手术器械、从操作设备及手术机器人
文献发布时间:2023-06-19 09:43:16
技术领域
本发明涉及医疗器械领域,特别是涉及一种手术器械以及应用该手术器械的从操作设备以及具有该从操作设备的手术机器人。
背景技术
微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。
随着科技的进步,微创手术机器人技术逐渐成熟,并被广泛应用。微创手术机器人通常包括主操作控制台及从操作设备,主操作控制台用于根据医生的操作向从操作设备发送控制命令,以控制从操作设备,从操作设备用于响应主操作控制台发送的控制命令,并进行相应的手术操作。
从操作设备上连接有可以与从操作设备可拆卸的手术器械,手术器械包括驱动装置和用于执行手术的末端执行器,驱动装置用于将手术器械连接到从操作设备并接收来自从操作设备的驱动力以驱动末端执行器运动,驱动装置通过驱动缆绳与末端执行器连接,驱动装置通过驱动缆绳来操纵末端执行器的运动。末端执行器一般包括三个自由度的运动,即自转、俯仰运动和偏航运动,有些末端执行器还具有自转运动,其中偏航运动由一组的驱动缆绳控制的,俯仰运动的驱动缆绳是由另外一组的驱动缆绳控制的,由于末端执行器的俯仰运动和偏航运动正交,因此在末端执行器进行俯仰运动时,控制俯仰的驱动缆绳与控制偏航的驱动缆绳之间存在耦合关系,即控制俯仰的驱动缆绳的运动受限制于控制偏航的驱动缆绳,因此需要解除两者之间的这种耦合关系。现有技术采用的是软件解耦的方法,但软件解耦的方法的算法比较复杂,增加了系统控制程序的复杂度,而且软件解耦的方法会在数据采集的时候存在误差,因此不能精确的解除两者之间的耦合关系。
发明内容
基于此,为解决上述问题,本发明提供一种手术器械、应用该手术器械的从操作设备以及具有该从操作设备的手术机器人。手术器械包括末端执行器、驱动装置及缆绳,驱动装置被配置为通过缆绳驱动末端执行器运动,缆绳包括用于驱动末端执行器执行偏航运动的第一对缆绳和第二对缆绳,及用于驱动末端执行器执行俯仰运动的第三对缆绳,上述驱动装置包括:
驱动单元,驱动单元通过第三对缆绳操纵末端执行器的俯仰运动;
解耦机构,解耦机构包括主解耦件和从解耦件,主解耦件与驱动单元同轴设置,从解耦件包括用于与主解耦件相抵接的滑架,从解耦件还包括设置在滑架两端供第一对缆绳和第二对缆绳导向的第一导向部和第二导向部,主解耦件用于与驱动单元同轴旋转并推动滑架运动以增加第一对缆绳和第二对缆绳中的其中一对缆绳在驱动装置内的长度并减少其中另一对缆绳在驱动装置内的长度,以使驱动单元驱动末端执行器执行俯仰运动。
优选地,上述滑架上形成有用于容纳主解耦件的第一开口,主解耦件用于在第一开口内与滑架相抵接并驱动滑架沿直线运动。
优选地,上述驱动单元和主解耦件沿第一方向旋转增加第一对缆绳在末端执行器上的长度和减少第二对缆绳在末端执行器上的长度,并且滑架在主解耦件的推动下运动从而减少第一对缆绳在驱动装置内的长度并增加第二对缆绳在驱动装置内的长度。
优选地,上述驱动单元和主解耦件沿与第一方向相反的第二方向旋转而减少第一对缆绳在末端执行器上的长度和增加第二对缆绳在末端执行器上的长度,并且滑架在主解耦件的推动下运动从而增加第一对缆绳在驱动装置内的长度并减少第二对缆绳在驱动装置内的长度。
优选地,上述驱动单元与主解耦件沿第一方向或第二方向旋转使得第一对缆绳在末端执行器上的长度的变化量等于主解耦件在驱动装置内的移动距离的四倍。
优选地,上述滑架具有第一凸体和第二凸体,凸轮结构包括在主解耦件轴向上下相互错开设置的第一凸轮和第二凸轮,主解耦件旋转使第一凸轮抵触第一凸体并且第二凸轮抵触第二凸体从而推动滑架运动。
优选地,上述第一凸轮和/或第二凸轮在垂直于主解耦件的旋转轴的平面上的投影的外轮廓具有渐开线,主解耦件旋转时渐开线到主解耦件的旋转轴的距离的变化量与主解耦件绕旋转轴转过的角度之间具有线性的变化关系。
优选地,所外轮廓还包括位于渐开线两端的第一圆弧和第二圆弧,渐开线到主解耦件的旋转轴的距离从渐开线与第一圆弧连接的一端到渐开线与第二圆弧连接的一端逐渐增加。
优选地,上述驱动装置还包括第一导向轮和第二导向轮,第一对缆绳经过第一导向轮导向后再经过第一导向部的导向后延伸至末端执行器,第二对缆绳经过第二导向轮后导向后然后再经过第二导向部的导向后延伸至末端执行器,滑架的运动方向与第一对缆绳在第一导向轮和第一导向部之间的部分平行,滑架的运动方向与第二对缆绳在第二导向轮和第二导向部之间的部分平行。
优选地,上述驱动装置还包括第三导向轮,第一对缆绳在第一导向部和末端执行器之间的部分经过第三导向轮的导向后延伸至末端执行器。
优选地,上述驱动装置还包括第四导向轮,第二对缆绳在第二导向部和末端执行器之间的部分经过第四导向轮的导向后延伸至末端执行器。
优选地,上述驱动装置还包括安装座,安装座包括第一凸台和位于第一凸台上的第二凸台,第二凸台用于安装第一导向轮、第二导向轮、第三导向轮以及第四导向轮。
优选地,上述滑架还具有第二开口,第二开口用于容纳第二凸台。
一种从操作设备,从操作设备包括机械臂和上述手术器械,手术器械安装在机械臂上,机械臂用于操纵手术器械运动。
一种手术机器人,手术机器人包括主操作控制台和上述从操作设备,从操作设备根据主操作控制台的指令执行相应操作。
本发明的手术器械使用机械结构解除操纵末端执行器俯仰运动的驱动缆绳与操纵末端执行器偏航运动的驱动缆绳之间的耦合关系,能非常精确可控地解除两者之间的耦合关系,使用机械解耦能减少了整个手术机器人的程序算法,使手术机器人的运行更加稳定。
附图说明
图1为本发明一实施例的手术机器人的从操作设备的结构示意图;
图2为本发明一实施例的手术机器人的主操作控制台的结构示意图;
图3为本发明一实施例的从操作设备的机械臂的结构示意图;
图4为本发明一实施例的手术器械的结构示意图;
图5A-5D为本发明一实施例的末端执行器的结构示意图;
图5E为本发明一实施例的驱动缆绳在长轴内的结构示意图;
图6A为本发明一实施例的末端执行器的第一支撑架的立体图;
图6B为本发明一实施例的末端执行器的第一支撑架的俯视图;
图6C为本发明另一实施例的末端执行器的第一支撑架的俯视图;
图7A-7B为本发明一实施例的末端执行器的俯仰状态下的示意图;
图7C为图5A所示的实施例中的末端执行器在俯仰-偏航-张开状态下的示意图;
图8A为本发明一实施例的驱动装置的示意图;
图8B和8C为图8A所示的驱动装置中的第一驱动缆绳和第二驱动缆绳在导向轮上绕线的局部示意图;
图8D-8E为图8A的驱动装置的解耦过程示意图;
图9A为本发明一实施例的驱动装置的示意图;
图9B为图9A所示的驱动装置的解耦过程示意图;
图10A为本发明一实施例的驱动装置的示意图;
图10B为图10A所示的驱动装置的解耦过程示意图;
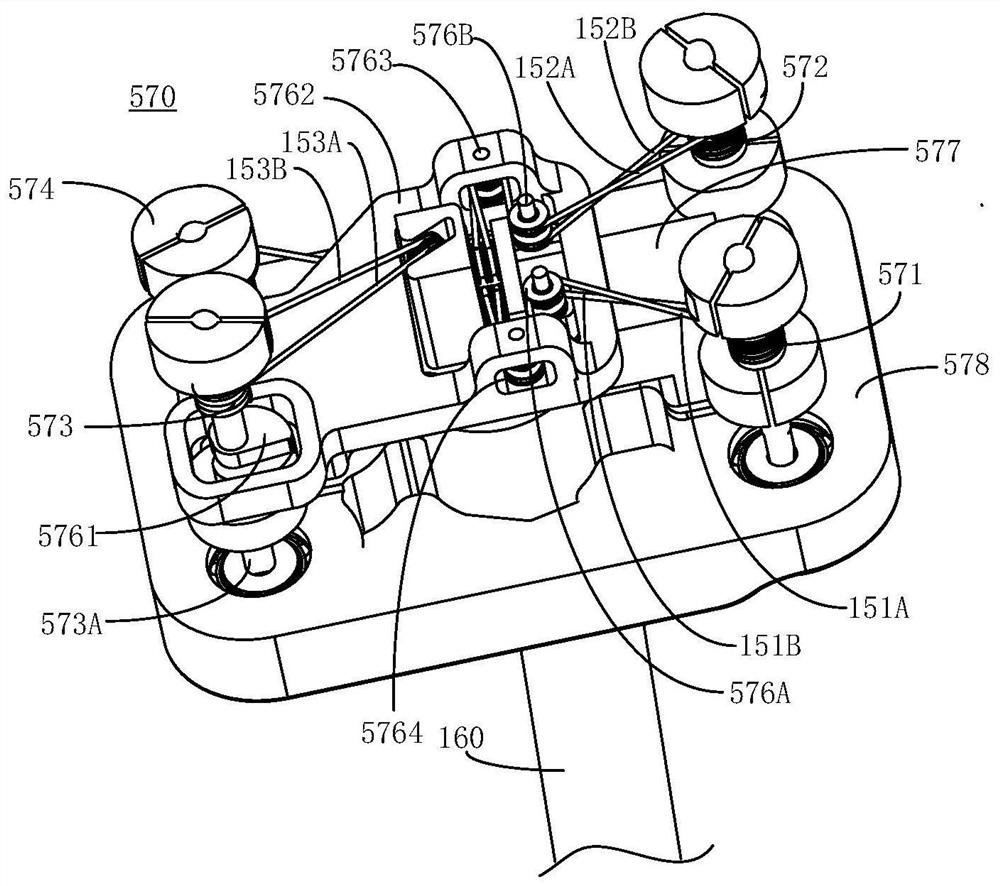
图11A为本发明一实施例的驱动装置的立体图;
图11B为本发明图11A的俯视图;
图11C为图11A所示的实施例中的解耦机构和安装座的爆炸图;
图11D为图11A所示的实施例中的主解耦件的俯视图;
