手机5G网络远程共享控制钓真鱼机器人
文献发布时间:2023-06-19 09:41:38
技术领域
本发明属于钓鱼机械设备技术领域,具体涉及一种能够远程手动或自动进行更换钓饵、抛甩鱼杆、溜鱼、摘鱼以及放鱼留鱼动作的手机5G网络远程共享控制钓真鱼机器人。
背景技术
钓鱼不但是陶冶情操的一项竞技娱乐活动,而且也是广大钓鱼爱好者的一项锻炼体能和意志的体育运动项目;它可以减轻人们的工作疲劳和精神压力,因此受到广大钓鱼爱好者的喜爱。目前,由于可钓鱼的水域在逐渐减少、且越来越远,钓鱼爱好者不得不长途跋涉去钓鱼,给身体和精神带来不必要的负担,使本来陶冶情操的一项娱乐活动变了味。
现有通过网络远程控制的钓鱼设备,大体上都存在着不能手动(自动)抛甩钓钩、钓饵成型、更换钓饵、摘鱼放鱼等问题。并且,一些远程控制的电动鱼竿,钓场还需要安排许多的服务人员,负责更换钓饵、摘鱼放留等工作。另外,一些非接触式换饵的垂钓设备,由于摘完的鱼带钩,所以无法实现绿色环保放生。故为了解决钓鱼领域存在的上述问题,达到钓鱼爱好者远程钓鱼的愿望,有必要对现有技术的远程钓鱼的方式和装置予以改进。
发明内容
本发明就是针对上述问题,提供一种能够远程手动或自动进行更换钓饵、抛甩鱼杆、溜鱼、摘鱼以及放鱼留鱼动作的手机5G网络远程共享控制钓真鱼机器人。
本发明所采用的技术方案是:该手机5G网络远程共享控制钓真鱼机器人包括抛甩杆机器、摘鱼换铒钳口机器、钓饵成型机器、摘鱼拨棍机器、放鱼储鱼机器和电气控制系统,其特征在于:所述摘鱼换铒钳口机器布置在抛甩杆机器的前方,所述钓饵成型机器位于摘鱼换铒钳口机器的右前方;摘鱼拨棍机器位于摘鱼换铒钳口机器的左前方;所述放鱼储鱼机器则设置在所述摘鱼换铒钳口机器的前下方。
所述抛甩杆机器由标准鱼竿构成,所述标准鱼竿通过前卡箍和后卡箍紧固在旋转套座上,且旋转套座键连接在垂直面回转的悬臂轴端上,悬臂轴的另一端轴连接着行星减速步进电机;所述悬臂轴能够在弯板上的垂直面内回转,该弯板下平面紧固在水平回转支承轴承的动圈上,所述回转支承轴承的定圈固定在抛甩杆机器的机架上;所述机架由四个可调节的支承腿支承;所述标准鱼竿的后端部通过前卡箍和后卡箍固定在悬臂轴上,且后卡箍固定套的后部设置有配重块;同时,所述标准鱼竿上设置有鱼讯传感器和电动鱼线轮,从电动鱼线轮出来的钓鱼线,经过鱼讯传感器延伸到标准鱼竿的前端,钓鱼线的前端系有无倒刺鱼钩、坡莫合金鱼坠、红外线光鱼漂;所述水平回转支承轴承的动圈的大齿轮与小齿轮啮合,小齿轮与行星减速步进电机的轴端键联接。
所述标准鱼竿上设置的鱼讯传感器,由磁体-霍尔元件组合体的第一霍尔传感器和管状摆动导线管及弹簧组成;磁体-霍尔元件组合体组件由螺钉紧固在固定支架上,固定支架的下部设置有用于与标准鱼竿相连的联接卡环,支架竖直设置在固定座的上方,铰接着管状摆动导线管,管状摆动导线管上焊接着拱门状感应铁丝,管状摆动导线管被拉弹簧拉紧使导磁铁丝与磁体-霍尔元件组合体的磁体表面紧密接触。
所述磁体-霍尔元件组合体组件是由磁铁与霍尔片贴合组成在L形弯片组件上,而且磁铁的S级贴合在霍尔片正面上;所述L形弯片组件由螺钉紧固在固定支架上。
所述鱼讯传感器的前部设置有管状摆臂,管状摆臂内穿有钓鱼线,在中鱼后通过钓鱼线的拉动,使管状摆臂的拱门状导磁铁丝摆动离开第一霍尔传感器的磁体-霍尔元件组合体的磁体表面,并将动作信号直接传递给现场共享控制钓真鱼机器人的上位计算机。上位计算机将先行调用储存中的短程序进行自动控制钓鱼机器人的相关驱动步进电机,进行钓鱼和溜鱼,客户端的手机可滞后接续控制;手机5G共享控制钓真鱼机器人的控制子程序,可由机器人本身在操作过程中学习和修改控制程序。
所述摘鱼换铒钳口机器由钳口总成、平行四杆提升机构和滑台组成;所述钳口总成由左右钳柄及销轴组成,左右钳柄由左右连杆铰接而成,与机架铰链联接;左右钳柄端头分别铰接左右卡爪,左右卡爪连杆铰轴又分别与左右推杆端头铰接,左右推杆的另一端头铰接在钳口夹紧T型螺杆的铰轴上;同时,所述钳口夹紧T型螺杆与步进电机内螺纹联接,并由步进电机螺旋副驱动,步进电机与钳口总成的机架由螺栓固定;所述左右钳柄的钳柄上镶嵌的一个磁体-霍尔元件组合体组件,为第二霍尔传感器;该磁体-霍尔元件组合体组件由磁铁与霍尔片贴合组成,而且磁铁的S级贴合在霍尔片正面上。
