集成Tango设备服务的嵌入式运动控制器
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及运动控制系统的集成管理。更具体地说,本发明涉及一种用在大规模现场设备(如电机)的控制、管理中的集成Tango设备服务的嵌入式运动控制器。
背景技术
基于PC的运动控制器越来越多的应用在运动控制系统中,一方面带来成本的降低,另一方由于自带操作系统,可以部署软件服务程序,更利于自动化技术和IT技术的融合。在基于PC的运动控制器中,通讯服务程序(OPC-UA服务程序以及大科学装置常用的Tango服务程序)可以驻留在现场控制器中,与现场控制程序一起调试、部署,对外提供统一服务调用接口,提高控制系统的现场部署、调试时间。
传统的运动控制器,由于本身软硬件的限制,只能提供通讯协议级别的访问接口,远程通讯服务程序和控制应用程序驻留在远程控制计算机上,现场控制对象进行在线调试、升级调试时,需要占用大量的现场调试时间,影响系统的整体调试部署效率。
发明内容
本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
为了实现根据本发明的这些目的和其它优点,提供了一种集成Tango设备服务的嵌入式运动控制器,基于PC的运动控制器,其上嵌入部署有PLC控制程序、OPC-UA服务以及Tango设备服务;
其中,所述运动控制器上的Tango设备服务通过Tango软件总线与远程控制计算机的控制应用服务程序建立通信链路,以进行数据交换。
优选的是,所述Tango设备服务通过OPC-UA服务访问运动控制器中的数据信息,OPC-UA服务通过远程ADS通讯协议与PLC控制程序进行数据通信。
优选的是,还包括对运动控制器的软/硬件运行环境进行确定,以及对PLC软件电机对象OPC-UA服务接口、设备服务软件电机接口进行配置。
优选的是,所述PLC软件电机对象OPC-UA服务接口配置包括对PLC程序中对接口变量的定义,以及对OPC-UA通讯属性的声明。
优选的是,所述PLC软件以单电机为基本对象,单电机控制功能块FB_AxisXXX数据接口包括命令数据Cmd、状态数据State;
其中,内部控制子程序循环执行,循环读取命令数据Cmd,以输出状态数据State且控制命令数据Cmd的所有Boolean控制命令采用上升沿触发模式。
优选的是,在设备服务软件电机接口配置中,电机设备服务程序通过OPC-UA服务程序读取PLC软件电机对象的接口变量标签,基于Tango软件框架实现电机设备服务;
其中,电机对象设备服务接口包括Device Properties、Commands和Attributes三类;
PLC软件电机对象的Cmd接口的控制命令标签、命令参数标签与电机设备服务的Commands和Attributes接口对应;
PLC软件电机对象的State接口数据标签与电机设备服务的Attributes接口对应。
优选的是,所述Device Properties接口包含电机所在控制器地址及控制器中电机位置信息,以通过Device Properties接口确定电机所在控制器及控制器中电机的单元号和轴号;
其中,DeviceAddress为电机所在控制器的IP和端口号,OPC-UA软件服务默认使用的端口号为4840。
本发明至少包括以下有益效果:本发明的适用于Tango软件框架的嵌入式运动控制器,在嵌入式控制器内部设计部署电机对象的设备服务化,实现电机对象控制程序、设备服务程序的一体化设计、调试、部署,减少现场调试时间,提高控制系统的调试、部署效率。
本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
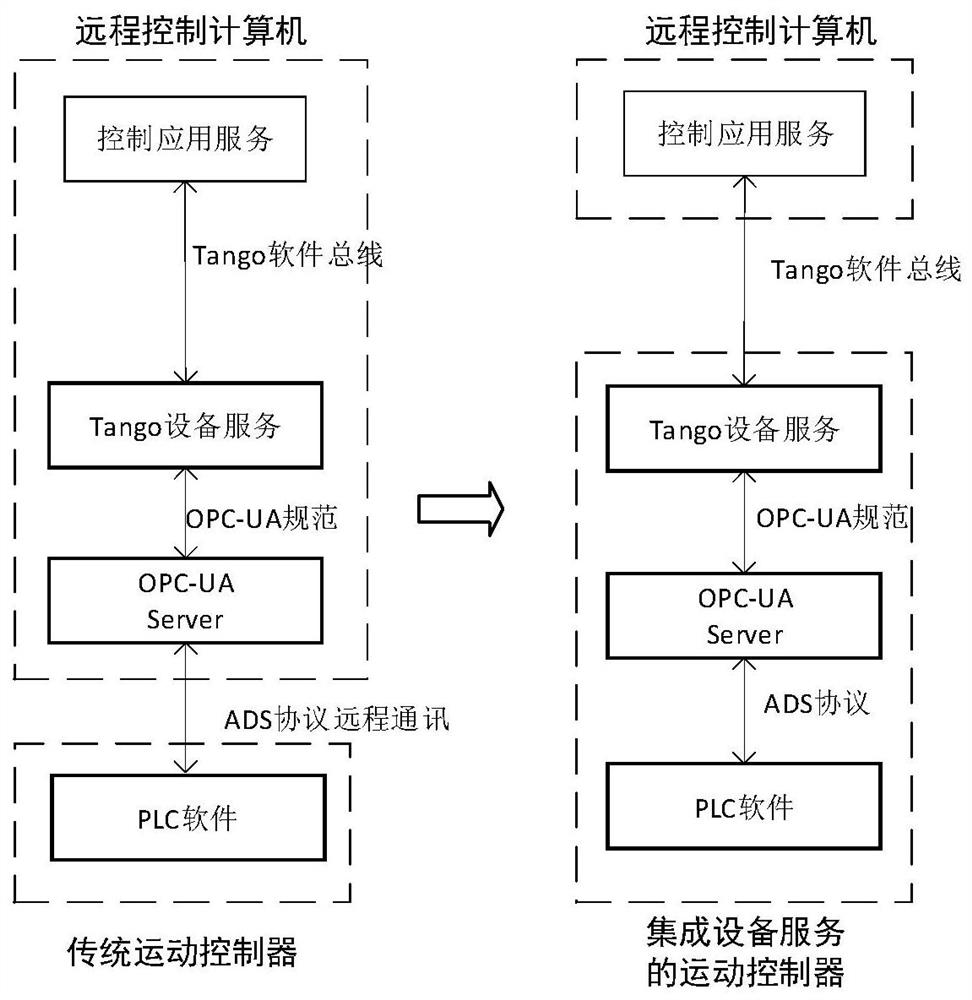
