一种适用于多种尺度的舰船目标定位检测方法与系统
文献发布时间:2023-06-19 09:54:18
技术领域
本发明属于神经网络图像处理技术领域,特别涉及一种适用于多种尺度的舰船目标定位检测方法与系统。
背景技术
随着雷达技术、卫星技术、模式识别技术的迅速发展以及各类传感器的全球布控,舰船目标识别的技术手段逐渐增多,舰船识别技术呈现出多样化的发展趋势。
近景舰船目标智能检测与识别系统在民用和军事侦察中有着广阔的应用前景,如无人机海上敌情侦察、为海面巡航导弹提供导引、海上救援等。由于海天条件的复杂性,舰船目标的定位与识别具有相当大的难度。
其中,基于成像技术的舰船识别是对传感器传回的目标舰船图像进行分析,根据图像的特征对目标舰船的属性、种类或者型号进行识别。随着各类成像技术的发展,基于成像技术的舰船目标识别也日趋成熟,不仅可以判断目标的方位,还能够较为准确地确定目标的详细类别,成为了舰船目标识别的主流方法。
但是传统的成像技术在对舰船检测的过程中,因舰船的尺寸大小不一,差别较大,容易造成检测效率低下且精准度降低。
因此,如何解决在舰船检测过程中因目标尺度差异较大而造成的检测效率较差的问题,同行从业人员亟待解决。
发明内容
本发明的主要目的在于提供一种至少部分解决上述技术问题的适用于多种尺度的舰船目标定位检测方法与系统,可解决上述技术问题。
为实现上述目的,本发明采取的技术方案为:
第一方面,本发明实施例提供一种适用于多种尺度的舰船目标定位检测方法,包括:
通过遥感传感器获取目标区域的遥感图像;
将所述遥感图像输入多尺度卷积块改进的残差网络模型,输出舰船目标定位的检测结果;所述多尺度卷积块改进的残差网络模型包括:数据输入处理块、多尺度特征提取块、多尺度特征融合块和全连接层。
进一步地,通过遥感传感器获取目标区域的遥感图像,包括:
通过遥感传感器获取目标区域的遥感图像,并对所述遥感图像进行预处理;所述预处理包括:辐射定标、大气校正、几何校正和图像融合。
进一步地,所述数据输入处理块中包括BN层,卷积核为7*7的卷积层,ReLU层和最大池化层;
所述多尺度特征提取块包括:第一尺度特征提取块,第二尺度特征提取块,第三尺度特征提取块和第四尺度特征提取块;所述数据输入处理块的输出端与第一尺度特征提取块的输入端相连结;
所述第一尺度特征提取块包括三个第一残差单元;所述第一残差单元包括三个卷积核为1*1的卷积层、一个从残差块输入端到输出端的级联;
所述第二尺度特征提取块包括四个第二残差单元;所述第二残差单元包括三个卷积核为3*3的卷积层、一个从残差块输入端到输出端的级联;
所述第三尺度特征提取块包括四个第三残差单元;所述第三残差单元包括三个卷积核为5*5的卷积层、一个从残差块输入端到输出端的级联;
所述第四尺度特征提取块包括三个第四残差单元;所述第四残差单元包括三个卷积核为7*7的卷积块、一个从残差块输入端到输出端的级联;
所述多尺度特征融合块包括第一部分多尺度特征联合部分和第二部分多尺度特征块结合部分;
所述多尺度特征联合部分,包括第一特征块、第二特征块、第三特征块和第四特征块分别为其对应多尺度特征提取块的特征输出;