所述钳口总成的钳口夹紧T型螺杆,可在钳口张开拉杆的内圆滑动,通过钳口推杆后销轴垂直固联在钳口夹紧T型螺杆上,且与钳爪张开推杆和钳口夹紧滑块的开口槽相联接;所述钳口推杆后销轴通过钳口夹紧滑块以及钳口卡紧弹簧,可推动钳口夹紧滑块和钳口张开拉杆的轴肩使钳口闭合和张开;钳口推杆后销轴可在钳口张开拉杆和钳口夹紧滑块的开口槽间前后运动,推动铰接在钳口推杆后销轴两端的左右钳爪推杆,推动钳爪推杆端部铰接的左右卡爪,使其张大和闭小;所述的钳口张开拉杆外圆柱套接着钳口卡紧滑块,钳口卡紧滑块左端与钳口张开拉杆的轴肩相联接;右端与钳口卡紧弹簧相接,钳口卡紧弹簧的另一端与随动弹簧座及锁紧螺母相联接。
所述平行四杆提升机构包括上连杆和下连杆,上连杆和下连杆的其中一端分别铰接在钳口总成的机架上,另一端分别铰接在钳口弯板支架上、形成平行四杆机构;所述下连杆铰链副键联在悬壁轴上,悬壁轴被端面联接在钳口弯板支架上的减速步进电机驱动,下连杆的端头配有圆盘型配重;所述上连杆的端头铰接在钳口弯板支架上,形成平行四杆提升机构;钳口弯板支架与滑板螺栓紧固联接在滑板上;所述滑板上设置有四个由螺栓紧固联接的滑块,四个滑块与两条滑轨组成滑动副接触相联,两条滑轨与摘鱼换铒钳口机器的底板螺栓紧固联接;所述滑板的下面联接一个传动弯板,传动弯板上又水平联接一个传动螺母,传动螺母与传动丝杠以螺旋传动副相联接,长传动丝杠的左端由固定轴承座支承;并且,长传动丝杠的另一端由步进电机及电机弯板组件支承,步进电机可驱动摘鱼换铒钳口机器的滑板和钳口总成前后运动;同时,在摘鱼换铒钳口机器的前方两侧还分别设置联接翼扳,前左侧为摘鱼联接翼板,前右侧为钓饵成形联接翼板。
所述钓饵成型机器由钓饵成型器、饵料仓机构、饵料仓推进机构组成;所述钓饵成型器由钓饵成形室、钓饵挡板、第三钓饵成形霍尔传感器组件、钓钩和钓饵推出柱塞组成;所述钓饵成形室柱体腔两侧的钓饵导管向后弯曲相汇于钓饵成型机联接法兰端面处;钓饵成形室上面铰接着对称的两个钓铒挡板,两个钓铒挡板分别由两个钓饵挡板拉杆铰接,钓饵挡板拉杆的另一端与拉杆横梁的两端相铰接,拉杆横梁孔装在钓饵推出柱塞上,钓饵推出柱塞与步进电机的螺杆以螺旋副相联。以利用步进电机的驱动将已完成形的钓饵推出,同时推动拉杆横梁推动两个钓饵挡板拉杆,将两个钓铒挡板张开,以推出已成型钓饵。
所述第三钓饵成形霍尔传感器组件,由磁铁与霍尔传感器贴合的组件和霍尔传感器组导套以及导线组成,所述霍尔传感器组件由磁铁的S级贴合在霍尔传感器正面上组成。
所述第三钓饵成形霍尔传感器组件的导杆中部与上弹簧销轴垂直联接,上弹簧销轴两端头分别挂接两个拉力弹簧,两个拉力弹簧的另一端分别挂接在下弹簧销轴的两端;所述下弹簧销轴垂直横穿联接在拉杆横梁和钓饵推出柱塞上,当钓饵推出柱塞被步进电机钓饵推出T型螺杆拉动上下运动时,则下弹簧销轴带动两个拉力弹簧拉动上弹簧销轴;上弹簧销轴被定位卡片限位后,间歇地拉动第三钓饵成形霍尔传感器组件运动。
所述钓饵成型器的法兰端面与钓饵挤出仓前端盖的前法兰端面螺栓联接,所述钓饵挤出仓由钓饵挤出活塞、缸筒、钓饵挤出仓前端盖和钓饵挤出仓后端盖组成;钓饵挤出活塞由连杆销轴与钓饵挤出步进电机的钓饵挤出T型螺杆端部相联接,该钓饵挤出步进电机端面与开槽电机弯板螺栓相联接,所述开槽电机弯板下平面与滑轨螺栓联接;缸筒的钓饵挤出仓后端盖与开槽气缸弯板螺栓联接,所述弯板下平面与滑轨螺栓联接;钓饵挤出仓前端盖又与滑轨螺栓联接,滑轨与开槽推臂螺栓联接,推臂头部与步进电机螺杆头部铰接联接,被钓饵仓进退步进电机螺杆驱动;所述滑轨与与后滑块和前滑块以滑动副相联接,所述两个滑块和钓饵成型机底板螺栓联接,所述钓饵成型机底板的后端由可调节高度的支腿总成支承,左侧由左侧联接轴与摘鱼换饵钳口机总成的前右侧的钓饵成形联接翼板相联。