图11E为图11A所示的实施例的解耦过程示意图。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
需要说明的是,当元件被称为“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。当一个元件被认为是“耦合”另一个元件,表明至少一个元件的变化会受另一个元件的限制,“解耦”即解除耦合关系,表明具有耦合关系的两个元件不再具有耦合关系,一个元件的变化不再受另一元件的限制。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。本文所使用的术语“远端”、“近端”作为方位词,该方位词为介入医疗器械领域惯用术语,其中“远端”表示手术过程中远离操作者的一端,“近端”表示手术过程中靠近操作者的一端。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
微创手术机器人一般包括从操作设备和主操作控制台,图1所示为本发明一实施例的从操作设备100,图2为本发明一实施例的主操作控制台200,外科医生在主操作控制台200上进行对从操作设备100的相关控制操作,从操作设备 100根据主操作控制台200的输入指令执行对人体的外科手术。主操作控制台 200和从操作设备100可以置于一个手术室内,也可以置于不同的房间,甚至主操作控制台200和从操作设备100可以相距很远,例如主操作控制台200和从操作设备100分别位于不同的城市,主操作控制台200与从操作设备100可以通过有线的方式进行数据的传输,也可以通过无线方式进行数据的传输,例如主操作控制台200与从操作设备100位于一个手术室内,两者之间通过有线的方式进行数据的传输,又如主操作控制台200与从操作设备100分别在不同的城市,两者之间通过5G无线信号进行远距离数据传输。
如图1所示,从操作设备100包括多个机械臂110,每个机械臂110包括多个关节和一个持械臂130,多个关节联动以实现持械臂130的多个自由度的运动,持械臂130上安装有用于执行外科手术的手术器械120,手术器械120穿过固定在持械臂130远端的套管针140进入人体体内,机械臂110用于操纵手术器械 120运动以执行手术。手术器械120可拆卸地安装在持械臂130上,从而可以随时更换不同类型的手术器械120或取下手术器械120以对手术器械120进行冲洗或消毒。如图3所示,持械臂130包括持械臂本体131和器械安装架132,器械安装架132用于安装手术器械120,器械安装架132可以在持械臂本体131上滑动,进而带动手术器械120沿持械臂本体131前进或退出。
如图4所示,手术器械120包括分别位于手术器械120近端的驱动装置170 和远端的末端执行器150,以及位于驱动装置170和末端执行器150之间的长轴 160,驱动装置170用于与持械臂130的器械安装架132相连接,器械安装架132 内具有多个致动器(图未示出),多个致动器与驱动装置170进行接合,以将致动器的驱动力传输给驱动装置170。长轴160用于连接驱动装置170和末端器械 150,长轴160是中空的,供驱动缆绳穿过,驱动装置170通过驱动缆绳操纵的末端执行器150的运动,以使末端执行器150执行相关手术操作。
图5A-图5D为本发明一实施例的末端执行器150的结构示意图,如图5A所示末端执行器150包括第一支架210和第二支架220,第一支架210的远端包括第一支柱314和第二支柱315,第一支架210的近端包括底架316,底架316的一端与长轴160相连接,从底架316的另一端朝末端执行器150的远端延伸形成第一支柱314和第二支柱315,第一支柱314、第二支柱315以及底架316形成大致U形夹的结构。
在第一支柱314与第二支柱315之间设置有第一销311和第二销312,第一销311一端固定连接在第一支柱314上,其另一端固定连接在第二支柱315上,同样的,第二销312的一端固定连接在第一支柱314上,其另一端固定连接在第二支柱315上,第二销312与第一销311并排地设置在第一支柱314和第二支柱315上,其中第一销311比第二销312更靠近第一支架210的底架316。
为更好的展示末端执行器150的近端的结构,在图5B和图5C中没有显示第一支架210,如图5B和图5C所示,第一销311上设置有第一滑轮组,第一滑轮组包括依次设置在第一销311上的第一滑轮211、第二滑轮212、第三滑轮213 和第四滑轮214,第二销312上设置有第二滑轮组,第二滑轮组包括依次设置在第二销312上的第五滑轮215、第六滑轮216、第七滑轮217以及第八滑轮218,第一滑轮211至第八滑轮218都是用于引导驱动缆绳,由于用于引导驱动缆绳的滑轮都设置在第一支架上210,第二支架220上没有滑轮,因此第二支架220的体积可以制造的更小,使得末端执行器150的体积更小,并且不会存在滑轮脱落的风险。
第二支架210上设置有第三支柱317、第四支柱318以及俯仰轮319,从俯仰轮319上沿末端执行器150的远端延伸形成第三支柱317和第四支柱318,第三支柱317、第四支柱318以及俯仰轮319构成大致U型架的形状,第二支架 220的俯仰轮319安装在第二销312上,第二支架220可以围绕经过第二销312 的轴线的AA’旋转以实现末端执行器150的俯仰运动。
第二支架220的第三支柱317和第四支柱318之间设置有第三销313,第三销313一端固定连接在第三支柱317另一端固定连接在第四支柱318上,第三销 313与第一销311、第二销312相互垂直。末端执行器150的夹持部包括第一夹持部230和第二夹持部240,第一夹持部230和第二夹持部240通过第三销313 可转动地设置在第二支架220上,第一夹持部230和第二夹持部240可以围绕经过第三销313的轴线BB’旋转,以实现末端执行器150的开合和/或偏航运动,第一夹持部230和第二夹持部240可以是用于夹持组织的钳夹,或用于缝合的吻合器、或者用于电烧灼的烧灼器等。
如图5A-5D所示,图5A和5B所示中的方向标识是为了更方便描述驱动缆绳在末端执行器150上的绕线方式,标识中的远端和近端是指末端执行器150 的远端和近端方向,前、后、左、右是指在图5A和5B是视角下末端执行器150 的前部方向、后部方向、左部方向以及右部方向,其他如图虽然没有方向标识,但能根据图5A和5B较容易的推导出末端器械执行器150方向,设置在末端执行器150的驱动缆绳包括用于操纵末端执行器150开合和/或偏航运动第一对缆绳和第二对缆绳,用于操纵末端执行器150俯仰运动第三对缆绳,第一对缆绳包括第一驱动缆绳151A和第二驱动缆绳151B,其中第一驱动缆绳151A和第二驱动缆绳151B的一端可以是连在一起也可以是分开的,对于第二对缆绳和第三对缆绳是如此。第二对缆绳包括第三驱动缆绳152A和第四驱动缆绳152B,第三对缆绳包括第五驱动缆绳153A以及第六驱动缆绳153B。如图5E所示,每条驱动缆绳都包括3段,以第一驱动缆绳151A为例,第一驱动缆绳151A包括用于连接到驱动装置内的第一段缆绳151A1,用于连接到末端执行器的第二段缆绳151A2,第一段缆绳151A1和第二段缆绳151A2之间使用刚性的条形件151A3相连接,这样的结构相比使用整条驱动缆绳传输效率更高,而且也容易产生多条驱动缆绳在长轴160内交缠的情况。可以理解的是,在其他的一些实施例中,驱动缆绳也可以一条完整而未分段的缆绳。