图1为集成OPC-UA服务及Tango设备服务的运动控制器的对比示意图;
图2为本发明的单电机控制功能块示意图;
图3为本发明的电机设备服务的Commands和Attributes接口配置示意图。
具体实施方式
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
传统的运动控制系统中,远程控制计算机上会部署OPC-UA服务、Tango设备服务及控制应用服务。控制应用服务与Tango设备服务之间通过Tango软件总线进行数据交互,Tango设备服务通过OPC-UA服务访问现场运动控制器数据,OPC-UA服务与运动控制器之间采用ADS通讯协议。工程应用中,远程控制计算机在部署和配置OPC-UA服务和Tango设备服务后,需要到现场进行PLC(programmable logic controller)控制程序的通讯设置、通讯测试,接口测试,现场调试工作量非常大。
将OPC-UA服务以及Tango设备服务部署在运动控制器后,其布局对比如图1所示,运动控制器硬件在出厂测试时完成PLC控制程序、OPC-UA服务、Tango设备服务程序的调试,现场只需要测试控制应用服务程序即可,控制应用服务程序采用Tango软件总线技术的采用,调试和测试相对简单。具体来说本发明通过在控制器中部署OPC-UA服务以及Tango设备服务,Tango设备服务通过OPC-UA服务访问现场运动控制器数据,OPC-UA服务与运动控制器之间采用远程ADS通讯协议,出厂测试中完成PLC控制程序和OPC-UA服务、Tango设备服务程序的调试,现场只需要测试基于Tango软件总线的控制应用服务程序。
集成OPC-UA服务和Tango设备服务的运动控制器,在设计实现中需要确定控制器软硬件运行环境,完成PLC软件接口设计、设备服务接口设计。
1、运动控制器软硬运行环境
当运动控制器部署OPC-UA服务和Tango设备服务时,需要相应的软硬件运行环境支持。运动控制器在运行PLC程序外需要提供额外硬件资源运行这些服务软件,并且保留一定的性能裕度。基于PC的运动控制器的最低硬件配置如下表1所示。
表1
运动控制器软件运行环境如表2所示,包括C/C++运行环境、MySQL数据库以及ZeroMQ通讯中间件,软件运行版本不低于以下配置。
表2
2、PLC软件电机对象OPC-UA服务接口
运动控制器PLC软件实现电机对象的监控操作、状态诊断,部署在运动控制器内。运动控制对象接口设计参考IEC61131 PLC Open Motion Control Specifications中对运动控制对象的功能接口定义。
PLC软件的电机对象通过ADS(Auotomation Device Specification)通讯实现与OPC-UA服务的通讯服务程序的通讯,OPC-UA服务程序已经工具化,只需要在电机程序中对OPC-UA接口进行定义,OPC-UA服务工具软件读取PLC控制程序的变量定义表,在OPC-UA服务程序启动后通过ADS通讯协议自动读取加载的通讯变量表。
因此PLC软件电机对象的OPC-UA接口定义只需在PLC程序中对接口变量进行定义,并且对其OPC-UA通讯属性进行声明。
2.1PLC软件电机对象接口设计
PLC软件以单电机为基本对象,单电机控制功能块FB_AxisXXX(XXX代表电机号)设计如图2所示。
单电机控制功能块FB_AxisXXX数据接口包括命令数据Cmd、状态数据State。内部控制子程序AxisNo_Power、AxisNo_MoveRelative等循环执行,循环读取命令数据Cmd,输出状态数据State。控制命令Cmd的所有的Boolean控制命令采用上升沿触发模式,数据标签定义如下表3所示。
表3
设备状态State的数据标签(接口)定义如表4所示:
表4