所述摘鱼拨棍机器包括摘鱼拨棍,摘鱼拨棍固联在大齿轮上,大齿轮中心可围绕摘鱼挡丝回转,带动摘鱼拨棍回转进行摘鱼;摘鱼挡丝穿过大齿轮的中心孔,摘鱼挡丝由摘鱼挡丝前支架和摘鱼挡丝后支架拉紧支承;大齿轮与小齿轮平行啮合,均被约束在开槽摘鱼步进电机弯板上;小齿轮与步进电机的轴径键联接,步进电机端面以螺栓联接在弯板上且被其驱动;弯板的下平面紧固在摘鱼机滑板上,摘鱼机滑板与摘鱼机前后滑块以滑动副相联,摘鱼机前后滑块紧固在摘鱼机底板上;同时,在摘鱼机滑板上螺栓联接着开槽推臂,所述开槽推臂的头部与摘鱼机进退步进电机的摘鱼机T型螺杆头部相铰接,由摘鱼机T型螺杆驱动;摘鱼机底板的右端由可调支腿总成支承,左端由右侧联接轴与摘鱼换饵钳口机总成的前左侧的摘鱼联接翼板相联接。
所述放鱼存鱼机器由鱼网兜总成构成,所述鱼网兜总成由鱼网兜U型框加鱼网兜横梁和鱼网兜组成一个可翻转的鱼网兜总成;鱼网兜U型框的两个销轴与鱼网兜总成的电机轴插孔安装,由左锁紧手轮和右锁紧手轮锁紧;鱼网兜总成的电机轴由减速步进电机驱动。以完成翻转放鱼储鱼的任务。
所述电气控制系统包括与Internet网上的远程服务器进行通讯的远程上位计算机及下位机组;远程上位计算机可串行分组段控制下位机组,每一组段均由15台单片机组成一台钓鱼机组;RS485串行通讯可带255个下位机,这样可组成17组段,即组成17台共享控制钓鱼机器人;并且,上位计算机通讯时可根据现场组段应用情况发给客户端;且通过客户端发出控制组段的数字编码进行控制。
所述客户端是智能手机通过GPRS、WIFI、4G、5G等移动网络接入Internet网,或笔记本电脑和台式电脑通过无线WIFI或固定网线接入Internet网。
所述智能手机的APP界面就是现场钓鱼的真实视频画面,在图像画面中还夹着可滑动的十字命令光标、控制条和开关;所述十字命令光标可上下、左右滑动,每次滑动结束后十字光标自动回中位;向上滑动十字命令光标可使鱼杆上扬,向下滑动十字命令光标可使鱼杆下降;向左滑动十字命令光标可使鱼杆左转,向右滑动十字命令光标可使鱼杆右转;转换‘钳口’开关时,向上滑动十字命令光标可使钳口上升,向下滑动十字命令光标可使钳口下降;向左滑动十字命令光标可使饵料仓左行,向右滑动十字命令光标可使饵料仓右行;转换‘滑台’开关时,向上滑动十字命令光标可使滑台前行,向下滑动十字命令光标可使滑台后行;转换‘拨棍’开关时,向右滑动十字命令光标可使拨棍逆时针转动(摘鱼),向左滑动十字命令光标可使拨棍顺时针转动(摘鱼回程);钳口夹紧(夹紧)、饵料仓饵料挤出(挤出)、已完钓饵推出(钓饵推出)、摘鱼拨棍进退(拨棍进退)、放鱼存鱼(放存鱼)和预留兜鱼(兜鱼)均为开关量控制;抛竿总成鱼线轮用点动正负开关的方法控制,点动正上升,点动负下降,不点不动。
所述家用电脑和笔记本电脑等客户端,可通过WIFI或固定网线接入Internet网,可应用软件通过键盘和鼠标的左右键及手轮等实施控制十字命令光标和开关,控制共享控制钓鱼机器人,如:拨动鼠标滚轮可控制鱼线轮松放鱼线。
本发明的有益效果:由于本发明包括抛甩杆机器、摘鱼换铒钳口机器、钓饵成型机器、摘鱼拨棍机器、放鱼储鱼机器和电气控制系统,摘鱼换铒钳口机器布置在抛甩杆机器的前方,钓饵成型机器位于摘鱼换铒钳口机器的右前方;摘鱼拨棍机器位于摘鱼换铒钳口机器的左前方;放鱼储鱼机器则设置在摘鱼换铒钳口机器前下方的结构形式,所以其设计合理,结构紧凑,钓鱼者应用智能手机通过5G、4G、GPRS、WIFI等分组数字无线网络接入互联网络,控制与互联网远程服务器相连的钓鱼机器人的上位机以及下位机组,远程共享手动或自动控制钓真鱼机器人进行换钓饵、抛竿、溜鱼、摘鱼、放鱼等方面的钓鱼活动。手机5G网络远程共享控制钓真鱼机器人不仅是互联网络远程钓鱼者喜爱的项目,而且也为广大钓鱼爱好者提供了远程在线观赏,在线竞猜、竞赛的网络真实钓鱼的娱乐活动。
