一种雨污水管道的整体紫外光固化修复工艺
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及管道修复技术领域,具体是涉及一种雨污水管道的整体紫外光固化修复工艺。
背景技术
现阶段的管道修复一般均采用非开挖式的修复技术,而非开挖式的修复技术由于对排污管道的破坏较小、施工修复效率高、耗费物资较少而被广泛推广。其中,紫外光固化修复技术是近几年才得到应用的。
中国专利CN201811069307.1公开了一种排污管道的整体紫外光固化修复工艺,解决了现阶段对排污管道内多处破损修复不便的问题。其技术方案要点是一种排污管道的整体紫外光固化修复工艺,通过将整根的紫外线修复管放入排污管道内,使用密封充气组件将紫外线修复管的两堵密封并充气,使得紫外线修复管膨胀后和排污管道的内壁相贴合,并将紫外灯管道小车从紫外线修复管内的一端行驶到紫外线管道的另一端,从而使得紫外线修复管的UV固化胶管层固化,从而对排污管道内壁进行支撑且完成对排污管道上多处的破损点修复。
污水管在修复前内部有大量淤泥和其他杂质,直接进行光固化修复会使得UV固化胶管内铺不够贴附污水管壁,从而也就无法进行有效修复:且需要在光固化之前对UV固化胶管充入大量气体,比较费时,且不便放置紫外灯管道小车。
发明内容
为解决上述技术问题,提供一种雨污水管道的整体紫外光固化修复工艺,本技术方案解决了污水管修复前内部淤泥堆积、光固化胶管充气时间长和不便放置紫外灯管道小车的问题
为达到以上目的,本发明采用的技术方案为:
一种雨污水管道的整体紫外光固化修复工艺,包括有以下步骤:步骤一,上游封堵,堵塞待修复污水管相邻的上游污水管道,使得待修复污水管内部无污水流动,从而便于操作;步骤二,管道清淤和检测,将清淤机器人放置在污水管道内部上游,由其自行对污水管道进行清淤和监测,清淤完成后将所述清淤机器人取出;步骤三,铺设垫层,利用牵引绳将底膜拉入污水管道进行铺设垫层,便于将光固化管道在底膜上滑动从而铺设在污水管道内,防止光固化管道外层刮花;步骤四,铺设光固化管道,利用牵引绳将内部设置有环状辅助透明气管的光固化管道在底膜上滑动从而铺设在污水管内;步骤五,对环状辅助透明气管内进行充气,将充气扎头与环状辅助透明气管输入端密封固定,通过气管将固化车输气端与充气扎头连通,固化车向环状辅助透明气管中充气;步骤六,光固化,待环状辅助透明完全膨胀将光固化管道撑起,将紫外线管道小车穿过充气扎头,启动紫外线管道小车使其在充气状态的环状辅助透明气管中行走,待光固化管道完全固化后将小车从管内取出;步骤七,拆卸收工,将充气扎头从环状辅助透明气管两端拆下,将环状辅助透明气管从已固化的光固化管道中抽出,切割光固化管道两端多余部分,取出上游封堵,完成修复。