在末端执行器150一侧上,第一对缆绳在第一滑轮组和第二滑轮组上的绕线方式与第二对缆绳在第一滑轮组和第二滑轮组上的绕线方式相反,第一对缆绳的第一驱动缆绳151A在第一滑轮组和第二滑轮组上的绕线方式与第二驱动缆绳151B在第一滑轮组和第二滑轮组上的绕线方式相同,第二对缆绳的第三驱动缆绳152A在第一滑轮组和第二滑轮组上的绕线方式相同与第四驱动缆绳152B 在第一滑轮组和第二滑轮组上的绕线方式相同。具体地,第一驱动缆绳151A的近端连接到驱动装置170内的驱动单元上,第一驱动缆绳151A的远端经过第一滑轮211的前部的导向后朝末端执行器150的远端延伸,并经过第五滑轮215的后部后导向后继续沿末端器械150的远端延伸并最后固定在第一夹持部230 上。第二驱动缆绳151B经过第四滑轮214的前部导向后朝末端执行器150的远端延伸,并经过第八滑轮218的后部导向后继续朝末端执行器150的远端延伸并最后固定在第一夹持部230上。第三驱动缆绳152A的远端经过第二滑轮212 后部的导向后朝末端执行器150的远端延伸,并经过第六滑轮216的前部导向后继续朝末端器械150的远端延伸并固定在第二夹持部240上,第四驱动缆绳 152B的远端经过第三滑轮213的后部导向后朝末端执行器150的远端延伸,并经过第七滑轮217的前部导向后继续朝末端器械150的远端延伸并过渡在第二夹持部240上。
第一驱动缆绳151A和第二驱动缆绳151B一起驱动第一夹持部230围绕轴线 BB’旋转,第三驱动缆绳152A和第四驱动缆绳152B一起驱动第二夹持部240 围绕轴线BB’旋转,进而第一驱动缆绳151A、第二驱动缆绳151B、第三驱动缆绳152A以及第四驱动缆绳152B一起驱动第一夹持部230和第二夹持部240执行开合和/或偏航运动。
第三对缆绳的第五驱动缆绳153A和第六驱动缆绳153B的近端到驱动装置 170,两者的远端被容纳在俯仰轮319的环形槽内,两者的末端分别固定在第二支架220内,第五驱动缆绳153A和第六驱动缆绳153B一起驱动第二支架220 沿轴线AA’旋转,进而第二支架220带动第一夹持部230和第二夹持部240一起沿轴线AA’进行俯仰运动。
本发明末端执行器150的结构和驱动缆绳的绕线方式都和现有的末端执行器不同,现有的末端执行器的第一滑轮组设置在末端执行器的第一支架上,第二滑轮组设置在第二支架上,第二滑轮组跟随第二支架的一起进行俯仰运动。另外本发明驱动缆绳的绕线方式也与现有技术不同,本发明的驱动缆绳经过上述的绕线方式后,如图5A-5D所示,第一对缆绳的第一驱动缆绳151A在第五滑轮215与第一夹持部230之间存在第一部分缆绳151Aa,第一对缆绳的第二驱动缆绳151B在第八滑轮218与第一夹持部230之间存在第二部分缆绳151Ba,第二对缆绳的第三驱动缆绳152A在第六滑轮216与第二夹持部240之间存在第三部分缆绳152Aa,第二对缆绳的第四驱动缆绳152B在第七滑轮217与第一夹持部240之间存在第四部分缆绳152Ba,其中,无论末端执行器150如何俯仰运动,第一部分缆绳151Aa与第二部分缆绳151Ba始终位于平面M的同侧,第三部分缆绳152Aa与第四部分缆绳152Ba始终位于平面M的另一侧的同侧,平面M 为经过第二销312的轴线AA’并垂直第三销313的轴线BB’的平面。第一部分缆绳151Aa与第二部分缆绳151Ba始终位于平面M的同侧,第三部分缆绳152Aa 与第四部分缆绳152Ba始终位于平面M的另一侧的同侧,使得第一对缆绳和第二对缆绳在末端执行器150上的绕线比较简单、工整,装配时也较容易。
如图5C、5D所示,第一驱动缆绳151A和第二驱动缆绳151B从第一支架 210(图5C和图5D中为便于展示驱动缆绳未显示第一支架210)分别到第一滑轮211和第四滑轮214之间具有第五部分缆绳151Ab和第六部分缆绳151Bb,第三驱动缆绳152A和第四驱动缆绳151B从第一支架210分别到第二滑轮212 和第三滑轮213之间具有第七部分缆绳152Ab和第八部分缆绳152Bb,第五部分缆绳151Ab和第六部分缆绳151Bb都位于平面P的同侧,平面P是指同时经过第一销311的轴线和第二销312的轴线平面,第七部分缆绳152Ab和第八部分缆绳152Bb都位于平面P的另一侧的同侧。
如图6A和6B所述,第一支架210的底架316上具有多个用于为驱动缆绳穿过的通孔,多个通孔包括用于为第一驱动缆绳151A的第五部分缆绳151Ab的通过第一通孔219a,用于第二驱动缆绳151B的第六部分缆绳151Bb通过的第二通孔219b,用于第三驱动缆绳152A的七部分缆绳152Ab通过的第三通孔 219c、用于第四驱动缆绳152B的第八部分缆绳152Bb通过的第四通孔219d、用于第五驱动缆绳153A通过的第五通孔219e以及用于第六驱动缆绳153B通过的第六通孔219f。为了使第一驱动缆绳151A和第二驱动缆绳151B、第三驱动缆绳152A和第四驱动缆绳152B在末端执行器150俯仰运动时能同时进行相同的变化(例如长度同时增加或减少),第一通孔219a和第二通孔219b位于平面P 的同一侧,第三通孔219c和第四通孔位于平面P的另一侧,而且即经过第一通孔219a又经过第二通孔219b的圆心的直线与即经过第三通孔219c的圆心又经过第四通孔219d的圆心的直线平行,由于存在这种平行关系,可以使得驱动缆绳能穿过第一支架210的底架316上的通孔笔直延伸至第一滑轮组,从而使驱动缆绳驱动效率比较高。
如图6B所示,第一通孔219a、第二通孔219b、第三通孔219c以及第四通孔219d分别位于梯形的四个顶点上,使得第一驱动缆绳151A和第二驱动缆绳 151B分别通过外侧的第一滑轮211和第四滑轮214,第三驱动缆绳152A和第四驱动缆绳152B分别通过位于内侧的第二滑轮212和第三滑轮213,为了使在驱动末端执行器150俯仰运动时第五驱动缆绳153A和第六驱动缆绳153B的驱动力损失较小,第五通孔219e和第六通孔219f都位于第一通孔219a、第二通孔 219b、第三通孔219c、第四通孔219d组成的梯形的外部。
另一实施例如图6C所示位于第一支架310中的第一通孔319a第二通孔 319b、第三通孔319c以及第四通孔319d分别位于平行四边形的四个顶点上,第五通孔319e和第六通孔319f都位于第一通孔319a、第二通孔319b、第三通孔319c、第四通孔319d组成的平行四边形的外部。