附图说明
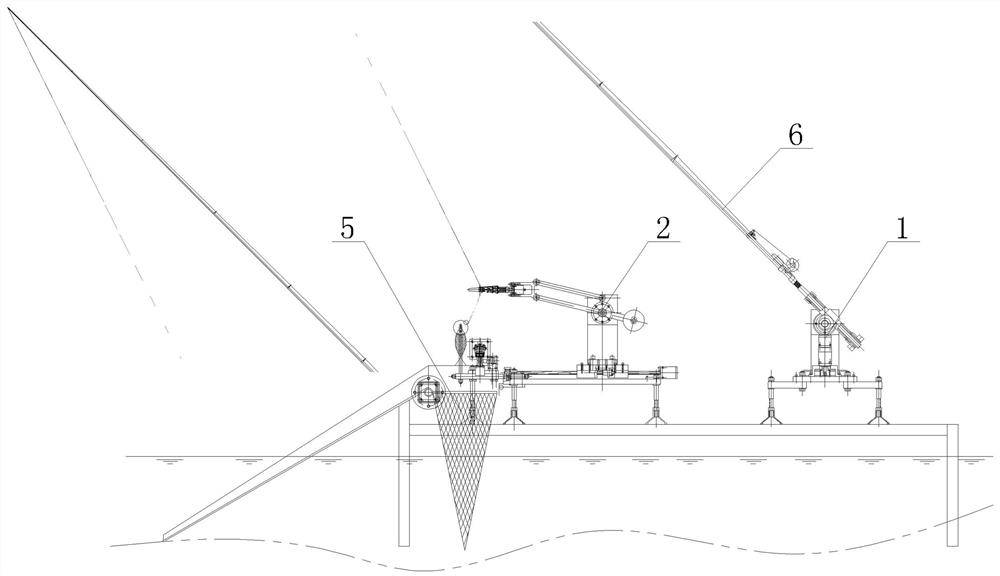
图1是本发明的一种结构示意图。
图2是摘鱼、换饵、钳口、放鱼存鱼机总成图。
图3是图2的俯视图。
图4是抛竿总成图。
图5是图4的侧视图。
图6是霍尔鱼讯传感器总成图。
图7是图6的侧视图。
图8是摘鱼、换饵钳口机总成图。
图9是图8的侧视图。
图10是钳口总成图。
图11是图10的俯视图(钳口张开)。
图12是图11中的钳口刚夹紧的一种使用状态示意图。
图13是图12中的钳口夹紧摘鱼的一种使用状态示意图。
图14是钓饵成型器图。
图15是图14的俯视图。
图16是图14的侧视图(动作前)。
图17是图14的侧视图(动作后)。
图18是图14中的钓饵成型传感器总成图。
图19是图18的侧视图。
图20是钓饵成型机总成图。
图21是图20的俯视图。
图22是摘鱼机总成图。
图23是图22的俯视图。
图24是放鱼存鱼机总成图。
图25是图24的俯视图。
图26是本发明的网络通讯流程图。
图27是本发明的步进电机控制原理图(之一)。
图28是本发明的步进电机控制原理图(之二)。
图中序号说明:1抛甩杆机器、2摘鱼换铒钳口机器、3钓饵成形机器、4摘鱼拨棍机器、5放鱼存鱼机器、6标准鱼竿、7第一鱼讯霍尔传感器总成、8电动鱼线轮、9前卡箍、10后卡箍、11配重、12垂直回转步进电机、13行星减速器、14抛竿总成L支架、15抛竿主轴、16卡箍旋转套座、17水平回转行星减速步进电机、18传动小齿轮、19抛竿总成底板、20大齿轮、21延长支腿、22红外线光鱼漂、23坡莫合金鱼坠、24无倒刺鱼钩、25导磁铁丝、26管状摆臂、27鱼讯传感器支架、28磁铁、29霍尔传感器、30螺钉、31弹簧、32摆动轴套、33卡环、34钳口总成、35上连杆、36下连杆、37钳口弯板支架、38配重、39上连杆转动小轴、40下连杆驱动轴、41步进行星减速机、42滑板、43滑轨、44联接翼板、45底板、46步进电机、47传动丝杠、48传动螺母、49传动弯板、50滑块、51支腿总成、52轴承座、53右右卡爪、54鱼坠、55钳口推杆前销轴、56钳口销轴、57钳爪推杆、58钳口推杆后销轴、59卡爪销轴、60右钳柄、61左钳柄、62钳口连杆动销轴、63钳口连杆、64钳口连杆定销轴、65钳口张开拉杆、66钳口夹紧滑块、67钳口卡紧弹簧、68钳口夹紧T型螺杆、69随动弹簧座、70钳口夹紧步进电机、71第二钳口霍尔传感器组件、72钓饵推出步进电机、73钓饵推出T型螺杆、74钓饵推出柱塞、75钓饵自动成型机机体、76下弹簧销轴、77拉力弹簧、78上弹簧销轴、79定位卡片、80柱塞套、81钓饵挡板长销轴、82钓饵挡板短销轴、83钓饵挡板、84钓饵挡板拉杆、85钓钩、86第三钓饵成型霍尔传感器组件、87钓饵成型室、88拉杆横梁、89钓饵成型机联接法兰、90钓饵导管、91导线、92磁铁、93霍尔传感器、94霍尔传感器组导套、95钓饵成型器、96钓饵挤出仓前端盖、97钓饵储存仓、98摘鱼挡丝前支架、99钓饵挤出活塞、100钓饵挤出仓后端盖、101连杆销轴、102钓饵挤出T型螺杆、103钓饵挤出步进电机、104开槽电机弯板、105后滑块、106支腿总成、107钓饵成型机底板、108开槽气缸弯板、109前滑块、110滑轨、111钓饵仓进退步进电机、112钓饵仓进退步进电机底板、113钓饵仓进退T型螺杆、114开槽推臂、115左侧连联接轴、116左侧连联接板、117摘鱼拨棍、118大齿轮、119转动芯轴、120拨棍步进电机、121摘鱼挡丝、122摘鱼挡丝后支架、123小齿轮、124开槽摘鱼步进电机弯板、125摘鱼机滑轨、126右侧联接板、127摘鱼机底板、128摘鱼机前后滑块、129支腿总成、130右侧联接轴、131销轴、132开槽推臂、133摘鱼机T型螺杆、134摘鱼机进退步进电机底板、135摘鱼机进退步进电机、136鱼网兜、137鱼网兜U型框、138鱼网兜横梁、139左锁紧手轮、140电机轴、141右锁紧手轮、142减速步进电机、143Android手机和平板电脑客户端、144笔记本电脑和台式计算机客户端、145 