优选地,清淤机器人包括有:圆柱形机体,外圆周面上设置有用于实时监测污水管内情况的摄像头;三工自适应抵接行走脚,同轴向设置在圆柱形机体两端;水管,同轴贯穿圆柱形机体;径向冲洗头,输入端通过旋转接头与水管一端转动连接;双工反向驱动器,第一工作端与径向冲洗头同轴固定连接,所述双工反向驱动器驱动部沿圆柱形机体轴向设置在圆柱形机体内部,工作状态下,所述双工反向驱动器第一工作端和第二工作端同轴反向转动;刷臂,与圆柱形机体同径向且沿圆柱形机体轴线均布在双工反向驱动器第二工作端外圆周面上。
优选地,三工自适应抵接行走脚包括有:三个转动座,沿圆柱形机体轴线设置在圆柱形机体外圆周面两端;转动臂,所述转动臂上沿圆柱形机体径向设置有与转动座转动连接的转动柱;轮毂电机,轴线与圆柱形机体轴线垂直转动设置在转动臂另一端;扭簧,同轴套设在转动柱上,且两端分别与转动座和转动臂固定连接。
优选地,径向冲洗头包括有:连通管,通过旋转接头与水管一端同轴转动连接,所述旋转接头旋转部通过双工反向驱动器与刷臂反向同轴转动连接;饼状盒,与连通管同轴固定连接且内部与水管连通;第一喷嘴,工作端朝外且沿连通管轴线均布在饼状盒外圆周面上,所述第一喷嘴与饼状盒内部连通。
优选地,径向冲洗头还包括有第二喷嘴,所述第二喷嘴沿连通管轴线均布在饼状盒朝向双工反向驱动器端面上,所述第二喷嘴与饼状盒内部连通。
优选地,双工反向驱动器包括有:第一齿轮,同轴固定设置在与径向冲洗头转动连接的旋转接头上;伺服电机,同轴向设置在圆柱形机体内部且其输出轴贯穿圆柱形机体一端通过第二齿轮与第一齿轮啮合传动连接;固定轨道圈,同轴固定设置在圆柱形机体一端;内齿圈,一端同轴设置有与固定轨道圈同轴转动连接的转动轨道圈,所述内齿圈内齿与第二齿轮啮合传动连接,刷臂沿第一齿轮轴线均布在内齿圈外圆周面上。
优选地,刷臂包括有:固定臂,沿沿第一齿轮轴线均布在内齿圈外圆周面上;刷头,设置在固定臂顶端。
优选地,光固化管道包括有从外至内依次设置的避光层、外隔离内镜面层、光固化胶管层和内隔离透明层。
优选地,环状辅助透明管双层之间沿轴向等间距均布有与其径向线倾斜的加强筋。
优选地,环状辅助透明管一端沿轴向还均布与其内部连通的固化充气管;充气扎头包括有:环状密封管,一端沿轴向设置有连通软充气管的进气连通管;外螺纹固定接头,内径小于固化充气管外径且沿轴向均布在环状密封管另一端,所述外螺纹固定接头圆周面上设置有沿轴向的收紧口;螺母,同轴拧接在外螺纹固定接头上,工作状态下,所述固化充气管同轴插接在外螺纹固定接头中同轴转动螺母固定连接。
本发明与现有技术相比具有的有益效果是:
1、本发明通过清淤小车自行清洗污水管道,提供工作环境,上游封堵,堵塞待修复污水管相邻的上游污水管道,使得待修复污水管内部无污水流动,从而便于操作;管道清淤和检测,将清淤机器人放置在污水管道内部上游,使得转动臂相对圆柱形机体弯曲,从而使得三工自适应抵接行走脚抵接在污水管道内壁上,将注水管与水管连通,启动轮毂电机使得圆柱形机体在污水管道内行走,启动双工反向驱动器,使得径向冲洗头和刷臂反向同轴转动从而对污水管道进行清淤和监测,同时污水向下游流去,清淤完成后将所述清淤机器人取出;
