一种智能化学合成试验平台
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及化学实验仪器设备领域,具体而言,涉及一种智能化学合成试验平台。
背景技术
据统计,平均每个成功上市的新药,科学家需要对10000个潜在药物分子(化合物)进行筛选,虽然这10000个化合物只需少量(毫克到克级),但其巨大的数量和化学合成的劳动密集特性使这项工作消耗大量的时间和资金。除了医药产业外,化学合成对农药、染料、香料,日用化学品,航空材料等的开发起了关键性作用,使化学合成成为人类生产生活中不可或缺的产业。但是,即使经过了50年的发展,化学合成一直是一个劳动密集型、耗费时间且存在固有危险的一个行业。在如今自动化、信息化的时代,化学合成实验所用的仪器、操作方法并没有随之产生巨大的改进。因此不管是在科学研究还是工业生产都受到极大的限制。化学合成一直是人工操作,因此存在各种问题:1)实验底物种类繁多,逐个反应和处理耗时费力;2)小剂量的催化剂称量不准确;3)由于操作失误而造成中毒、火灾、爆炸等危险。目前比较成熟的只有低粘度液体取样,在固体粉末和半固体称量上始终无法做出巨大的突破。在国内外实验室,大部分化学化学合成操作仍然由人工完成,化学合成自动化仍具有很高的挑战性。
为提高化学合成的效率,国内外厂商做了很大努力,并推出了很多产品,但并没有有效的提高效率。在反应准备阶段,称重药品时,Accelab公司的“ContiWe igher”可自动称样,但该系统体积比较庞大,不适用于实验室。而且该装置无法称取不规整的粉末和粘稠状的样品。在移液方面,移液机器人如”LIPOS”(Zinsser Analytic),能自动化的转移液体,但也无法移称取粘稠性的液体和固体。在反应容器方面,一般由耐化学腐蚀的材料制成,同时配有可组装的反应容器。加热/冷却,搅拌,回流,过滤,惰性气体保护等可以平行进行。市面上有“MiniBlock”(Mettler Toledo)和“Carousel”Reaction Station(Radleys)等产品,这种仪器虽然有些优点,但不能解决自动取样和进样问题。在后处理的萃取方面,有自动固相萃取器,例如“VacMaster-96”(Biotage),和自动液相萃取器,例如“ALLEXis”(MettlerToledo,Autochem)。以上都是单独运作的系统,目前也有集成了反应投放和后处理的自动系统,如“SOPHAS”Automated Synthesizer(Zinsser Analytic)。但由于没有解决固体和粘稠液体的称重和转移问题,这种机器多用于多肽合成仪,并不适用于底物种类繁多、状态不一的有机化学合成。
发明内容
本发明的目的在于提供一种智能化学合成试验平台,能够完成液体取放、试剂瓶瓶盖的开启以及固体试剂片取放工作,具有高效且高度自动化的特点。
本发明的实施例是这样实现的:
本发明实施例的一方面,提供一种智能化学合成试验平台,包括:
用于放置试剂瓶的工作平台,所述工作平台上设置有惰性气体和真空保护系统;
置于所述工作平台之上的第一横梁;
置于所述工作平台之上的第二横梁,所述第二横梁活动连接所述第一横梁,并能够沿着所述第一横梁的长度方向往复移动;