5G、4G、GPRS、wifi无线网络、146客户端服务器、147远程服务器、148 internet网、149远程上位计算机、150第一组段手机5G无线网络远程共享控制钓真鱼机器人、151第二组段手机5G无线网络远程共享控制钓真鱼机器人、152步进电机、153步进电机驱动器、154 RS485串行控制器、155直流电源、156抛竿总成鱼线轮电机、157网络摄像机。
具体实施方式
根据图1~28详细说明本发明的具体结构。该手机5G网络远程共享控制钓真鱼机器人包括抛甩杆机器1,摘鱼换铒钳口机器2,钓饵成型机器3,摘鱼拨棍机器4,放鱼存鱼机器5,和电气控制系统等组成。其位置关系是:抛甩杆机器1布置在摘鱼换铒钳口机器2的后方,钓饵成型机总成3位于摘鱼换铒钳口机2的右前方,摘鱼拨棍机器4位于摘鱼换铒钳口机2的左前方;放鱼存鱼机器5布置在所述的摘鱼换铒钳口机2器前下方。设置在抛甩杆机器1上的标准鱼竿6的鱼线上还布置有鱼漂22鱼坠23鱼钩24,标准鱼竿6上还卡装有霍尔鱼讯传感器总成7电动鱼线轮8。标准鱼竿6被前卡箍9和后卡箍10及配重11卡装在卡箍旋转套座16上。该卡箍旋转套座16键联在抛竿主轴15上,被步进电机12和行星减速器13减速驱动,驱动标准鱼竿6在抛竿总成L支架14上垂直旋转。抛竿总成L支架14下面固定在水平旋转的轴承20的动齿圈上,定圈固定在抛竿总成底板19上,该抛竿总成底板19由4个延长支腿21支承。水平旋转的轴承20的动齿圈与小齿轮18啮合,被水平旋转驱动减速步进电机组17驱动。驱动抛竿总成L支架14和标准鱼竿6进行水平旋转。
为了中鱼后,服务端计算机能够自动控制钓鱼装置1,进行钓鱼和溜鱼等动作,标准鱼竿6上设置的鱼讯传感器7由导磁铁丝25摆动导线管26鱼讯传感器支架27磁铁28霍尔传感器29螺钉30弹簧31摆动轴套32和卡环33组成。摆动导线管26与导磁铁丝25为钎焊联接为一体,被弹簧31拉动围绕摆动轴套32的固定螺钉转动使导磁铁丝25贴紧由磁铁28和霍尔元件29组成的第一渔汛霍尔传感器组件的磁铁面上,该组件又被螺钉30紧定在鱼讯传感器支架27上。鱼讯传感器7由卡环33卡装在标准鱼竿6上。从电动鱼线轮8出来的钓鱼线穿过摆动导线管26延伸到标准鱼竿6的前端。通过钓鱼线的拉动,使动导线管26上部设置的导磁铁丝25离开第一渔汛霍尔传感器组件上的磁铁面,将相关动作信号传递给服务端的上位计算机,上位计算机将自动地控制下位抛甩杆机器1和电动鱼线轮8按照设定的程序自动地进行钓鱼和溜鱼。
为了配合完成抛竿、钓饵成型和摘鱼工序的任务,设计了摘鱼换铒钳口机器2,其主要工作部件钳口总成34与上连杆35和下连杆36相铰接,下连杆36端头还联接有配重38,上连杆35与上连杆转动小轴39和下连杆中部与下连杆驱动轴40分别形成铰接,与钳口支架37形成平行四杆机构。下连杆36中部与下连杆驱动轴40以键联接,被步进行星减速机41减速驱动,使钳口总成34平行上下移动。L形钳口支架37与滑板42以螺栓联接,滑板42下面由螺栓联接四个滑块50,滑块50与滑轨43以滑动副相接,滑轨43与底板45为螺栓联接,底板45由四条可调支腿总成51相支承。底板45前两侧又由螺栓联接两个联接翼板44。在滑板42的下面螺栓联接着传动弯板49,在传动弯板49的垂直面上螺栓联接着传动螺母48,传动螺母48与传动丝杠47以螺旋副相接,传动丝杠47的前端由轴承座52支承,后端与步进电机46的轴相联接,步进电机46驱动时,驱动传动丝杠47转动,推动传动螺母48以及传动弯板49前后移动,带动滑板42、钳口支架37及上下连杆35和36等,使主要工作部件钳口总成34前后移动,配合完成抛竿、钓饵成型和摘鱼工序的任务。
