引线接合方法以及引线接合装置
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及引线接合方法以及引线接合装置。
背景技术
图9为表示以往的半导体装置的剖视图。
该半导体产品具备:具有第一接合面101a的第一电极101;和具有第二接合面102a的第二电极102,通过接合线103,104以及布线105电连接第一接合面101a和第二接合面102a。
图10为说明制造图9所示的半导体产品时的以往的引线接合方法的流程图。
首先,将工件安置于未图示的引线接合装置的接合载置台(图10的S1)。
接下来,通过将接合线103与第一电极101的第一接合面101a和布线105连接,从而通过接合线103电连接第一电极101和布线105(图10的S2)。
接下来,通过旋转机构使接合载置台旋转90°,从而引线接合装置设为能接合第二接合面102a的状态(图10的S3)。
接下来,通过将接合线104与第二电极102的第二接合面102a和布线105连接,从而通过接合线104电连接第二电极102和布线105(图10的S4)。
接下来,将工件从接合载置台拆除。这样能够制造图9所示的半导体产品。与此相关的技术记载于专利文献1中。
然而,在想要取得第一接合面101a与第二接合面102a那样的不同的两面的电连接的情况下,不使用由一根接合线将第一接合面101a和第二接合面102a直接结合的方法,而如上述以往的引线接合方法那样,通过追加在各个面内进行接合,连接不同的两面的布线电路来进行应对。
在先技术文献
专利文献
专利文献1:日本专利第6316340号公报
发明内容
-发明所要解决的课题-
在上述以往的引线接合方法中,需要设置两根接合线,因而需要进行两次引线接合工序,生产间隔时间降低。此外,通过追加布线电路从而产品成本也上升。
本发明的一方式的课题在于提供一种在不同的两个面能以1次的引线接合工序进行接合连接的引线接合方法或者引线接合装置。
-用于解决课题的手段-
以下对本发明的各种方式进行说明。
[1]一种引线接合方法,线的一端与第一接合面相结合,所述线的另一端与第二接合面相结合,所述引线接合方法的特征在于,具备:
工序(a),将从毛细管的前端抽出的线的一端与所述第一接合面结合;
工序(b),从该毛细管的前端抽出所述线并使所述毛细管在Z方向上移动;
工序(c),从该毛细管的前端抽出所述线并使所述毛细管在包括X方向以及Y方向的至少一个的方向上移动;
工序(d),从该毛细管的前端抽出所述线并使所述毛细管在包括X方向、Y方向以及Z方向的至少一个的方向上移动多次;
工序(e),使所述毛细管移动到最高的位置;和
工序(f),使所述毛细管移动到所述第二接合面,将所述线的另一端与所述第二接合面相结合,
包括以下工序,通过在所述工序(b)至所述工序(e)之间的任意定时以旋转轴为中心使所述第一接合面旋转,从而使所述第二接合面移动到能接合的位置,
所述第一接合面与所述第二接合面在所述线拉伸的一侧形成的角度为200°以上(优选为220°以上,更优选为240°以上,进一步优选为255°以上)。
[2]根据上述[1]的引线接合方法,其特征在于,所述角度为240°以上。
[3]根据上述[1]或者[2]的引线接合方法,其特征在于,所述任意的定时为刚好在所述工序(b)之后、所述工序(c)的中途、刚好在所述工序(c)之后、所述工序(d)的中途以及刚好在所述工序(e)之前的任意一个。
[4]一种引线接合装置,将线的一端与第一接合面相结合,将所述线的另一端与第二接合面相结合,所述引线接合装置的特征在于,
具备:
毛细管,具有插通所述线的贯通孔;
X移动机构,使所述毛细管相对于所述第一接合面或者所述第二接合面在X方向上相对移动;
Y移动机构,使所述毛细管相对于所述第一接合面或者所述第二接合面在Y方向上相对移动;
Z移动机构,使所述毛细管相对于所述第一接合面或者所述第二接合面在Z方向上相对移动;
载物台,保持具有所述第一接合面以及所述第二接合面的工件;
旋转机构,使所述载物台旋转;
控制部,控制所述毛细管、所述X移动机构、所述Y移动机构、所述Z移动机构以及所述旋转机构,
所述控制部为对以下的动作(a)至动作(g)进行控制的部分,
具有:
动作(a),将从所述毛细管的前端抽出的线的一端与所述第一接合面相结合;
动作(b),从该毛细管的前端抽出所述线并使所述毛细管在Z方向上移动;
动作(c),从该毛细管的前端抽出所述线并使所述毛细管在包括X方向以及Y方向的至少一个的方向上移动;
动作(d),从该毛细管的前端抽出所述线并使所述毛细管在包括X方向、Y方向以及Z方向的至少一个的方向上移动多次;
动作(e),使所述毛细管移动到最高的位置;
动作(f),使所述毛细管移动到所述第二接合面,将所述线的另一端与所述第二接合面相结合,
控制动作(g),所述动作(g)为以下动作,即通过在所述动作(b)至所述动作(e)之间的任意的定时,通过所述旋转机构使所述载物台旋转,从而使所述第二接合面移动到能接合的位置,
所述第一接合面和所述第二接合面在所述线拉伸的一侧形成的角度为200°以上(优选为220°以上,更优选为240°以上,进一步优选为255°以上)。
-发明效果-
根据本发明的一方式,能够提供一种在不同的2面能以1次的引线接合工序进行接合连接的引线接合方法或者引线接合装置。
附图说明
图1是表示通过本发明的一方式所涉及的引线接合方法进行了连接的半导体产品的剖视图。