第一特征块、第二特征块、第三特征块和第四特征块经过双线性插值将特征维度统一;
所述多尺度特征块结合部分,包括:第一结合特征块,第二结合特征块,第三结合特征块,第四结合特征块,分别为其对应的第一特征块、第二特征块、第三特征块和第四特征块,通过结合函数α(·)结合后的结果;
所述全连接层,使用损失函数指导。
进一步地,将所述遥感图像输入多尺度卷积块改进的残差网络模型,输出舰船目标定位的检测结果;包括:
将经预处理后的遥感图像作为输入数据集,通过数据输入处理块进行二次处理;
二次处理后的数据输入至多尺度特征提取块进行特征提取;依次通过四个尺度特征提取块进行特征提取,得F
分别对每一个尺度特征提取块输出特征进行双线性插值,使其形成保持在统一维度的四个特征,分别记为F′
统一维度后的特征拼接后,经过一层1*1的卷积层进行特征融合,得到F
多尺度融合特征块F
将四个结合特征块F′
进一步地,所述全连接层的损失函数为
第二方面,本发明实施例还提供一种适用于多种尺度的舰船目标定位检测系统,包括:
获取模块,通过遥感传感器获取目标区域的遥感图像;
检测模块,将所述遥感图像输入多尺度卷积块改进的残差网络模型,输出舰船目标定位的检测结果;所述多尺度卷积块改进的残差网络模型包括:数据输入处理块、多尺度特征提取块、多尺度特征融合块和全连接层。
与现有技术相比,本发明具有如下有益效果:
本发明提供的一种适用于多种尺度的舰船目标定位检测方法,包括:通过遥感传感器获取目标区域的遥感图像;将所述遥感图像输入多尺度卷积块改进的残差网络模型,输出舰船目标定位的检测结果。该方法使用多尺度卷积层改进的残差网络,通过对每一尺度模块得到的特征图进行融合,得到可以提取多尺度特征的主干网络,通过自定义损失函数指导的全连接层进行最终目标的检测。解决了在舰船检测过程中因目标尺度差异较大而造成的检测效率较差的问题,该方法能够得到相对精准的检测结果,适用于军用及民用的舰船检测作业。
附图说明
图1为本发明实施例提供的适用于多种尺度的舰船目标定位检测方法流程图;
图2为本发明实施例提供多尺度卷积块改进的残差网络模型结构图;
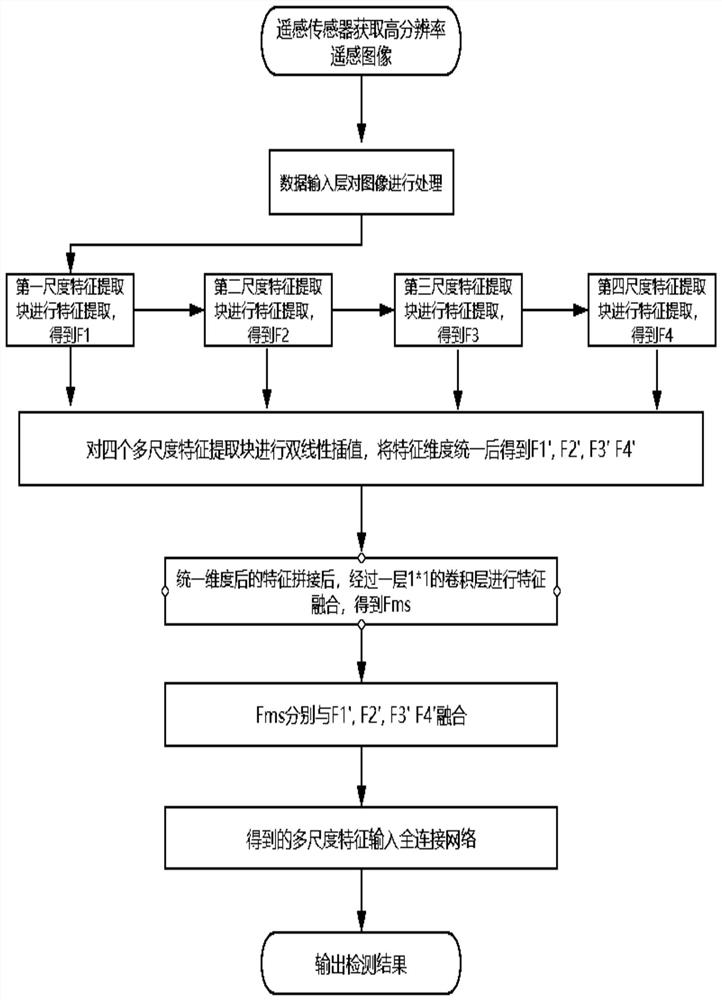
图3为本发明实施例提供的具体实施例的检测方法原理图;
图4a为本发明实施例提供的小尺寸目标检测结果示意图;
图4b为本发明实施例提供的大尺寸目标检测结果示意图;
图5为本发明实施例提供的适用于多种尺度的舰船目标定位检测系统结构框图。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
本发明提供了一种适用于多种尺度的舰船目标定位检测方法,参照图1所示,该方法包括:
S10、通过遥感传感器获取目标区域的遥感图像;
S20、将所述遥感图像输入多尺度卷积块改进的残差网络模型,输出舰船目标定位的检测结果;所述多尺度卷积块改进的残差网络模型包括:数据输入处理块、多尺度特征提取块、多尺度特征融合块和全连接层。