钳口总成34主要由左右钳柄60,左右钳口连杆63,钳口张开拉杆65和钳口销轴56铰接组成。在左钳柄60还安装有由磁铁和霍尔传感器组成的第二钳口霍尔传感器组件71。左右钳柄60的端部分别与左右钳口连杆63及钳口连杆动销轴62铰接,左右钳口连杆63另一端分别由钳口连杆定销轴64铰接在机架61上。钳口张开拉杆65与钳口夹紧滑块66以环形轴肩接触,且套装在钳口张开拉杆65上。钳口夹紧滑块66与钳口卡紧弹簧67一端相接,另一端与随动弹簧座69相接。左右钳爪推杆57交汇端与钳口夹紧滑块66和钳口张开拉杆65以及钳口夹紧T型螺杆68通过钳口推杆后销轴58联接。钳口张开拉杆65与钳口夹紧滑块66外圆滑动联接,与钳口夹紧T型螺杆68内圆滑动联接。钳口夹紧T型螺杆68与钳口夹紧步进电机70螺纹联接。左右钳爪推杆57与左右卡爪53通过左右钳口推杆前销轴55相铰接。钳口夹紧步进电机70转动驱动钳口夹紧T型螺杆68前后移动驱动钳口推杆后销轴58前后移动,因在钳口张开拉杆65和钳口夹紧滑块66上开有槽孔,因而可推动右右卡爪53张开或大张开,防止摘鱼时与摘鱼挡丝120相碰撞干涉。
钓饵成型器95的端法兰89由螺栓联接在钓饵挤出仓前端盖96的端法兰面上。钓饵推出柱塞74的下部以螺纹与步进电机的螺杆轴以螺旋副相接。钓饵推出柱塞74与柱塞套80滑动相联,柱塞套80静配合联接在钓饵自动成型机机体75上。钓饵推出柱塞74的柱塞体上横穿着拉杆横梁88,拉杆横梁88的两端与左右钓饵挡板拉杆84下端铰接相联,左右钓饵挡板拉杆84的上端通过左右钓饵挡板短销轴82与左右钓饵挡板83短销轴孔相铰接,拉动左右钓饵挡板83张开和闭合,配合钓饵成型。垂直拉杆横梁88和钓饵推出柱塞74又穿入一个下弹簧销轴76,在弹簧销轴76的两端各挂有拉力弹簧77,拉力弹簧77的另一端又挂一根上弹簧销轴78,上弹簧销轴78同时穿过第三钓饵成型霍尔传感器组件86和钓饵推出柱塞74。在钓饵自动成型机机体75上开有槽孔,以便使钓饵推出柱塞74上的弹簧销轴78和76通过,在上下弹簧销轴78和76之间又由螺钉紧定两个定位卡片79可对上弹簧销轴78进行定位限制,以便限制钓钩85在钓饵成型室87的位置(见图17)。在钓饵推出柱塞74上弹簧销轴78处也开有槽孔以便上弹簧销轴78下行时让位。第三钓饵成型霍尔传感器组件86由磁铁92的S级与霍尔传感器93正面粘接贴合且封装在非导磁金属铜外壳体94内以及导线组成。
钓饵成形机总成3主要由钓饵挤出活塞99、钓饵挤出仓97、钓饵挤出仓前端盖96和钓饵成型器95组成。钓饵挤出活塞99通过连杆销轴101与钓饵挤出T型螺杆102销轴联接,钓饵挤出T型螺杆102与钓饵挤出步进电机103的内螺纹以螺旋副联接,当钓饵挤出步进电机103正传时可推动钓饵挤出T型螺杆102前行,通过连杆销轴101推动钓饵挤出活塞99,将钓饵挤出仓97的钓饵挤出,经钓饵挤出仓前端盖96的端面法兰挤入钓饵成型器95中。钓饵挤出步进电机103由螺栓联接在开槽电机弯板104上,钓饵挤出仓97通过钓饵挤出仓后端盖100也由螺栓联接在开槽气缸底板108上,开槽电机底板104和开槽气缸底板108又联接在滑轨110上,又与后滑块105和前滑块109以滑动副联接,后滑块105和前滑块109又与钓饵成型机底板107由螺栓联接。钓饵成型机底板107后端由支腿总成106支承。前部与左侧连联接板116螺栓联接。由螺母紧定在左侧联接板116内的左侧联接轴115可与右侧联接翼板44联接。螺栓联接在开槽推臂114与钓饵仓进退T型螺杆113铰轴联接。钓饵仓进退步进电机111转动可驱动T型螺杆113前后运动,从而驱动钓饵挤出仓97和钓饵成型器95进退,以便确定钓饵成型器的位置以及退让摘鱼。