现有技术的第一驱动缆绳的第五部分缆绳和第二驱动缆绳的六部分缆绳分别位于平面P的异侧,第三驱动缆绳的七部分缆绳和第四驱动缆绳的第八部分缆绳也分别位于平面P的异侧,反映在第一支架上的供驱动缆绳通过的通孔分布上则供第一对缆绳的第一驱动缆绳和第二驱动缆绳通过的两通孔分别位于平面P的异侧,供第二对缆绳的第三驱动缆绳和第四驱动缆绳通过的两通过也分别位于平面P的异侧。由于本发明的末端执行器和现有的末端执行器存在整个结构和绕线方式的不同,使得本发明的末端执行器相对于现有技术更安全,驱动缆绳和滑轮相对现有技术不容易脱落,末端器械的装配也更加容易,整个末端器械的体积也更小。虽然本发明的末端器械相对于现有技术存在上述优点,但本发明的末端器械也带来了新的挑战,即现有的末端执行器的驱动装置无法驱动本发明的末端执行器,更具体地,现有的末端执行的驱动装置使用的解耦第三对缆绳和第一对缆绳、第二对缆绳的耦合关系的方法不再适用本发明的末端执行器。
以下详细说明末端器械150的第三对缆绳和第一对缆绳和/或第二对缆绳之间的耦合关系,如图5所示,第一部分缆绳151Aa、第二部分缆绳151Ba、第三部分缆绳152Aa以及第四部分缆绳152Ba分别离开第五滑轮215、第八滑轮218、第六滑轮216和第七滑轮217的切点都为位于平面a上,平面a为经过第一轴线 AA’并垂直上述平面P的平面。
当欲使末端执行器150执行俯仰运动时,则需驱动装置170收拉第三对缆绳的第五驱动缆绳153A或第六驱动缆绳153B,使得第二支架220带动第一夹持部230和第二夹持部240一起围绕第一轴线AA’俯仰运动,如图7A和7B所示,驱动装置170收拉第六驱动缆绳153B,使得第二支架220以及第一夹持部230 和第二夹持部240围绕第一轴线AA’俯仰运动,若末端执行器150只执行俯仰运动,则需要维持第一部分缆绳151Aa、第二部分缆绳151Ba、第三部分缆绳152Aa 以及第四部分缆绳153Ba的长度恒定不变,否则会引起末端执行器150的偏航或开合运动。
在末端执行器150从图5A-5D所示的笔直状态旋转到图7A-7B所示的俯仰状态的过程中,在驱动装置170收拉第六驱动缆绳153B时,假若末端执行器150 需要转过的目标俯仰角度是α,则平面a需要从图5D中的位置也旋转α角度到图7A的平面b的位置,假若第一滑轮组和第二滑轮组的半径均为r1,为了使末端执行器150成功旋转目标的俯仰角度α,此时必须使得第一驱动缆绳151A和第二驱动缆绳151B分别在第五滑轮215和第八滑轮218上的包角长度同时增加长度L,其中L=α*r1,而相应的第三驱动缆绳152A和第四驱动缆绳152B分别在在第六滑轮216和第七滑轮217上的包角长度同时减少了长度L。而如图8A 所示,在驱动装置170内,第一驱动缆绳151A和第二驱动缆绳151B以相反方向绕在可旋转的第一驱动单元171上,第三驱动缆绳152A和第四驱动缆绳152B 以相反方向绕在可旋转的第二驱动单元172上,而第一驱动单元171和第二驱动单元172是旋转地固定在其旋转轴线上的,故第一驱动单元171和第二驱动单元172是无法平移的,因此仅依靠旋转第一驱动单元171无法使得第一驱动缆绳151A和第二驱动缆绳151B的长度同时增加或减少,同样地,旋转第二驱动单元172也无法使得第三驱动缆绳152A和第四驱动缆绳152B的长度同时增加或减少,而如上所述,若要成功使末端执行器150的执行俯仰运动又必须要使得第一驱动缆绳151A和第二驱动缆绳151B的在末端执行器150上的长度同时增加或减少,第三驱动缆绳152A和第四驱动缆绳152B的在末端执行器上的长度必须同时减少或增加,故第三对缆绳的运动受限制于第一对缆绳、第二对缆绳。
将这种一个元件的变化受另一个元件的限制的关系称之为耦合关系,即一个元件与另一元件之间存在耦合关系。对于第一对缆绳、第二对缆绳以及第三对缆绳而言这种受限制的关系即可以是第三对缆绳由于受限制于第一对缆绳和/或第二对缆绳,从而导致第三对缆绳完全无法运动,使得末端执行器无法实现俯仰运动,也可以是第三对缆绳由于受限制于第一对缆绳和/或第二对缆绳,从而第一对缆绳、第二对缆绳和第三对缆绳之间的任一条缆绳运动,都会引发其他缆绳不期望的运动,从而导致末端执行器也发生不期望的运动而无法执行期望的操作,例如,当第三对缆绳在操纵末端执行器俯仰运动时,由于第三对缆绳与第一对缆绳和/或第二对缆绳之间存在耦合关系,第三对缆绳的运动会同时导致第一对缆绳和/或第二对缆绳的运动,从而末端执行器在俯仰运动的同时会引起末端执行器的开合和/或偏航运动,导致末端执行器的俯仰运动与开合和/或偏移运动相互影响,末端执行器的俯仰运动与开合和/或偏移运动相互不独立,使得末端执行器150无法正确的执行手术操作。因此需要解除第三对缆绳和第一对缆绳和/或第二对缆绳之间的这种耦合关系,使第三对缆绳的运动不再受限制于第一对缆绳和/或第二对缆绳,两者之间的运动能相互独立、互不干扰或影响,将这种解除第三对缆绳和第一对缆绳和/或第二对缆绳之间这种耦合关系称之为解耦。
对于如何解除上述耦合关系,一种现有的解耦方法是使用软件算法进行解耦,主操作控制台200控制第三驱动单元驱动第三对缆绳运动的同时,也控制第一驱动单元和第二驱动单元驱动第一对缆绳和第二对缆绳运动,以使第一对缆绳和第二对缆绳随第三对缆绳的运动在滑轮上的包角长度增加或减少,但这种解耦方法需要使末端执行器上的第一对缆绳的第一部分缆绳151Aa和第二部分缆绳151Ba分别位于平面M的异侧,第二对缆绳的第三部分缆绳152Aa和第四部分缆绳152Ba也分别位于平面M的异侧,以使第一对缆绳的第一驱动缆绳 151A和第二驱动缆绳151B形成一条跨越平面M的回路,第二对缆绳的第三驱动缆绳152A和第四驱动缆绳152B也形成一条跨越平面M的回路,才有可能通过实现通过软件控制驱动单元的运动而实现解耦。然而本发明图5A所示的实施例的末端执行器上的第一对缆绳的第一部分缆绳151Aa和第二部分缆绳151Ba 位于平面M的同侧,第二对缆绳的第三部分缆绳153Aa和第四部分缆绳153Ba 也位于平面M的同侧,因此现有的软件解耦方法是无法解耦本发明这种类型的末端执行器的。另外使用软件算法解耦的方法会导致手术机器人的控制程序复杂,容易出错,而且这种软件算法解耦的方法会使得手术器械的驱动机构的每个驱动单元失去独立性,具体而言,驱动装置内具有分别驱动三对缆绳的三个驱动单元,理想的状况各驱动单元的控制是彼此对立的,然而当使用软件算法解耦时,需要同时控制上述三个驱动单元一起运动,从而导致三个驱动单元失去了独立性,容易出现控制错误。
本发明提出了机械解耦的方案,在手术器械120的驱动装置170中设置一种机械解耦机构,从而避免上述软件算法解耦的弊端。
如图8A所示为本发明一实施例的驱动装置170的示意图,该驱动装置170 适用于驱动图5A所示的末端执行器。驱动装置170包括用于驱动末端执行器 150执行开合和/或偏航运动的第一驱动单元171和第二驱动单元172,用于驱动末端执行器150俯仰运动的第三驱动单元173,以及用于驱动长轴160自转运动的第四驱动单元174。第一对缆绳的第一驱动缆绳151A和第二驱动缆绳151B 分别以相反的缠绕方式绕在第一驱动单元171上,第二对缆绳的第三驱动缆绳 152A和第四驱动缆绳152B分别以相反的缠绕方式绕在第二驱动单元172上,第三对缆绳的第五驱动缆绳153A和第六驱动缆绳153B分别以相反的缠绕方式绕在第三驱动单元173上,第七驱动缆绳154A和第八驱动缆绳154B分别以相反的缠绕方式绕在第四驱动单元174上。