2、本发明通过环状辅助透明气管撑起光固化管道,相比较传统的直接向光固化管道中充气,效率更高,且便于在充气后安放紫外线管道小车,具体的,铺设垫层,利用牵引绳将底膜拉入污水管道进行铺设垫层,便于将光固化管道在底膜上滑动从而铺设在污水管道内,防止光固化管道外层刮花;铺设光固化管道,利用牵引绳将内部设置有环状辅助透明气管的光固化管道在底膜上滑动从而铺设在污水管内;对环状辅助透明气管内进行充气,即将固化充气管同轴插接在外螺纹固定接头中且旋转螺母收口,即将充气扎头与环状辅助透明气管输入端密封固定,通过气管将固化车输气端与充气扎头连通,固化车向环状辅助透明气管中充气;光固化,待环状辅助透明完全膨胀将光固化管道撑起,将紫外线管道小车穿过充气扎头,启动紫外线管道小车使其在充气状态的环状辅助透明气管中行走,待光固化管道完全固化后将小车从管内取出;拆卸收工,将充气扎头从环状辅助透明气管两端拆下,将环状辅助透明气管从已固化的光固化管道中抽出,切割光固化管道两端多余部分,取出上游封堵,完成修复。
附图说明
图1为本发明的清淤机器人的立体图;
图2为本发明的清淤机器人的俯视图;
图3为图2的A-A截面处的剖视图;
图4为图3的B处局部放大图;
图5为本发明的俯视图;
图6为图5的C-C截面处的剖视图;
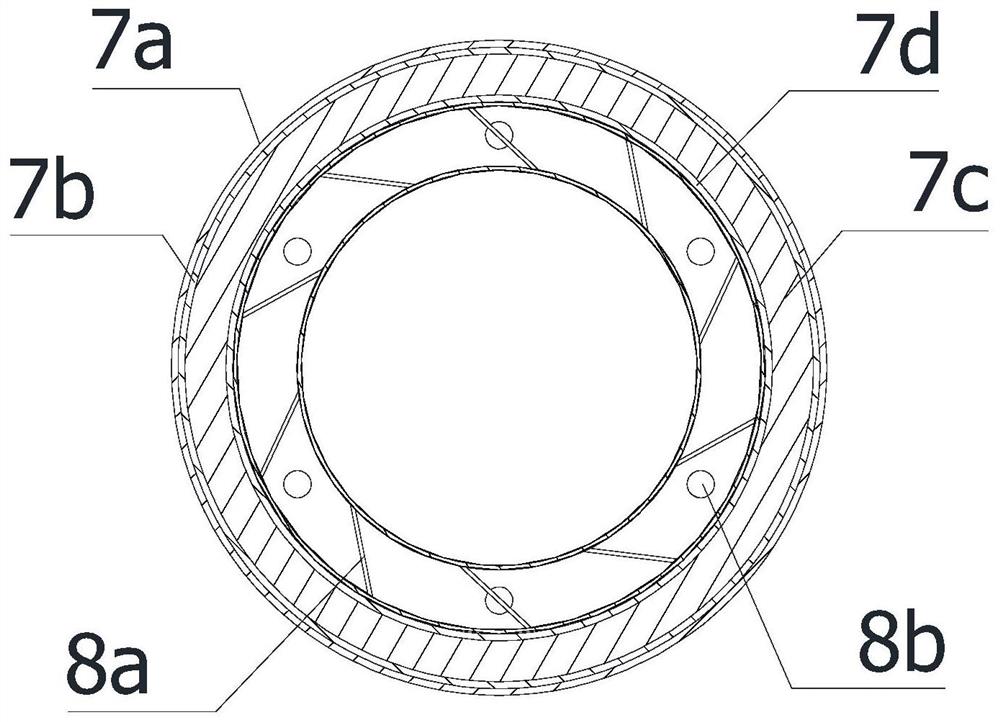
图7为图5的D-D截面处的剖视图;
图8为本发明的环状辅助透明气管的立体图;
图9为本发明的充气扎头的侧视图;
图10为图9的E-E截面处的剖视图。
图中标号为:
1-圆柱形机体;1a-摄像头;
2-三工自适应抵接行走脚;2a-转动座;2b-转动臂;2b1-转动柱;2c-轮毂电机;2d-扭簧;
3-水管;
4-径向冲洗头;4a-连通管;4b-饼状盒;4c-第一喷嘴;4d-第二喷嘴;
5-双工反向驱动器;5a-第一齿轮;5b-伺服电机;5c-第二齿轮;5d-固定轨道圈;5e-内齿圈;5f-转动轨道圈;
6-刷臂;6a-固定臂;6b-刷头;
7a-避光层;7b-外隔离内镜面层;7c-光固化胶管层;7d-内隔离透明层;
8a-加强筋;8b-固化充气管;9a-环状密封管;9a1-进气连通管;9b-外螺纹固定接头;9b1-收紧口;9c-螺母。
具体实施方式
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
参照图6所示,一种雨污水管道的整体紫外光固化修复工艺,包括有以下步骤:
步骤一,上游封堵,堵塞待修复污水管相邻的上游污水管道,使得待修复污水管内部无污水流动,从而便于操作;
步骤二,管道清淤和检测,将清淤机器人放置在污水管道内部上游,由其自行对污水管道进行清淤和监测,清淤完成后将所述清淤机器人取出;
步骤三,铺设垫层,利用牵引绳将底膜拉入污水管道进行铺设垫层,便于将光固化管道在底膜上滑动从而铺设在污水管道内,防止光固化管道外层刮花;