摘鱼拨棍机器4主要部件摘鱼拨棍117由键固联在大齿轮118上,大齿轮118带动摘鱼拨棍117围绕摘鱼挡丝121回转。大齿轮被小齿轮123驱动,小齿轮123又被拨棍步进电机120轴联驱动。开槽摘鱼步进电机底板124螺栓联接在摘鱼机滑轨125上。摘鱼挡丝121穿过转动芯轴119中心孔。一端螺钉固定在摘鱼挡丝后支架122上,另一端螺钉固定在摘鱼挡丝前支架98上。当摘鱼拨棍117围绕转动芯轴119回转的同时可沿着摘鱼挡丝121移动。摘鱼机滑轨125与摘鱼机前后滑块128以滑动副联接,摘鱼机前后滑块128螺栓联接在摘鱼机底板127上。摘鱼机底板127的后端由支腿总成129支承,前端由螺栓联接在右侧联接板126的右侧联接轴130联接在联接翼板44上。摘鱼机滑轨125螺栓联接着开槽推臂132,开槽推臂132通过销轴131与摘鱼机T型螺杆133铰接,摘鱼机T型螺杆133与摘鱼机进退步进电机135的内螺母以螺旋副联接,摘鱼机进退步进电机135与摘鱼机进退步进电机底板134端面螺栓联接,摘鱼机进退步进电机底板螺栓固定在摘鱼机底板127上。摘鱼机进退步进电机转动时,驱动摘鱼机T型螺杆133,通过销轴131推动开槽推臂132;推动摘鱼机滑轨125上的部件摘鱼拨棍117前后移动,完成摘鱼工序任务。
放鱼存鱼机总成5,根据钩鱼者的需求,钓到鱼不放生的,可以暂存在摘鱼换铒钳口机器2前方的放鱼存鱼机总成5的存鱼鱼网兜136内。放鱼存鱼机总成5为翻转结构。翻转存鱼鱼网兜136由鱼网兜门字框137和鱼网兜横梁138穿结组成。鱼网兜门字框137可穿结在电机轴140上,由左锁紧手轮139和右锁紧手轮141锁紧,减速步进电机142转动时,驱动电机轴140转动,带动鱼网兜门字框137、鱼网兜横梁138和鱼网兜136翻转,完成放鱼和存鱼工序的任务。
手机5G无线网络远程共享控制钓真鱼机器人设备的智能手机客户端143通过5G、4G、GPRS、WIFI等分组数字无线网络接入互联网络148;另一组客户端144是笔记本电脑和台式电脑通过无线WIFI或固定网线接入Internet网络148与Internet网上的远程服务器147相接的共享控制钓鱼机器人的上位计算机149及下位机进行通讯。上位计算机149可串行分组段控制下位机组,每一组段均由15台单片机组成一台钓鱼机组。RS485串行通讯可带255个下位机,这样可组成17组段,即组成17台共享控制钓鱼机器人。
远程上位计算机通讯时可根据现场组段应用情况发给客户端,客户端的手机APP决定发出某控制组段的数字编码进行控制(见网络通讯流程图26)。智能手机、笔记本电脑和台式电脑等客户端首先与Internet网上远程服务器相连的上位机数据通讯勾通建立付款协议并取得远程RS485串行组段后,然后通过存入客户端软件数字编码和数据进行控制。通过手机或电脑远程现场视频图像操作屏幕上的十字光标以及转换开关等进行数字控制远程共享钓鱼机器人完成:鱼竿的升降、鱼竿回转、钳口夹紧、鱼线的收放、钳口的升降、钳口滑台的进退、钓饵仓的进退、钓饵挤出、摘鱼拨棍进退、摘鱼拨棍回转、钓饵成型和推出、放储鱼网兜翻转、网络摄像机控制及视频等工作任务。
智能手机的APP界面就是现场钓鱼的真实视频画面,在图像画面中还夹着可滑动的十字命令光标、控制条和开关。所述的十字命令光标可上下、左右滑动,每次滑动结束后十字光标自动回中位。向上滑动十字命令光标可使鱼杆上扬,向下滑动十字命令光标可使鱼杆下降;向左滑动十字命令光标可使鱼杆左转,向右滑动十字命令光标可使鱼杆右转。转换‘钳口’开关时,向上滑动十字命令光标可使钳口上升,向下滑动十字命令光标可使钳口下降;向左滑动十字命令光标可使饵料仓左行,向右滑动十字命令光标可使饵料仓右行;转换‘滑台’开关时,向上滑动十字命令光标可使滑台前行,向下滑动十字命令光标可使滑台后行。转换‘拨棍’开关时,向右滑动十字命令光标可使拨棍逆时针转动(摘鱼),向左滑动十字命令光标可使拨棍顺时针转动(摘鱼回程)。钳口夹紧(夹紧)、饵料仓饵料挤出(挤出)、已完钓饵推出(钓饵推出)、摘鱼拨棍117进退(拨棍进退)、放鱼存鱼(放存鱼)和预留兜鱼(兜鱼)均为开关量控制。抛竿总成鱼线轮用点动正负开关的方法控制,点动正上升,点动负下降,不点不动。例如手机客户端,当钓鱼者通过手机APP用手指向上滑动十字光标时,则鱼竿上升;当手指向下滑动十字光标时,则鱼竿下降。另外,家用电脑和笔记本电脑等另类客户端,可通过WIFI或固定网线接入Internet网,可应用软件通过键盘和鼠标的左右键及手轮等实施控制十字命令光标和开关,控制共享控制钓鱼机器人,例如:拨动鼠标滚轮可控制鱼线轮松放鱼线。