2.2PLC软件电机对象接口的OPC-UA接口声明
PLC软件的接口变量在进行OPC-UA通讯变量声明时,在变量定义语句前,加入{}定义的变量声明语句,如下:
{attribute'OPC.UA.DA':='1'}
{attribute'OPC.UA.DA.StructuredType':='1'}
{attribute'OPC.UA.DA.Access':='3'}
AxisComd AxisComd1 AxisComd;//电机命令接口变量定义
{attribute'OPC.UA.DA':='1'}
{attribute'OPC.UA.DA.StructuredType':='1'}
{attribute'OPC.UA.DA.Access':='1'}
AxisState AT AxisState AxisState;//电机状态接口变量定义
OPC-UA通讯变量声明中的配置参数及其含义,如表5所示:
表5
3、设备服务软件电机对象接口设计
电机设备服务程序通过OPC-UA服务程序读取PLC软件电机对象的接口变量标签,基于Tango软件框架实现电机设备服务。电机对象设备服务接口包括Device Properties、Commands和Attributes三类。
PLC软件电机对象的Cmd接口的控制命令标签、命令参数标签与电机设备服务的Commands和Attributes接口对应。
PLC软件电机对象的State接口数据标签与电机设备服务的Attributes接口对应。
电机设备服务的Commands和Attributes接口设计如下图所示。使用TANGO中间件的设备服务设计工具POGO设计类接口,具体的电机设备服务的Commands和Attributes接口如图2所示。
3.1Device Properties
Device Properties接口包含电机所在控制器地址及控制器中电机位置信息。Device Properties接口定义如表6所示。
表6
通过Device Properties接口确定电机所在控制器及控制器中电机的单元号和轴号。DeviceAddress为电机所在控制器的IP和端口号,OPC-UA软件服务默认使用的端口号为4840。
3.2Commands
Commands接口包含各种控制命令,接口描述如表7所示:
表7
3.3Attributes
Attributes接口包含各种属性,接口描述如表8所示:
表8
综上,本发明是随着基于PC的运动控制器的大量使用,在PC的运动控制器上设计实现了电机对象的OPC-UA服务和Tango设备服务的集成,使得OPC-UA服务程序以及大科学装置常用的Tango服务程序均可以驻留在现场控制器中,使远程通讯变成了本地通讯,降低了设备通讯程序参数设置、通讯调试的难度;远程调试变成了本地调试,且大部分的调试工作可以在出厂调试时完成,减少了线程调试人员的工作负担;通讯服务程序基于Tango软件总线规范,可以屏蔽底层硬件设备的通讯协议的差异性,在不同厂家的硬件控制上只要驻留的相同的通讯服务程序,就能实现现场控制器的互换。由于通讯服务程序运行在控制器的操作系统之上的,可以方便的对通讯服务程序进行版本升级,支持最新的通讯服务接口。另外远程控制程序只与运动控制器设备服务进行数据交换,不需要进行OPC-UA服务及Tango设备服务的相关配置,提高了运动控制系统的集成、调试和部署效率。
以上方案只是一种较佳实例的说明,但并不局限于此。在实施本发明时,可以根据使用者需求进行适当的替换和/或修改。
这里说明的设备数量和处理规模是用来简化本发明的说明的。对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
- 集成Tango设备服务的嵌入式运动控制器
- 一种嵌入式报警服务集成设备及报警方法