步骤四,铺设光固化管道,利用牵引绳将内部设置有环状辅助透明气管的光固化管道在底膜上滑动从而铺设在污水管内;
步骤五,对环状辅助透明气管内进行充气,将充气扎头与环状辅助透明气管输入端密封固定,通过气管将固化车输气端与充气扎头连通,固化车向环状辅助透明气管中充气;
步骤六,光固化,待环状辅助透明完全膨胀将光固化管道撑起,将紫外线管道小车穿过充气扎头,启动紫外线管道小车使其在充气状态的环状辅助透明气管中行走,待光固化管道完全固化后将小车从管内取出;
步骤七,拆卸收工,将充气扎头从环状辅助透明气管两端拆下,将环状辅助透明气管从已固化的光固化管道中抽出,切割光固化管道两端多余部分,取出上游封堵,完成修复。
如图1所示,清淤机器人包括有:
圆柱形机体1,外圆周面上设置有用于实时监测污水管内情况的摄像头1a;
三工自适应抵接行走脚2,同轴向设置在圆柱形机体1两端;
水管3,同轴贯穿圆柱形机体1;
径向冲洗头4,输入端通过旋转接头与水管3一端转动连接;
双工反向驱动器5,第一工作端与径向冲洗头4同轴固定连接,所述双工反向驱动器5驱动部沿圆柱形机体1轴向设置在圆柱形机体1内部,工作状态下,所述双工反向驱动器5第一工作端和第二工作端同轴反向转动;
刷臂6,与圆柱形机体1同径向且沿圆柱形机体1轴线均布在双工反向驱动器5第二工作端外圆周面上。
在需要对污水管道清淤时,将三工自适应抵接行走脚2工作端相对圆柱形机体1轴线弯折,从而使得三工自适应抵接行走脚2脚部抵接在污水管壁上,从而通过三脚固定作用,使得圆柱形机体1能够在污水管道内平稳行走;圆柱形机体1外表面圆弧面使得淤泥不易在其外表面上堆积,从而使得圆柱形机体1在行走时,摄像头1a能够实时监测污水管道内情况;将水管3一端通过注水软管与其连通,从而启动双工反向驱动器5,使其双工工作端带动径向冲洗头4和刷臂6同轴反向转动,而旋转使得径向冲洗头4工作端转动,从而便于环绕式冲洗污水管壁,而刷臂6能够将污水管壁上污泥刮下,从而便于向下游流去;从而使得污水管壁内相对平整洁净,从而便于铺设光固化管道。
如图2所示,三工自适应抵接行走脚2包括有:
三个转动座2a,沿圆柱形机体1轴线设置在圆柱形机体1外圆周面两端;
转动臂2b,所述转动臂2b上沿圆柱形机体1径向设置有与转动座2a转动连接的转动柱2b1;
轮毂电机2c,轴线与圆柱形机体1轴线垂直转动设置在转动臂2b另一端;
扭簧2d,同轴套设在转动柱2b1上,且两端分别与转动座2a和转动臂2b固定连接。
使得转动臂2b相对转动座2a弯折,从而减小所述轮毂电机2c距圆柱形机体1轴线距离,转动臂2b在扭簧2d弹性作用下使得轮毂电机2c抵接在污水管壁上,转动柱2b1用于转动连接转动座2a和转动臂2b,当启动轮毂电机2c时,所述轮毂电机2c带动圆柱形机体1沿管道轴线自行走,从而便于清淤;三个转动座2a使得圆柱形机体1能够稳定在管道内行走。
如图3所示,径向冲洗头4包括有:
连通管4a,通过旋转接头与水管3一端同轴转动连接,所述旋转接头旋转部通过双工反向驱动器5与刷臂6反向同轴转动连接;
饼状盒4b,与连通管4a同轴固定连接且内部与水管3连通;
第一喷嘴4c,工作端朝外且沿连通管4a轴线均布在饼状盒4b外圆周面上,所述第一喷嘴4c与饼状盒4b内部连通。
当水管3通过旋转接头向连通管4a中注水时,在水压作用下,通过饼状盒4b上安装的第一喷嘴4c沿径向排出,而旋转接头通过双工反向驱动器5与刷臂6反向传动连接,从而使得第一喷嘴4c呈环状转动从而冲洗管道内壁,而刷臂6反向转动,使得能够刮下管壁上淤泥。
如图3所示,径向冲洗头4还包括有第二喷嘴4d,所述第二喷嘴4d沿连通管4a轴线均布在饼状盒4b朝向双工反向驱动器5端面上,所述第二喷嘴4d与饼状盒4b内部连通。
当向连通管4a中注水时,伺服电机5b在水压作用向通过饼状盒4b沿轴向冲洗双工反向驱动器5,从而防止管壁顶端落下的淤泥阻塞双工反向驱动器5正常工作,从而使得清淤工作能够正常进行。
如图4所示,双工反向驱动器5包括有:
第一齿轮5a,同轴固定设置在与径向冲洗头4转动连接的旋转接头上;
伺服电机5b,同轴向设置在圆柱形机体1内部且其输出轴贯穿圆柱形机体1一端通过第二齿轮5c与第一齿轮5a啮合传动连接;
固定轨道圈5d,同轴固定设置在圆柱形机体1一端;
内齿圈5e,一端同轴设置有与固定轨道圈5d同轴转动连接的转动轨道圈5f,所述内齿圈5e内齿与第二齿轮5c啮合传动连接,刷臂6沿第一齿轮5a轴线均布在内齿圈5e外圆周面上。
当启动伺服电机5b时,所述伺服电机5b输出轴带动第二齿轮5c同步转动,而第二齿轮5c分别与第一齿轮5a外啮合和固定轨道圈5d内啮合,从而使得第一齿轮5a和固定轨道圈5d反向同轴转动,从而使得径向冲洗头4与刷臂6反向同轴转动,从而径向冲洗头4在正向冲洗管壁时,刷臂6反向刮除管壁上淤泥,从而使得清淤工作更加充分。
如图3所示,刷臂6包括有:
固定臂6a,沿沿第一齿轮5a轴线均布在内齿圈5e外圆周面上;
刷头6b,设置在固定臂6a顶端。
固定臂6a用于固定连接刷头6b和内齿圈5e,当第一齿轮5a带动内齿圈5e转动时,所述刷头6b同轴转动从而将管壁上淤泥刮下,从而进行清淤操作。
如图6所示,光固化管道包括有从外至内依次设置的避光层7a、外隔离内镜面层7b、光固化胶管层7c和内隔离透明层7d。
避光层7a用于防止在光固化管道在储存过程中受外界紫外线光照而固化;外隔离内镜面层7b用于使得当内部受紫外线光照时,受其镜面反射作用加速光固化胶管层7c固化,且避免光固化胶管层7c与避光层7a之间的粘合;光固化胶管层7c用于内撑固化修复管道;内隔离透明层7d用于避免环状辅助透明管与光固化胶管层7c之间的粘合,同时便于环状辅助透明管撑起光固化胶管层7c。
如图6和图8所示,环状辅助透明管双层之间沿轴向等间距均布有与其径向线倾斜的加强筋8a。
