕组,该绕组以非旋转方式缠绕在电动机的电机轴上。不需要附加部件即可将双臂式线材联轴器连接到电动机的电机轴上,就像根据DE 102016 222 773 B3的装置那样以中间件的形式连接。已经表明,按照根据权利要求1所述的设置方式,将双臂式线材联轴器直接紧固在电机轴上,即使电动机和控制传动装置之间传递的转矩在数量和方向上频繁地变化,电动机的电机轴和线材联轴器之间的连接也不会松动。
在优选实施例中,该实施例涉及线材联轴器的绕组和电动机的电机轴之间在周向方向上的刚性连接,该电机轴在其与线材联轴器接触的区域中具有矩形的、特别是正方形的截面。也可以考虑其他偏离圆形的截面设计,此类截面设计例如以二面体或多边形的形式,特别是以三角形、六边形或八边形的形式实现形状配合。
在所有情况下,双臂式线材联轴器都极易安装在电动机的电机轴上。双臂式线材联轴器的弹簧和阻尼特性以及其低惯性矩也是有利的。更进一步地,要相互联接的元件,即一方面是电动机的电机轴,另一方面是波形发生器的内环,不必满足关于几何进动的极高要求。
无需使用单独的补偿元件,例如以欧式(Oldham)圆盘的形式,双臂式线材联轴器就可以补偿伺服电机(即电动机)与设计为谐波驱动装置的伺服电机之间的轴向偏移。此处,与控制传动装置和电动机的尺寸相比,由弹簧线材制成的线材联轴器在轴向方向上仅占据少量空间。经由双臂式线材联轴器建立的连接可以设计为带或不带间隙的联接件。
根据一个可能的实施例,双臂式线材联轴器具有其两个臂的端部,所述端部分别设计为具有两个层。这意味着线材在臂的端部弯曲了180°。以这种方式,可以产生与所要驱动的波形发生器的内环的扩大的接触区域。
根据第一变体,由线材形成的臂的端部以金属丝彼此层叠的方式弯曲。每个臂的末端都描述了一个非常窄的U形,其中两个U形支脚相互接触。根据一种替代的变体,两个U形支脚之间形成一段距离,所述两个U形支脚位于每个臂的端部。该距离可以例如对应于线材的直径,或者大于线材的直径,例如,是线材直径的两倍。在该变体中,由两臂式联轴器的线材形成的两个U形支脚可以弹性地彼此相对移动。这使得可以将线材联轴器的臂的每个U形弯曲端插入到波形发生器的内环的开口中,该开口的尺寸构造成使得臂的端部只能在机械预应力下插入到开口中。因此,可以用尽可能简单的方式在双臂式线材联轴器和波形发生器的内环之间建立无间隙的连接。
线材联轴器的每个臂具有例如基本上在电机轴的径向方向上延伸的内臂部分和平行于电机轴定向的外臂部分。两个外臂部分优选地具有相同的长度。
根据另一种改进的设计,联轴器的两个臂中的每个臂都具有一个绕组部分,该绕组部分不抵靠任何机械元件并且围绕假想椎体放置。为了简便起见,绕组部分也称为螺旋部分。实际上,当沿着线材联轴器的中心轴线观察时,每个螺旋部分仅显示为螺旋状。然而,与螺旋弹簧形成对比的是,螺旋部分的螺旋圈不在单个平面中。相反地,与螺线弹簧相比,联轴器的每个臂的所谓的螺旋部分也沿电动机的电机轴的轴向方向(即纵向方向)延伸。线材联轴器的臂的两个螺旋部分优选地在线材联轴器的轴向方向上前后相继布置布置。在该实施例中,外臂(即臂的轴向对齐部分)具有不同的长度。总体上,由此线材联轴器便具有极其节省空间的结构,同时在周向方向上具有显着的回弹性。根据一个可能的实施例,螺旋部分所描述的两个锥体借由平行移位而彼此相继出现,每个锥体的尖端在控制装置的中心轴线(即,电动机和控制传动装置共同的中心轴线)上位于电动机的电机轴内。