当器械安装架132内的致动器驱动轴171A旋转带动第一驱动单元171随其轴旋转时,第一驱动单元171收拉或释放第一驱动缆绳151A或第二驱动缆绳 151B以使第一夹持部230围绕其第三销313旋转,当器械安装架132内的致动器驱动第二驱动单元172随其轴172A旋转时,第二驱动单元172收拉或释放第二驱动缆绳152A或第三驱动缆绳152B以使第二夹持部240围绕第三销313旋转,第一夹持部230与第二夹持部240围绕第三销313运动使得末端执行器150 执行开合和/或偏航运动。当器械安装架132内的致动器驱动轴173A旋转带动第三驱动单元173旋转时,第三驱动单元173收拉或者释放第五驱动缆绳153A 或第六驱动缆绳153B时以使第二支架220围绕第二销312的轴线AA’旋转从而实现末端执行器150执行俯仰运动。当器械安装架132内的致动器驱动第四驱动单元174随其轴174A旋转时,第四驱动单元174收拉或释放第七驱动缆绳 154A或第八驱动缆绳154B实现驱动长轴160的自转运动。
驱动装置170还包括用于解除第三对缆绳与第一对缆绳、第二对缆绳之间在末端执行器150一侧的耦合关系的解耦机构,解耦机构包括主解耦件1761和从解耦件176,从解耦件176包括滑架1762和连接在滑架1762两端的第一导向部 1763、第二导向部1764,主解耦件1761通过第一解耦缆绳1767和第二解耦缆绳1768与滑架1762连接,主解耦件1761通过驱动第一解耦缆绳1767和第二解耦缆绳1768进而操纵从解耦件的运动。第一解耦缆绳1767和第二解耦缆绳 1768以相反方式绕在主解耦件1761上,主解耦件1761与第三驱动单元173以相同的角速度运动,主解耦件1761与第三驱动单元173可以设置在同一轴173A 上,因此主解耦件1761是与第三驱动单元173随轴173A同轴旋转,其他一些实施例中,主解耦件1761与第三驱动单元173也可以分别设置在不同的旋转轴上。主解耦件1761和第三驱动单元173具有不同的半径,主解耦件1761的半径为r2,第三驱动单元173的半径为R2,其中r2 如图8A,第一驱动缆绳151A和第二驱动缆绳151B先后通过第三导向轮 177A、第一导向部1763以及第三导向轮177C的导向后进入长轴内后一直延伸连接到末端执行器150。第三驱动缆绳152A和第四驱动缆绳152B先后通过第二导向轮177B、第二导向部1764以及第四导向轮177D的导向后进入长轴内后一直延伸连接到末端执行器150。第五驱动缆绳153A和第六驱动缆绳153B分别通过第五导向轮177E和六导向轮177F的导向后进入长轴内后一直延伸连接到末端执行器150,至于第一驱动缆绳151A至第六驱动缆绳153B如何于末端执行器150连接,前面已经详细描述过,这里不再赘述。 解耦过程如图8D所示,当第三驱动单元173随其轴173A沿逆时针(第一方向)旋转时,第三驱动单元173收拉第六驱动缆绳153B并同时释放第五驱动缆绳153A,使得末端执行器150的第二支架220如图7A和7B围绕第二销312 的轴线AA’旋转,整个末端执行器150执行俯仰运动。如上所述,此时第一驱动缆绳151A和第二驱动缆绳151B分别在第五滑轮215和第八滑轮218上的包角长度需要同时增加L,与此同时,第三驱动缆绳152A和第四驱动缆绳152B在第六滑轮216和第七滑轮217上的包角长度需要同时减少L才能使末端执行器 150顺利地执行俯仰运动。由于解耦机构的主解耦件1761与第三驱动单元173 同轴173旋转,因此在第三驱动单元173随轴173A逆时针旋转的同时,主解耦件1761也同样随轴173A逆时针旋转,此时主解耦件1761收拉第一解耦缆绳 1767并同时释放第二解耦缆绳1768,假如主解耦件1761转过的弧长为L/2,则从解耦件在第一解耦缆绳1767的拉动下沿A方向运动L/2距离,此时由于从解耦件的运动,使得第一驱动缆绳151A和第二驱动缆绳151B在驱动装置170内的长度将同时减少L,即第一对缆绳在驱动装置170内的长度减少2L,相应地,第三驱动缆绳152A和第四驱动缆绳152B在驱动装置170内的长度将同时增加 L,即第二对缆绳在驱动装置170内的长度增加2L。 由此第一驱动缆绳151A和第二驱动缆绳151B在驱动装置170内的长度减少量与第一驱动缆绳151A和第二驱动缆绳151B分别在第五滑轮215和第八滑轮 218上包角长度需要的增加量相等,第三驱动缆绳152A和第四驱动缆绳152B 在驱动装置170内的长度增加量与第三驱动缆绳152A和第四驱动缆绳152B在第六滑轮216和第七滑轮217上的包角长度需要的减少量相等。相反地,如图 8E所示,当第三驱动单元173和主解耦件1761一起顺时针(第二方向)旋转时,第一驱动缆绳151A和第二驱动缆绳151B在驱动装置170内的长度增加量与第一驱动缆绳151A和第二驱动缆绳151B分别在第五滑轮215和第八滑轮218上包角长度需要的减少量相等,第三驱动缆绳152A和第四驱动缆绳152B在驱动装置170内的长度减少量与第三驱动缆绳152A和第四驱动缆绳152B在第六滑轮216和第七滑轮217上的包角长度需要的增加量相等。由此第一对缆绳和第二缆绳在因末端执行器俯仰运动而引起的在末端执行器一侧上长度变化量全部由第一对缆绳和第二缆绳在驱动装置内的长度变化提供,因此第三对缆绳的运动将不再受第一对缆绳、第二对缆绳的限制,解耦机构实现了解除第三对缆绳与第一对缆绳、第二对缆绳之间的耦合关系。 为了使在解耦机构能精确可控地解除第一对缆绳与第二对缆绳、第三对缆绳之间的耦合关系,解耦机构的主解耦件1761驱动从解耦件176始终沿直线运动,并且使得从解耦件176运动引起的第一驱动缆绳151A、第二驱动缆绳151B、第三驱动缆绳152A以及第四缆绳152B的长度变化始终是线性的。如9A-9C所示,第一解耦缆绳1767通过第七导向轮1765重新定向后沿从解耦件176的运动方向固定到从解耦件176一端,同样地,第二解耦缆绳1768通过第八导向轮1766 重新定向后沿从解耦件176的运动方向固定到从解耦件176的另一端,因此主解耦件1761的运动将使得从解耦件176沿直线运动。并且第一解耦缆绳1767 在第七导向轮1765与从解耦件176之间的部分以及第二解耦缆绳1768在第八导向轮1766与从解耦件176之间的部分都与从解耦件176的运动方向平行,在解耦的过程中,第一解耦缆绳1767和第二解耦缆绳1768的长度改变速度与主解耦件1761的旋转线速度成正比例关系,因此,从解耦件176的运动速度与主解耦件1761和第三驱动单元173的旋转线速度也成正比例关系,从而使解耦过程精确可控。 