置于所述工作平台之上的悬臂梁,所述悬臂梁活动连接所述第二横梁,并能够沿着所述第二横梁的长度方向往复移动,且能够相对所述第二横梁上下往复移动;
其中,所述悬臂梁上集成安设有液体取放机构、试剂瓶瓶盖开关机构和固体试剂片取放机构。
可选地,所述试剂瓶瓶盖开关机构位于所述液体取放机构和所述固体试剂片取放机构之间。
可选地,还包括底端固定于所述工作平台上的立柱,所述第一横梁安装于所述立柱上。
可选地,通过第一电机带动第一同步带轮的形式来实现所述第二横梁沿着所述第一横梁的长度方向往复移动。
可选地,通过第二电机带动第二同步带轮的形式来实现所述悬臂梁沿着所述第二横梁的长度方向往复移动。
可选地,所述工作平台呈矩形。
本发明实施例的另一方面,还提供一种智能化学合成试验平台,包括:
用于放置试剂瓶的工作平台,所述工作平台上设置有惰性气体和真空保护系统;
置于所述工作平台之上的第一横梁;
置于所述工作平台之上的两根呈并行排布的第二横梁,所述两根第二横梁分别活动连接所述第一横梁,并分别能够沿着所述第一横梁的长度方向往复移动;
置于所述工作平台之上的两根呈并行排布的悬臂梁,所述两根悬臂梁分别活动连接所述两根第二横梁,并分别能够沿着所述第二横梁的长度方向往复移动,且能够相对所述第二横梁上下往复移动;
其中,一根所述悬臂梁上安设有液体取放机构和固体试剂片取放机构,另一根所述悬臂梁上安设有试剂瓶瓶盖开关机构。
可选地,还包括底端固定于所述工作平台上的立柱,所述第一横梁安装于所述立柱上。
可选地,通过第一电机带动第一同步带轮的形式来实现所述第二横梁沿着所述第一横梁的长度方向往复移动。
可选地,通过第二电机带动第二同步带轮的形式来实现所述悬臂梁沿着所述第二横梁的长度方向往复移动。
如上所述,由于第二横梁能够沿着该第一横梁的长度方向往复移动,且悬臂梁能够沿着该第二横梁的长度方向往复移动以及能够相对该第二横梁上下往复移动;因此该悬臂梁可移动至该工作平台上的任意一个预定位置;此外,该悬臂梁上集成安设有液体取放机构、试剂瓶瓶盖开关机构和固体试剂片取放机构,因此能够完成液体取放、试剂瓶瓶盖的开启以及固体试剂片取放工作,具有高效且高度自动化的特点。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
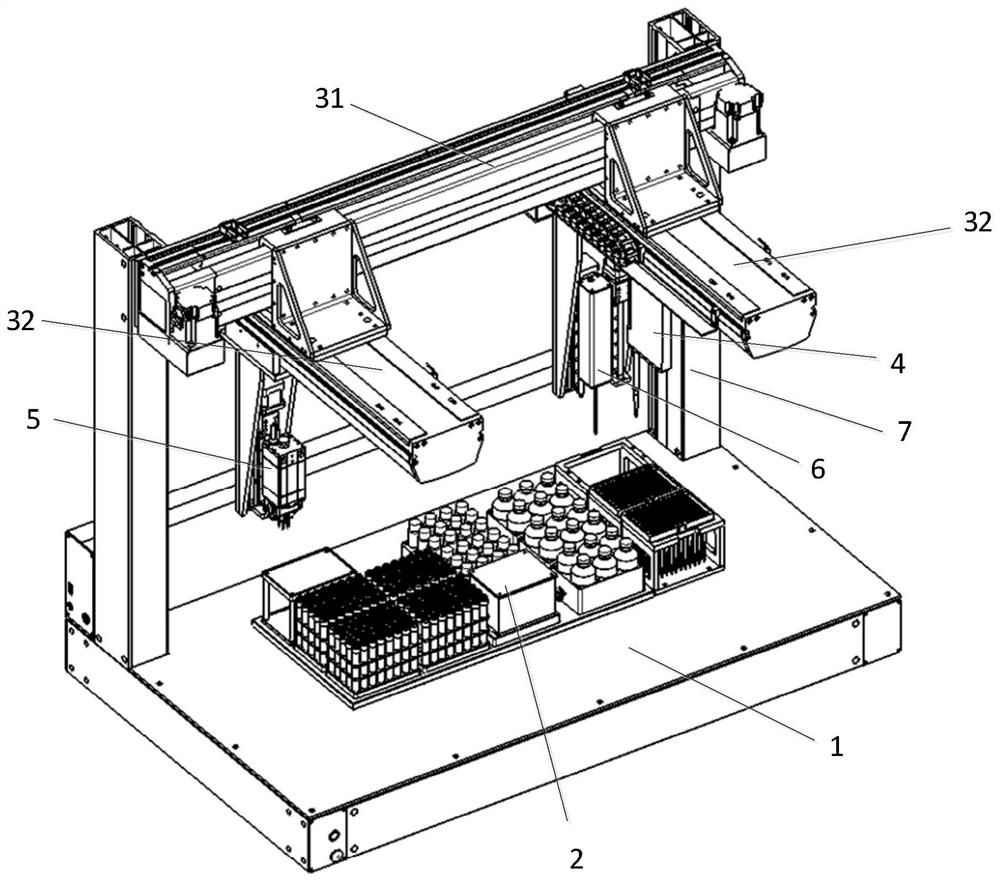
图1为本发明智能化学合成试验平台一实施例的结构示意图;
图2为图1中悬臂梁上集成安设有液体取放机构、试剂瓶瓶盖开关机构和固体试剂片取放机构的示意图;
图3为本发明智能化学合成试验平台另一实施例的结构示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
本实施例提供一种智能化学合成试验平台。请结合参照图和图2所示,该智能化学合成试验平台包括:用于放置试剂瓶的工作平台1,该工作平台1上设置有惰性气体和真空保护系统2;置于该工作平台1之上的第一横梁31;置于该工作平台1之上的第二横梁32,该第二横梁32活动连接该第一横梁31,并能够沿着该第一横梁31的长度方向往复移动;置于该工作平台1之上的悬臂梁33,该悬臂梁33活动连接该第二横梁32,并能够沿着该第二横梁32的长度方向往复移动;且能够相对该第二横梁32上下往复移动;其中,该悬臂梁33上集成安设有液体取放机构4、试剂瓶瓶盖开关机构5和固体试剂片取放机构6。