控制装置尤其可以用在机电式凸轮轴调节器中。控制传动装置也适合在用于改变往复活塞式发动机的压缩比的装置中使用。控制装置也可用于工业系统中,例如用于机器人或机床中。
附图说明
下文借助附图更详细地描述了本发明的若干示例性实施例。在附图中:
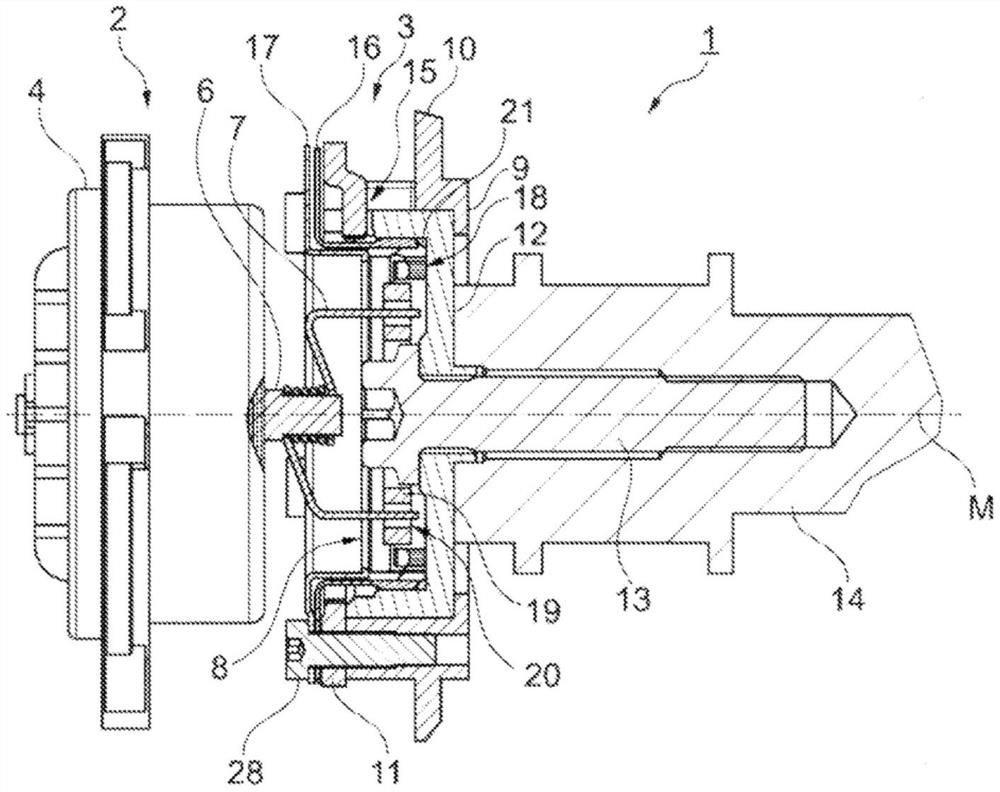
图1在局部剖视图中示出了控制装置的第一示例性实施例;
图2示出了根据图1的装置结构的部件,即具有连接到其上的联接元件的电动机;
图3在透视图中示出了具有连接到其上的改良联接元件的电动机;
图4在类似于图1的视图中示出了控制装置的又一实施例;
图5和图6示出了控制装置的又一实施例。
除非另有说明,否则以下说明涉及所有示例性实施例。在所有附图中,彼此对应或基本上具有相同效果的部件均标有相同的附图标记。
具体实施方式
整体被标记为附图标记1的控制装置旨在用于内燃机中的机电式凸轮轴调节器。关于控制装置1的基本功能,请参考开头所引用的现有技术。
控制装置1包括作为伺服电机的电动机2和由后者致动的控制传动装置3,该控制装置1设计为谐波驱动装置。用于电动机2的电气连接(包括信号传输)的连接部分5指配给电动机2的电机壳体,该电机壳体由4标示。电动机2设计为内转子并且具有电机轴6,该电机轴6经由以双臂式线材联轴器形式呈现的联接元件7与控制传动装置3相互作用,该联接元件也简称为联轴器。
控制传动装置3包括波形发生器8,该波形发生器8与其他部件一起布置在由9标示的谐波驱动装置3的非封闭的传动装置壳体中。在示例性实施例中,传动装置壳体9一体式地连接至链轮10。链轮10由链条(未示出)驱动并且按本身已知的方式以内燃机的曲轴转速的一半进行旋转。
控制传动装置3是三轴齿轮机构,其中传动装置壳体9包括代表三个轴之一的链轮10。另一轴以设计成环形齿轮的从动元件12的形式呈现,该输出元件可旋转地安装在传动装置壳体9中。此处,沿径向方向的滑动轴承设置成直接穿过传动装置壳体9。在第一方向上的从动元件12的轴向滑动轴承也设置成直接穿过传动装置壳体9。在相反的轴向方向上,从动元件12由止动垫圈11支撑,该止动垫圈牢固地连接到传动装置壳体9。此外,止动垫圈11和从动元件12形成止挡轮廓15,该止挡轮廓限制了从动元件12和传动装置壳体9之间的旋转角度。
从动元件12借助中央螺钉13连接到由14标示的凸轮轴。凸轮轴14和控制装置1共同的中心轴线用M表示。凸轮轴14可以是内燃机的进气或排气凸轮轴。
呈环状套筒16形式的弹性的外齿传动元件紧固在传动装置壳体9上。前盖17放置在环状套筒16的前面。前盖17与环状套筒16一起借助螺钉28固定到传动装置壳体9,螺钉28也穿透止动垫圈11。就像环状套筒16一样,前盖17具有帽形,即具有套筒形的圆柱部分和邻接的径向地向外取向的凸缘的环状。
为波形发生器8分配了滚柱轴承18,该滚柱轴承在示例性实施例中被设计为滚珠轴承。滚柱轴承18的内环19具有开口20,联接元件7的臂22、23啮合到开口20中。两个臂22、23在开口20中的啮合方式被设计成使得可以补偿控制传动装置3和电动机2之间的轴向偏移和径向偏移。
与内环19形成对比的是,用21表示的滚柱轴承18的外环设计成柔性的并且直接布置在环状套筒16的外齿部分内。环状套筒16的外齿接部以本身已知的方式部分地啮合从动元件12的内齿接部,其中上述齿接部的齿数与弹性传动元件16的外齿接部的新齿数略有不同。因此,谐波驱动装置3用作显著简化的控制传动装置,其中内环19代表其第三轴。