如图8B-8C所示,第一导向轮177A、第一导向部1763以及第三导向轮177C 都是具有并排的两个滑轮的结构,两个滑轮分别用于引导第一驱动缆绳151A和第二驱动缆绳151B,第一驱动缆绳151A在第三导向轮177C和第一导向部1763 之间形成有第一解耦部分缆绳151Ac,在第一导向部1763和第一导向轮177A 之间形成有第三解耦部分缆绳151Ad,第二驱动缆绳151B在第三导向轮177C 和第一导向部1763之间形成有第二解耦部分缆绳151Bc,在第一导向部1763 和第一导向轮177A形成有第四解耦部分缆绳151Bd,同样的,第二导向部1764、第二导向轮177B以及第四导向轮177D也都是具有并排两个滑轮的结构,第三驱动缆绳152A和第四驱动缆绳152B分别在第四导向轮177D和第二导向部 1764之间具有第五解耦部分缆绳152Ac和第六解耦部分缆绳152Bc,在第二导向部1764和第三导向轮177B之间具有第七解耦部分缆绳152Ad和第八解耦部分缆绳(图8A中被第七解耦部分缆绳152Ad遮挡不可见),为使能更精确的解耦,需要在解耦过程中使第一解耦部分缆绳151Ac的长度变化量与第二解耦部分缆绳151Bc的长度变化量相等,因此第一解耦部分缆绳151Ac和第二解耦部分缆绳151Bc分别与经过第三导向轮177C中心处且垂直第三导向轮177C的轴线c1的平面形成大小相等的夹角θ,第五解耦部分缆绳152Ac和第七解耦部分缆绳152Bc与第七导向轮177D也具有相同的设置,这样可以使得在解耦过程中第一解耦部分缆绳151Ac和第二解耦部分缆绳151Bc的长度变化量相同,第五解耦部分缆绳152Ac和第七解耦部分缆绳152Bc的长度变化量相同。另外由于θ比较小使得第一解耦部分缆绳151Ac和第二解耦部分缆绳151Bc与第一导向轮 1764和第四导向轮177B的轴间距H1大致相等,在解耦过程中,第一解耦部分缆绳151Ac和第二解耦部分缆绳151Bc与从解耦件运动方向大致平行,从而使得由于第一解耦部分缆绳151Ac和第二解耦部分缆绳151Bc引起的解耦过程中第一解耦部分缆绳151Ac和第二解耦部分缆绳151Bc非线性变化较小,实现更精确的解耦。 如图8C所示,第三解耦部分缆绳151Ad、第四解耦部分缆绳151Bd、第七解耦部分缆绳152Ad以及第八解耦部分缆绳与从解耦件176运动方向平行,这样可以使得在解耦过程中由于从解耦件运动引起的第三解耦部分缆绳151Ad、第四解耦部分缆绳151Bd、第七解耦部分缆绳152Ad以及第八解耦部分缆绳的长度的变化的速度与从解耦件176运动的速度成正比例关系,故在解耦过程中,第一驱动缆绳151A至第四驱动缆绳152B中的任一条驱动缆绳在驱动装置170 内的长度变化速度与从解耦件176的移动速度成正比例关系,由上所述,从解耦件176的移动速度与主解耦件1761及第三驱动单元173的旋转线速度成正比例关系。故在解耦过程中,第一驱动缆绳151A至第四驱动缆绳152B中的任一条驱动缆绳在驱动装置170内的长度变化速度与主解耦件1761及第三驱动单元 173的旋转线速度也成正比例关系,从而通过主解耦件173及第三驱动单元173 精确控制第一对缆绳和第二对缆绳在末端执行器150上的长度变化量,实现精确可控地解耦。 如图8D所示为本实施例的解耦过程,相对于9A所示的状态,主解耦件1761 逆时针旋转L/2弧长,从解耦件176相应地沿A方向运动L/2距离,第一解耦部分缆绳151Ac、第三解耦部分缆绳151Ad、第二解耦部分缆绳151Bc以及第四解耦部分缆绳151Bd的长度同时减少L/2,从而第一驱动缆绳151A和第二驱动缆绳151B同时在驱动装置170内同时减少长度L,即第一对缆绳在驱动装置内长度减少2L。同样的,第五解耦部分缆绳152Ac、第六解耦部分缆绳152Ad、第七解耦部分缆绳152Bc以及第八解耦部分缆绳的长度同时增加L/2,从而第三驱动缆绳152A和第四驱动缆绳152B同时在驱动装置170内同时增加长度L,即第二对缆绳在驱动装置内的长度增加2L。 再次回到图7A,若本实施例中第二滑轮组的半径都为r1,第二支架220的俯仰轮319上用于容纳并引导第五驱动缆绳153A和第六驱动缆绳153B的环形槽319A的槽底半径为R1,当末端执行器150俯仰运动时,第五驱动缆绳153A 或第六驱动缆绳153B的能在该环形槽中形成包角。当末端执行器150从图5D 所示的零位状态旋转到图7A所示状态的过程中,若末端执行器150俯仰的角度为α时,第五驱动缆绳153A在俯仰轮319上的环形槽319A中的包角长度增加了L1,第六驱动缆绳153B在俯仰轮319上的环形槽319A中的包角长度同时减少了L1,其中L1=α*R1,由于末端执行器150的俯仰运动是由驱动装置170 内的第三驱动单元173驱动的,如图8D所示,此时假若第三驱动单元173为使末端执行器150俯仰运动的角度为α沿逆时针(第一方向)所转过的角度为β,第三驱动单元173释放第五驱动缆绳153A并同时收拉第六驱动缆绳153B,使得第五驱动缆绳153A绕在第三驱动单元173上的长度减少了L1,第六驱动缆绳153B绕在第三驱动单元173的长度增加了L1,其中L1=β*R2。由于主解耦件1761和第三驱动单元173同轴旋转,此时相应地,主解耦件1761释放第一解耦缆绳1767并同时收拉第二解耦缆绳1768,使得第一解耦缆绳1767绕在主解耦件1761上的长度减少了L/2,即第一解耦缆绳1767被释放了L/2,第二解耦缆绳1768绕在主解耦件1761上的长度增加了L/2,其中L/2=β*r2,从而滑架1762沿A方向移动了L/2距离,使第一驱动缆绳151A和第二驱动缆绳151B 在驱动装置170内长度都分别减少L,第三驱动缆绳152A和第四驱动缆绳152B 在驱动装置170内的长度都分别增加L,由前面所述可知,L=α*r1。综上所述,通过以上四个式子:L1=α*R1,L1=β*R2,L/2=β*r2,L=α*r1可以得到以下关系:
上述关系式表明第三驱动单元173的半径与主解耦件1761的半径之比为俯仰轮319的环形槽319A的槽底半径与第二滑轮组半径之比的2倍,引起该2倍的关系是因为从解耦件具有2个导向部,即第一导向部1763和第二导向部1764。在其他实施例中,从解耦件176的导向部个数也可以为其他数量,从而第三驱动单元的半径与主解耦件的半径之比和俯仰轮的半径与第二滑轮组半径之比的关系也与之发生变化,例如从解耦件可以具有N个导向部,第三驱动单元的半径与主解耦件的半径之比为俯仰轮的环形槽的槽底半径与第二滑轮组半径之比的N倍,即: 由此末端执行器150俯仰运动所需要第一对缆绳、第二对缆绳在末端执行器150一侧的长度变化量全部由解耦机构176引起第一对缆绳、第二对缆绳在驱动装置170内长度变化量准确提供,使得第三对缆绳的运动不再受第一对缆绳、第二对缆绳的限制,实现第三对缆绳和第一对缆绳、第二对缆绳之间的精确解耦。在整个解耦过程中可以始终维持第一部分缆绳151Aa、第二部分缆绳151Ba、第三部分缆绳152Aa以及第四部分缆绳153Ba的长度都是恒定不变的,整个第一对缆绳、第二对缆绳的张紧度也始终维持不变,而且由于整个解耦过程中,只有第三驱动单元173的轴173A运动,第一驱动单元171和第二驱动单元172 与第三驱动单元173完全独立。