加强筋8a用于连接环状辅助透明管双层,使得环状辅助透明管在充气后能够完整的将光固化管道撑起;而加强筋8a与环状辅助透明管径向线倾斜使得在未充气时,外层与内层贴合,且当充气时,环状辅助透明管受气压影响,内层通过加强筋8a抵接外层使得光固化管道与污水管壁更加贴合,从而便于固化。
如图6和图10所示,环状辅助透明管一端沿轴向还均布与其内部连通的固化充气管8b;充气扎头包括有:
环状密封管9a,一端沿轴向设置有连通软充气管的进气连通管9a1;
外螺纹固定接头9b,内径小于固化充气管8b外径且沿轴向均布在环状密封管9a另一端,所述外螺纹固定接头9b圆周面上设置有沿轴向的收紧口9b1;
螺母9c,同轴拧接在外螺纹固定接头9b上,工作状态下,所述固化充气管8b同轴插接在外螺纹固定接头9b中同轴转动螺母9c固定连接。
将固化充气管8b同轴插接在外螺纹固定接头9b后选择螺母9c,使得螺母9c将收紧口9b1收紧,从而使得外螺纹固定接头9b与固化充气管8b固定连通,通过进气连通管9a1向环状密封管9a中充气,从而使得气体通过固化充气管8b注入连接环状辅助透明管中,从而使得连接环状辅助透明管将光固化管道撑起,从而便于修复污水管道。
本发明的工作原理:
本装置通过以下步骤实现本发明的功能,进而解决了本发明提出的技术问题:
步骤一,上游封堵,堵塞待修复污水管相邻的上游污水管道,使得待修复污水管内部无污水流动,从而便于操作;
步骤二,管道清淤和检测,将清淤机器人放置在污水管道内部上游,使得转动臂2b相对圆柱形机体1弯曲,从而使得三工自适应抵接行走脚2抵接在污水管道内壁上,将注水管与水管3连通,启动轮毂电机2c使得圆柱形机体1在污水管道内行走,启动双工反向驱动器5,使得径向冲洗头4和刷臂6反向同轴转动从而对污水管道进行清淤和监测,同时污水向下游流去,清淤完成后将所述清淤机器人取出;
步骤三,铺设垫层,利用牵引绳将底膜拉入污水管道进行铺设垫层,便于将光固化管道在底膜上滑动从而铺设在污水管道内,防止光固化管道外层刮花;
步骤四,铺设光固化管道,利用牵引绳将内部设置有环状辅助透明气管的光固化管道在底膜上滑动从而铺设在污水管内;
步骤五,对环状辅助透明气管内进行充气,即将固化充气管8b同轴插接在外螺纹固定接头9b中且旋转螺母9c收口,即将充气扎头与环状辅助透明气管输入端密封固定,通过气管将固化车输气端与充气扎头连通,固化车向环状辅助透明气管中充气;
步骤六,光固化,待环状辅助透明完全膨胀将光固化管道撑起,将紫外线管道小车穿过充气扎头,启动紫外线管道小车使其在充气状态的环状辅助透明气管中行走,待光固化管道完全固化后将小车从管内取出;
步骤七,拆卸收工,将充气扎头从环状辅助透明气管两端拆下,将环状辅助透明气管从已固化的光固化管道中抽出,切割光固化管道两端多余部分,取出上游封堵,完成修复。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
- 一种雨污水管道的整体紫外光固化修复工艺
- 一种排污管道的整体紫外光固化修复工艺