其中,步骤S10中对获取遥感图像的方式不作限定,可是航空像片和卫星相片。比如可通过无人机搭载成像设备获取目标区域的遥感图像。获取的遥感图像需要进行预处理,该遥感图像的预处理主要包括辐射定标、大气校正、正射校正、图像配准和图像融合。
(1)辐射定标
比如卫星传感器获取的原始数据记录的是地物的灰度值,是一个无量纲的整数值,值的大小受卫星传感器、地物和大气等各种因素的影响。使用遥感影像进行各种生产应用的第一步首先要进行辐射定标,即将原始图像的灰度值转换为表观反射率。
(2)大气校正
辐射定标之后的表观反射率只是消除了传感器本身的误差,仍然不是真实的地表反射率。大气校正将表观反射率消除了大气的散射、吸收和反射引起的误差,得到地表反射率,地表反射率才是真实的地物的反射率。
(3)几何校正
本发明实施例中通过一系列的数学模型来改正和消除遥感影像成像时因摄影材料变形、物镜畸变、大气折光、地球曲率、地球自转、地形起伏等因素导致的原始图像上各地物的几何位置、形状、尺寸、方位等特征与在参照系统中的表达要求不一致时产生的变形。
(4)图像融合
遥感图像融合是将多源遥感数据在统一的地理坐标系中采用一定算法生成一组新的信息或合成图像的过程。遥感图像融合将多种遥感平台、多时相遥感数据之问以及遥感数据与非遥感数据之间的信息进行组合匹配、信息补充,融合后的数据更有利于综合分析。本实施例中为了充分的利用多光谱和全色图像的不同特征,有必要选择合适的融合算法将多光谱和全色图像进行融合。基于传统融合方法(PCA、IHS、GS)的对比,GS融合方法能够更好的保留原始光谱特征,因此为提高遥感影像的分辨率,利用GS融合方法将多光谱数据和全色影像融合为更高分辨率的数据。
步骤S20中使用多尺度卷积块改进的残差网络模型,参照图2所示,包括:数据输入处理块,多尺度特征提取块,多尺度特征融合块和全连接层。
1.数据输入处理块中包括BN层,卷积核为7*7的卷积层,ReLU层和最大池化层。
2.多尺度特征提取块包括第一尺度特征提取块,第二尺度特征提取块,第三尺度特征提取块,第四尺度特征提取块。上述数据输入处理块的输出端与第一尺度特征提取块的输入端相连结。
2.1).第一尺度特征提取块包括三个第一残差单元;第一残差单元包括三个卷积核为1*1的卷积层,和一个从残差块输入端到输出端的级联。
2.2).第二尺度特征提取块包括四个第二残差单元;第二残差单元包括三个卷积核为3*3的卷积层,和一个从残差块输入端到输出端的级联。
2.3).第三尺度特征提取块包括四个第三残差单元;第三残差单元包括三个卷积核为5*5的卷积层,和一个从残差块输入端到输出端的级联。
2.4).第四尺度特征提取块包括三个第四残差单元;第四残差单元包括三个卷积核为7*7的卷积块,和一个从残差块输入端到输出端的级联。
3.上述多尺度特征融合块包括第一部分多尺度特征联合部分和第二部分多尺度特征块结合部分。
3.1).多尺度特征联合部分,包括第一特征块、第二特征块、第三特征块和第四特征块分别为其对应多尺度特征提取块的特征输出;进一步,上述第一特征块、第二特征块、第三特征块和第四特征块经过双线性插值将特征维度统一后,联合为多尺度融合特征块。