另外,由于主解耦件1761与引起耦合关系的耦合源即第三驱动单元173同轴旋转运动,从而主解耦件1761与耦合源第三驱动单元173同角速度运动,两者物理上完全同步运动,不要需要主操作设置给与信号控制解耦机构,解耦机构的运动与耦合源的运动同步运转,解耦机构同步第三驱动单元进行解耦,没有任何延迟,而且由耦合源第三驱动单元173引起的第一对缆绳和第二对缆绳在末端执行器150一侧的长度变化量,可以完全地、精确地映射到第一对缆绳和第二对缆绳在解耦机构176上的长度变化量,从而解耦机构176可以完全地、精确地解除掉第三对缆绳与第一对缆绳、第二对缆绳之间的耦合关系,所谓精确地解耦是指第三驱动单元旋转多少度,从解耦件则会移动多少距离,两者之间的关系是确定的,上述各半径比例等式已经给出。另外,由于从解耦件176始终是被主解耦件1761驱动而移动到相应位置,而不是由第一对缆绳或第二对缆绳带动的,整个解耦过程中第一对缆绳和第二对缆绳在从解耦件上基本上是不受力的,故第一对缆绳和第二对缆绳在解耦过程中的张力基本不变,增加了第一对缆绳和第二对缆绳的使用寿命与对末端执行器 150控制的精确度。 图9A和9B示出了本发明的另一实施例的驱动装置270,驱动装置270B包括第一驱动单元271、第二驱动单元272、第三驱动单元273、第三驱动单元274 以及解耦机构276,第一驱动单元271随其轴271A旋转时,第一驱动单元271 收拉或释放第一驱动缆绳151A或第二驱动缆绳151B以使第一夹持部230围绕第三销313旋转,当器械安装架132内的致动器驱动第二驱动单元272随其轴 272A旋转时,第二驱动单元272收拉或释放第二驱动缆绳152A或第三驱动缆绳152B以使第二夹持部240围绕第三销313旋转,第一夹持部230与第二夹持部240围绕第三销313运动使得末端执行器150执行开合和/或偏航运动。当器械安装架132内的致动器驱动第三驱动单元273随其轴273A旋转时,第三驱动单元173收拉或者释放第五驱动缆绳153A或第六驱动缆绳153B时以使第二支架220围绕第二销的轴线AA’旋转从而实现末端执行器150执行俯仰运动。 解耦机构276包括主解耦件2761和从解耦件,主解耦件2761为与第三驱动单元273同轴旋转的齿轮,从解耦件包括齿条2762和连接在齿条2762两端的第一导向部2763和导向部第二导向部2764,第一驱动缆绳151A和第二驱动缆绳151B通过从解耦件的第一导向部2763后进入长轴160内,第二驱动缆绳152A 和第二驱动缆绳152B通过从解耦件的第二导向部2764后进入长轴160内。 如图9B所示,当第三驱动单元273和主解耦件273一起随轴273A逆时针旋转时,第三驱动单元273收拉第六驱动缆绳153B同时释放第五驱动缆绳153A,末端执行器150如图7A、7B所示执行俯仰运动,与此同时,如果主解耦件2761 逆时针转过的弧长为L/2,从解耦件在主解耦件2761驱动下沿A方向运动的长度也为L/2,第一驱动缆绳151A和第二驱动缆绳151B在第一导向部2763和第一导向轮277A之间的长度、以及在第一导向部2763和第三导向轮277C之间的长度都同时减少L/2,第三驱动缆绳152A和第四驱动缆绳152B在第二导向部2764和第二导向轮277B之间的长度、以及在第二导向部2764和第四导向轮 277D之间的长度同时增加L/2,从而第一驱动缆绳151A和第二驱动缆绳151B 在驱动装置270内的长度整体减少L,第三驱动缆绳152A和第四驱动缆绳152B 在驱动装置270内的长度整体增加L。由此驱动装置270内的解耦机构276提供了末端执行器150俯仰运动所需要的第一驱动缆绳151A至第四驱动缆绳152B 在末端执行器150一侧的长度的变化量,从而解除了第三对缆绳与第一对缆绳、第二对缆绳之间的耦合关系,第三对缆绳的运动不再受第一对缆绳和/或第二对缆绳的限制。 图10A、10B示出了本发明的另一实施例的驱动装置370,驱动装置270B包括第一驱动单元371、第二驱动单元372、第三驱动单元373、第四驱动单元374 以及解耦机构376,除解耦机构376结构与两个实施例不同以外,其他部件与上述两个实施例基本相同,这里不再赘述。解耦机构376包括与第三驱动单元373 同轴旋转的主解耦件3761,与主解耦件3761固定连接或一体成型的解耦凸轮 3762,解耦凸轮3762两端分别连接由第一导向部3763和第二导向部3764。 如图10B所示,当主解耦件3761与第三驱动单元373一起随轴373A逆时针旋转时,第三驱动单元373收拉第六驱动缆绳153B并同时释放第五驱动缆绳 153A,末端执行器150如图7A-7C所示执行俯仰运动,与此同时,解耦凸轮3762 在主解耦件3761的驱驶下也随轴373A逆时针旋转,从而使得第一驱动缆绳 151A和第二驱动缆绳151B在第一导向轮377A和第三导向轮377C之间的长度减少了L,同时第三驱动缆绳152A和第四驱动缆绳152B在第二导向轮377B 和第四导向轮377D之间的长度增加了L,因此驱动装置370内的解耦机构376可以提供末端执行器150因俯仰运动所需要的第一驱动缆绳151A至第四驱动缆绳152B在末端执行器150一侧的长度变化量,从而解除了第三对缆绳与第一对缆绳、第二对缆绳之间的耦合关系,第三对缆绳的运动不再受第一对缆绳和/或第二对缆绳的限制。 图11A-11E是本发明的一实施例的驱动装置570,驱动装置570上设置有第一驱动装置570包括本体578,和设置在本体778上的第一驱动单元571、第二驱动单元572、第三驱动单元573以及第四驱动单元774,第一驱动缆绳151A 和第二驱动缆绳151B的近端以相反方式缠绕在第一驱动单元571,第三驱动缆绳152A和第四驱动缆绳152B的近端以相反方式缠绕在第二驱动单元572,第五驱动缆绳153A和第六驱动缆绳153B的近端以相反方式缠绕在第三驱动单元 573。 为更好的展示主解耦件5761与从解耦件5762之间的关系,图11B未显示出第三驱动单元,如图11B所示,驱动装置570还包括安装座577和设置在安装座577上的解耦机构,解耦机构包括主解耦件5761和从解耦件5762,主解耦件 5761和第三驱动单元5762设置在同一旋转轴573A,主解耦件5761为与第三驱动单元5762同角速度旋转的凸轮,从解耦件5762包括滑架5765和安装在滑架 5765上的第一导向部5763和第二导向部5764,和上一实施例类似地,驱动装置570还包括设置安装座577上的第一导向轮576A、第二导向轮576B、第三导向轮576C以及第四导向轮576D。第一导向轮576A的旋转轴线与第一导向部 5763的旋转轴线平行,第四导向轮576D的旋转轴线与第一导向轮576A的旋转轴线、第一导向部5763的旋转轴线垂直。第二导向轮576B的旋转轴线与第二导向部5764的旋转轴线平行,第三导向轮576C的旋转轴线与第二导向轮576B 的旋转轴线、第二导向部5764的旋转轴线垂直。第一驱动缆绳151A和第二驱动缆绳151B经过第一导向轮576A重新定向后再经过从解耦件5762的第一导向部5763的导向后通过第三导向576C导向后离开驱动装置570进入长轴160内,第三驱动缆绳152A和第四驱动缆绳152B经过第一导向轮576A重新定向后经过从解耦件5762后再经过第三导向576C导向后离开驱动装置570进入长轴160 内,第五驱动缆绳153A和第六驱动缆绳153B经过第五导向轮576E重定向后进入长轴160内。 