在根据图1和图2的实施例中,联接元件7的每个臂22、23都具有内臂部分24和在轴向方向上(即平行于中心轴线M)延伸的邻接的外臂部分25。在这种情况下,两个外臂部分25的长度相等。内臂部分24经由绕组26彼此连接,绕组26直接缠绕在电机轴6上。电机轴6在该区域中设计成矩形断面RP,使得联接元件7和电机轴6之间在周向方向上存在形状配合。
关于绕组26的设计、内臂部分24的几何结构以及外臂部分25的长度和对齐,根据图3的示例性实施例的联接元件7对应于根据图1和图2的设计。这同样适用于电机轴6的矩形断面RP的正方形形状。根据图3的联接元件7可以用在根据图1的控制装置1中,而无需更换或修改其他部件。由图3可见,每个外臂部分25在其端部具有弯曲部分27。借助于这些弯曲部分27,臂22、23与内环19之间的接触区域扩大。同时,与根据图1的设计相比,联接元件7和波形发生器8之间的自由径向可移动性受到限制。
根据图4的实施例不同于根据图1至图3的设计,区别在于外臂部分25不是经由平直部分连接到绕组26,而是经由所谓的螺旋部分29、30进行连接。在这种情况下,整个联接元件7也由弹簧线材制造为一体式部件。每个螺旋部分29、30描述围绕假想椎体放置的空间上弯曲之曲线的形状,该假想椎体的尖端在中心轴线M上位于电机轴6内。因此,每个螺旋部分29、30代表螺旋弹簧和螺线弹簧之间的中间部分。与根据图1至图3的设计相比,由于螺旋部分29、30,根据图4的示例性实施例的联接元件7被设计为在周向方向上更软。这意味着作用在内环19和电机轴6之间的一定转矩导致电机轴6和内环19之间的旋转更强。在启动电动机2时必须考虑该旋转并且该旋转对作用在控制装置1内的力和转矩具有阻尼作用。
在安装电动机2时,必须将其密封以防止机油泄漏。这就需要将密封件旋入并压入密封空间,从而增加装配力。同时,应该旋入线材联轴器7。在旋入时,无论是从光学上还是由于装配力增加,都很难看出线材联轴器7实际上是否已旋入。这不仅对周期时间不利,而且在装配期间也可能损坏线材联轴器7。图5和图6示出了图3的线材联轴器7的变体,其避免了这个问题。为此,臂部分25、26在导槽31中被导引。臂22、23仅在初始启动期间旋入为其提供的开口20中。开口20可以形成导槽31的局部部分。本发明因此还包括一种装配方法,其中臂22、23最初仅啮合在例如环状或局部环状的导槽31中,而且尚未或仅偶然地最终啮合在开口20中。仅在后续步骤中,例如当电动机2启动时,臂22、23才旋入开口20中。
在一个实施例中,控制装置在内环的圆周上可以具有比臂22、23更多的开口20,以便不仅能够精确地锁定在一个位置,而且还能以更少的旋转进行锁定。
由图5明确可知,线材联轴器7可以具有端侧,在当前情况下为径向取向的弯曲部32,在装配期间,该弯曲部32在内环19上提供轴向止挡。线材联轴器7受到保护以防过载,并且触觉反馈得到传达。
附图标记说明
1 控制装置
2 电动机、伺服电机
3 控制传动装置
4 电机壳体
5 连接部分
6 电机轴
7 联接元件、线材联轴器
8 波形发生器
9 传动装置壳体
10 链轮
11 止动垫圈
12 从动元件
13 中央螺钉
14 凸轮轴
15 止挡轮廓
16 环状套筒
17 前盖
18 滚动轴承
19 内环
20 开口
21 外环
22 臂
23 臂
24 内臂部分
25 外臂部分
26 绕组
27 弯曲部分
28 螺钉
29 螺旋部分
30 螺旋部分
31 导向斜板
32 弯曲部
M 中心轴线
RP 矩形断面