网络摄像机157的图像也是手机APP的控制画面背景之一,现场有多个现场画面供切换选用,可摆角及聚焦调整。红外线功能网络摄像机157除夜间钓鱼用,也可提供另一种鱼讯信号。伴音基本是现场环境声音,也可是音乐伴音。手机APP的控制内容还应有网络联系、付款、鱼获截图、付款留鱼等控制功能。
服务端除了被智能手机远程共享控制上位计算机以及下位机控制外,其服务端现场的上位计算机具有对下位机自动控制功能,以缩短客户端与伺服端间的通讯时间,减少客户端的繁琐操作和减少手机APP的编写内容,使钓鱼的过程连续。现场第一鱼讯霍尔传感器总成7发讯时,现场的钓鱼机器人的上位计算机应及时地先行对抛竿垂直回转步进电机和水平回转行星减速步进电机以及抛竿电动鱼线轮8电机进行自动控制,弥补客户端视频传输时间滞后的影响,以便客户端钓鱼者及时地切入溜鱼模式。
当手动将鱼钩送到钓饵成型机构的第三钓饵成型霍尔传感器组件的磁铁面上方时,钓饵成型机构的霍尔传感器发讯,现场钓鱼机器人的上位计算机应及时地控制饵料仓饵料挤出步进电机和饵料仓进退步进电机以及已完钓饵推出步进电机,按照储存在计算机储存器里的子程序进行自动的将钓饵完成形并推出。将鱼钩送到钓饵成型机构的第三钓饵成型霍尔传感器组件的磁铁面上方的过程,也可选用自动模式。也就是说按照储存在上位计算机储存器里的子程序可以自动地控制钳口升降步进减速电机和钳口进退滑台步进电机以及钓饵挤出步进电机和饵料仓进退步进电机进行自动地将无倒刺鱼钩24送到钓饵成型机构的第三钓饵成型霍尔传感器组件的磁铁面上方,以便自动地完成钓饵的成型和推出。
钓鱼者也可选用自动模式进行自动钓鱼。当现场的上位机接到客户端自动钓鱼的指令和传感器发出的工作命令后,便可直接发出寄存器里的相对应数字编码进行控制远程共享钓鱼机器人的某种工作内容。例如:客户端将钓鱼模式开关拨到自动时,当第一鱼讯霍尔传感器7发讯时,则现场的远程共享钓鱼机器人将先行控制该机组自动地完成钓鱼、溜鱼的任务,客户端可滞后接续控制,使钓鱼的过程连续不卡盹。又如在自动钓鱼模式下,手动(自动)将鱼钩送至第三钓饵成型霍尔传感器86的磁铁面上方时,则现场的远程共享钓鱼机器人将自动地完成钓饵成型并将钓饵推出,以及接续自动完成抛钩或甩钩的任务。
客户端也可选用手动或自动弹杆和甩杆模式,将带钓饵的鱼钩组件抛到钓窝处。所述的弹杆模式就是自动或手动摘完鱼后,通过摘鱼换铒钳口机器2的钳口将鱼坠54继续夹紧,然后调整鱼竿的角度及适当地拉紧鱼线,突然松开钳口靠鱼竿的弹性将带钓饵的无倒刺鱼钩24组件抛到钓窝处。甩杆模式就是先将摘鱼换铒钳口机器2的钳口松开,调整鱼竿的角度和鱼线的长度,旋转鱼竿在恰当的位置落杆和松放鱼线将带钓饵的无倒刺鱼钩24组件甩抛到钓窝处。
摘鱼模式也可以选用手动或自动模式,手动模式就是手动控制鱼杆的仰角和电动鱼线轮8鱼线的长度,将已上钩的鱼获和鱼坠54拉到摘鱼换铒钳口机器2的钳口处,通过第二钳口霍尔传感器组件发讯将鱼坠54被钳口卡紧。手动控制摘鱼换铒钳口机器2围绕摘鱼挡丝121运动和控制摘鱼拨棍117运动,手动将鱼获摘掉。自动模式就是把经手动学习后,已存在上位计算机储存器里的子程序调出,自动地控制上述摘鱼过程。以便节约过程时间。摘鱼拨棍117进退步进电机和饵料仓进退步进电机的进退时,可通过相关的已完命令返回数字信息进行脱机自动控制返回。
在远程服务端的上位计算机的储存器里储存了所需的应用子程序为自动控制模式调用,控制共享控制钓鱼机器人机组中的下位步进电机工作。各工序间衔接可通过前一工序已完命令的返回上位计算机的数字信息+暂停后进行自动控制下一个工序;事实上,各工序的控制都是脱机(开环)控制。
- 手机5G网络远程共享控制钓真鱼机器人
- 手机5G网络远程共享控制钓真鱼机器人