如图11C所示,安装座577包括第一凸台5771和第二凸台5772,安装座577 通过第一凸台5771安装到主体578上,第一导向轮576A、第二导向轮576B、第三导向轮576C、第四导向轮576D以及第五导向轮576E都安装第二凸台5772 上。从解耦件5762包括滑架5765和安装在滑架5765上的第一导向部5763和第二解耦5764,第一导向部5763用于将第一驱动缆绳151A、第二驱动缆绳151B 与从解耦件5762相连接,第二导向部5764用于将第三驱动缆绳152A、第四驱动缆绳152B与从解耦件5762相连接。滑架5765包括5766和第二开口5767,第一开口5766用于容纳主解耦件5761,第二开口5767用于容纳安装座577的第二凸台5771,第二凸台5771的侧壁与第二开口5767的侧壁配合限制滑架5765 垂直滑动方向的移动。 再回到图11B,滑架5765往第一开口5766内延伸有第一凸体5768和第二凸体5769,主解耦件5761在第一开口5766内与第一凸体5768、第二凸体5769 相抵接,第一凸体5768、第二凸体5769能在主解耦件5761旋转时在主解耦件5761的外轮廓上移动,使得滑架5765在安装座577上滑动。如图11D所示,主解耦件5761包括固定在旋转轴573A上的第一凸轮5761A和第二凸轮5761B,第一凸轮5761A和第二凸轮5761B均半心形凸轮,第二凸轮5761B和第一凸轮 4761在垂直轴573A的平面上具有相同的外轮廓,第一凸轮5761A在垂直轴573A 的平面上的外轮廓包括心形渐开线S1和位于渐开线S1两端的第一圆弧S2以及第二圆弧S3,第一圆弧S2与第二圆弧S3的半径不同,渐开线S1到旋转轴473A 的轴心的距离具有从第一圆弧S2开始往第二圆弧S3方向逐渐增加,而且渐开线S1具有如下曲线:即渐开线S1到旋转轴473A的轴线的距离的变化量P与第一凸轮5761A随轴473A旋转的角度θ1之间是线性关系,P=K1*θ1+K2,其中 K1和K2为常数,这样使得当主解耦件5761均速转动时,第一凸体5768与第一凸轮5761的渐开线S1的接触点到旋转轴573A的距离及第二凸体5768与第二凸轮的渐开线S1’的接触点到旋转轴573A的距离也匀速线性变化凸体。第一凸轮5761A和第二凸轮5761B一起形成心形的凸轮式主解耦件5761,第一凸轮 5761A和第二凸轮5761B在凸轮的轴向上上下错开,第一凸轮5761A与滑架5761 的第一凸体5768配合运动,第二凸轮5761B与滑架5761的第二凸体5768配合运动,以实现主解耦件5761驱动从解耦件5762的运动从而解除第一对缆绳与第二对缆绳、第三对缆绳之间的耦合关系。 驱动装置570的解耦过程如图11E所示,第三驱动单元473(图11E未显示) 从图11B的零位位置被致动器驱动逆时针(第一方向)旋转至图11E的极限位置的过程中,第三驱动单元473收拉第六驱动缆绳153B并同时释放第五驱动缆绳 153A,此时末端执行器150如图7A、7B所示的俯仰运动。由于主解耦件4761 与第三驱动单元473设置在同一旋转轴473A上,因此主解耦件4761也逆时针运动,主解耦件4761的第一凸轮4761A逆时针旋转使得第一凸体5768在第一凸轮4761A的渐开线S1上沿渐开线S1上到旋转轴473A的距离增大的方向移动,与之相反地,主解耦件4761的第二凸轮4761B逆时针旋转使得第一凸体5768 在第二凸轮4761B的渐开线S1上沿渐开线S1上到旋转轴473A的距离减少的方向移动,由于滑架5765的第二开口5767的内壁与安装座577配合限制滑架 5765沿垂直A方向的方向移动,因此,滑架5765被主解耦件4761驱动沿A方向直线运动。 滑架5765上还具有连接第一对缆绳的第一导向部5763,连接第二对缆绳的第二导向部5764,为了使滑架5765在运动引起的第一对缆绳和第二对缆绳在驱动装置内的长度变化是线性的,和图8B、图8C所示的实施例类似地,滑架5765 的运动方向与第一对缆绳在第一导向轮576A和第一导向部5763之间的部分平行,滑架5765的运动方向与第二对缆绳在第二导向轮576B和第二导向部5764 之间的部分平行。第一驱动缆绳151A和第二驱动缆绳151B在第一导向部5763 和第四导向轮576D之间的部分缆绳与沿A方向的直线的夹角相等,同样地,第三驱动缆绳152A和第四驱动缆绳152B在第二导向部5764和第三导向轮 576C之间的部分缆绳与沿A方向的直线的夹角相等,若在图11E位置时滑架 5765在主解耦件5761的驱动下沿A方向移动了L/2的距离,则第一驱动缆绳 151A和第二驱动缆绳151B在第一导向轮576A与第一导向部5763之间的长度减少上述了L/2,在第一导向部5763与第四导向轮576D之间的长度也减少上述了L/2,从而第一驱动缆绳151A和第二驱动缆绳151B在驱动装置570内的长度减少了L,即第一对缆绳在驱动装置570内的长度减少了2L。第三驱动缆绳152A和第四驱动缆绳152B在第二导向轮576B和第二导向部5764之间的长度增加了L/2,在第二导向部5764与第三导向轮576C之间的长度也增加了L/2,从而第三驱动缆绳152A和第四驱动缆绳152B在驱动装置570内的长度增加了L,即第二对缆绳在驱动装置570内的长度增加了2L。由此驱动装置570内的解耦机构提供了末端执行器150俯仰运动所需要的第一驱动缆绳151A、第二驱动缆绳151B、第三驱动缆绳152A以及四驱动缆绳152B在末端执行器150一侧的长度的变化量,从而解除了第三对缆绳和第一对缆绳、第二对缆绳的耦合关系,第三对缆绳的运动不再受第一驱动缆绳、第二驱动缆绳的限制,使得末端执行器150能顺利的执行俯仰操作。 若主解耦件5761继续旋转使得滑架5765移动到极限位置,此时第一凸体 5798离开第一凸轮5761A的渐开线S1进入第二圆弧S3,第二凸体5769离开第二凸轮5761B的渐开线S1’进入第一圆弧S2’,而由于第一凸体5798在第一凸轮5761A的第一圆弧S1和第二圆弧S2上移动时第一凸体5798与第一凸轮 5761A的接触点到旋转轴573A的距离不再改变,同样地,第二凸体5798在第二凸轮5761B的第一圆弧S1’和第二圆弧S2’上移动时第一凸体5798的与第一凸轮5761A的接触点到旋转轴573A的距离不再改变,因此滑架5765沿A方向不再移动,滑架5765此时处于沿A方向运动的极限位置,因此由于主解耦件 5761的存在第一圆弧S1、S1’和第二圆弧S2、S2’使得主解耦件5761旋转到极限位置是仍继续旋转而使滑架继续运动。相反的,当主解耦件5761顺时针旋转时,第一凸轮5761A、第二凸轮5761B以及滑架的运动与主解耦件5761逆时针运动相反,这里不再赘述。 以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 手术器械与驱动装置的接合方法、从操作设备及手术机器人
- 手术器械、手术装置、从操作设备及手术机器人