3.2).多尺度特征块结合部分,包括第一结合特征块,第二结合特征块,第三结合特征块,第四结合特征块,分别为其对应的第一特征块、第二特征块、第三特征块和第四特征块,通过结合函数α(·),与多尺度融合特征块结合后的结果。
4.全连接层,使用损失函数指导。全连接层的损失函数为
具体地,参照图3所示,上述的改进的残差网络的舰船目标定位检测方法,包括以下步骤:
1.通过遥感传感器获得舰船的高空间分辨率遥感图像,对原始数据集进行输入前处理,获得输入数据集;
2.将数据通过数据输入处理块,对数据进行处理后,输入至多尺度特征提取块中。进一步,图像数据依次通过四个多尺度特征提取块进行特征提取。
1).图像通过三个第一残差单元,每一残差单元使用三层卷积核为1*1的卷积层和一个从残差块输入端到输出端的级联进行特征提取,得到特征F
2).上述特征输出进入四个第二残差单元,每一残差单元使用三层卷积核为3*3的卷积层和一个从残差块输入端到输出端的级联进行特征提取,得到特征F
3).上述输出特征输入到四个第三残差单元,每一个第三残差单元包括三个卷积核为5*5的卷积层和一个从残差块输入端到输出端的级联进行特征提取,得到特征F
4).上述输出特征输入到三个第四残差单元进行特征提取,得到特征F
3.分别对每一个多尺度特征提取块输出特征进行双线性插值,使其形成保持在统一维度的四个特征,分别记为F′
4.上述得到的结合特征块F′
本发明提供的一种适用于多种尺度的舰船目标定位检测方法,包括:通过遥感传感器获取目标区域的遥感图像;将所述遥感图像输入多尺度卷积块改进的残差网络模型,输出舰船目标定位的检测结果。该方法使用多尺度卷积层改进的残差网络,通过对每一尺度模块得到的特征图进行融合,得到可以提取多尺度特征的主干网络,通过自定义损失函数指导的全连接层进行最终目标的检测。解决了在舰船检测过程中因目标尺度差异较大而造成的检测效率较差的问题,该方法能够得到相对精准的检测结果,适用于军用及民用的舰船检测作业。
基于同一发明构思,本发明实施例还提供了一种适用于多种尺度的舰船目标定位检测系统,由于该系统所解决问题的原理与一种适用于多种尺度的舰船目标定位检测方法相似,因此该系统的实施可以参见前述方法的实施,重复之处不再赘述。
第二方面,本发明实施例还提供一种适用于多种尺度的舰船目标定位检测系统,参照图5所示,包括:
获取模块,通过遥感传感器获取目标区域的遥感图像;
检测模块,将所述遥感图像输入多尺度卷积块改进的残差网络模型,输出舰船目标定位的检测结果;所述多尺度卷积块改进的残差网络模型包括:数据输入处理块、多尺度特征提取块、多尺度特征融合块和全连接层。
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器和光学存储器等)上实施的计算机程序产品的形式。
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 一种适用于多种尺度的舰船目标定位检测方法与系统
- 一种适用于多种尺度的舰船目标定位检测方法与系统