如上所述,由于第二横梁32能够沿着该第一横梁31的长度方向往复移动,且悬臂梁33能够沿着该第二横梁32的长度方向往复移动以及能够相对该第二横梁32上下往复移动;因此该悬臂梁33可移动至该工作平台1上的任意一个预定位置;此外,该悬臂梁33上集成安设有液体取放机构4、试剂瓶瓶盖开关机构5和固体试剂片取放机构6,因此能够完成液体取放、试剂瓶瓶盖的开启以及固体试剂片取放工作,具有高效且高度自动化的特点。
在上述实施例中,惰性气体和真空保护系统2利用硅胶垫密封,开关阀来控制真空保持和惰性气体的保持。原位开关盖系统,利用硅胶管被螺丝锁紧压缩并挤压各种试剂瓶来产生足够摩擦力,以便在开盖系统开关瓶盖的时候保持瓶身不动。
在上述实施例中,该试剂瓶瓶盖开关机构5位于该液体取放机构4和该固体试剂片取放机构6之间。该工作平台1大致呈一矩形的工作平台1。
在上述实施例中,该第二横梁32沿着该第一横梁31的长度方向往复移动以及该悬臂梁33沿着该第二横梁32的长度方向往复移动均是通过电机带动同步带轮的形式予以实现。详细而言,可通过第一电机带动第一同步带轮的形式来实现该第二横梁32沿着该第一横梁31的长度方向往复移动。可通过第二电机带动第二同步带轮的形式来实现该悬臂梁33沿着该第二横梁32的长度方向往复移动。
在上述实施例中,至于第一横梁31的固定形式,例如还可设置一个立柱7,该立柱7的底端固定于该工作平台1上,该第一横梁31安装于该立柱7上,如此,可实现第一横梁31相对该工作平台1形成一稳固结构。
如图3,在另一个实施例中,本实施例还公开了一种智能化学合成试验平台,其包括:用于放置试剂瓶的工作平台1,所述工作平台1上设置有惰性气体和真空保护系统2;置于所述工作平台1之上的第一横梁31;置于所述工作平台1之上的两根呈并行排布的第二横梁32,所述两根第二横梁32分别活动连接所述第一横梁31,并分别能够沿着所述第一横梁31的长度方向往复移动;置于所述工作平台1之上的两根呈并行排布的悬臂梁,所述两根悬臂梁分别活动连接所述两根第二横梁32,并分别能够沿着所述第二横梁32的长度方向往复移动,且能够相对所述第二横梁32上下往复移动;其中,一根所述悬臂梁上安设有液体取放机构4和固体试剂片取放机构6,另一根所述悬臂梁上安设有试剂瓶瓶盖开关机构5。与图1所示的智能化学合成试验平台相比而言,采用了两根呈并行排布的第一横梁31,两根呈并行排布的第二横梁32,两根呈并行排布的悬臂梁,而且将液体取放机构4和固体试剂片取放机构6集成安设在一根所述悬臂梁上,试剂瓶瓶盖开关机构5安设在另一根所述悬臂梁上,这样可以使得开盖动作与液体取放或者开盖动作与固体取放同时进行,从而可有效提高工作效率。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种智能化学合成试验平台
- 一种叉车驱动桥制动智能检测试验平台