图2是用于说明本发明的一方式所涉及的引线接合方法的剖视图。
图3是用于说明图2所示的引线接合方法的流程图。
图4是表示用于实施本发明的一方式所涉及的引线接合方法的引线接合装置的一部分的示意图。
图5是表示图4所示的引线接合装置的接合载置台以及旋转轴的立体图。
图6是用于说明本发明的一方式所涉及的引线接合方法的示意图。
图7是表示由图6所示的引线接合方法进行的环路控制的一例的示意图。
图8是用于说明使接合载置台34旋转的定时和接合线13的环形形状的关系的图。
图9是表示以往的半导体产品的剖视图。
图10是说明制造图9所示的半导体产品时的以往的引线接合方法的流程图。
具体实施方式
以下,使用附图对本发明的实施方式详细地进行说明。其中,本发明并不限于以下的说明,不脱离本发明的主旨及其范围而能对其方式以及详细内容进行各种变更,关于这一点对于本领域技术人员来说容易被理解。因此,本发明不应解释为限定于以下所示的实施方式的记载内容。
图1是表示通过本发明的一方式所涉及的引线接合方法所连接的半导体产品的剖视图。
图1所示的半导体产品具备:具有第一接合面11a的第一电极11;和具有第二接合面12a的第二电极12,通过接合线13电连接第一接合面11a和第二接合面12a。第一电极11以及第二电极12分别形成于产品(工件)10。
第一接合面11a和第二接合面12a位于不同的平面上。第一接合面11a与第二接合面12a在接合线13拉伸一侧所形成的角度14为270°(参照图1)。
另外,在本实施方式中,第一接合面11a与第二接合面12a所形成的角度14为270°,但该角度只要为200°以上即可,优选为220°以上,更优选为240°以上,进一步优选为255°以上。
图2是用于说明本发明的一方式所涉及的引线接合方法的剖视图。图3为用于说明图2所示的引线接合方法的流程图。
首先,将工件10安置于接合载置台(未图示)(图3的S11)。
接下来,如图2的(a)所示那样,使超声波喇叭形辐射体(未图示)保持插通了线21的毛细管22,从毛细管22抽出线21,通过对从毛细管22的前端突出的线21的前端和放电电极(未图示)之间施加高电压从而引起火花放电,通过该放电能量使线21的前端部熔融而创建球,将该球按压到第一电极11的第一接合面11a上并施加超声波。由此,将线21的一端通过凸块(bump)与第一电极11的第一接合面11a进行结合。
接下来,将线21从毛细管22抽出并使毛细管22在Z方向上移动(上升)。之后,抽出了线21并使毛细管22在包括X方向以及Y方向的至少一个的方向上移动,使接合载置台相对于旋转中心23如箭头24那样旋转90°(参照图2的(b))。由此,能够使第二电极12的第二接合面12a移动到能引线接合的位置。
由于在上述的定时使接合载置台旋转90°,因而能在线21的环路控制的中途,毛细管22与产品10相接触之前使接合载置台旋转,能够创建无障碍物的自由空间25(参照图2的(c))。接下来,使毛细管22在自由空间25从该毛细管的前端沿着抽出了所述线并包括X方向、Y方向以及Z方向的至少一个的方向上移动1次或者多次移动。
接下来,使毛细管22移动到最高位置(未图示)。
另外,上述的说明中,在使毛细管22在Z方向上移动(上升)之后,使毛细管22在包括X方向以及Y方向的至少一个的方向上移动,使接合载置台旋转90°,但如果使接合载置台旋转的定时为使毛细管22在Z方向上移动(上升)后则也可为使毛细管22在包括X方向以及Y方向的至少一个的方向上移动之前,也可与使毛细管22在包括X方向以及Y方向的至少一个的方向上移动同时,也可为处于使毛细管22在包括X方向、Y方向以及Z方向的至少一个的方向上移动多次期间,也可为其之后不久。
接下来,使毛细管22在第二电极12的第二接合面12a上移动,将线21的另一端与第二接合面12a结合(未图示)。这样能够制作图1所示的将接合线13的一端与第一接合面11a结合,将接合线13的另一端与第二接合面12a结合的半导体产品(图3的S12)。接下来,将工件10从接合载置台拆除(图3的S13)。
另外,在图2的(b)所示的工序中,使接合载置台旋转90°时的旋转轴也可与第一接合面11a平行,也可位于第一接合面11a上。此外,如果能以1次的接合工序连接第一接合面和第二接合面,则接合载置台的旋转方向没有特别地限定,旋转轴也可不与第一接合面11a平行。
上述的引线接合方法中,能够实现具有小凸起的环形形状的接合线13。其理由如下。
在将接合线13的一端与第一接合面11a结合之后,从毛细管抽出线并使毛细管在Z方向上移动(上升),为了不与图2的半导体产品的工件相接触而限制运动。进而,如果使毛细管在X方向、Y方向和Z方向上上升结束后进行旋转动作则线被从毛细管过量地抽出。其结果是,完成的接合线的环状形状容易成为凸起大的形状。
与此相对,在上述的引线接合方法中,在将线21的一端与第一电极11的第一接合面11a结合,使毛细管22在Z方向上移动(上升)之后,或者使毛细管22在包括X方向以及Y方向的至少一个的方向上移动的期间,或者使毛细管22在包括X方向、Y方向以及Z方向的至少一个的方向上移动多次的期间,或者使毛细管22移动到最高位置之前,使接合载置台旋转90°。由此,即使不从毛细管22过量地抽出线21也能使毛细管22与工件不接触。其结果是,能够实现具有小凸起的环形形状的接合线13。
此外,在接合线的环状形状的凸起大的情况下,存在以下那样的问题。
通过线的使用量增加,从而产品成本上升。此外,产品的小型化、稳定性、电特性变差,产品的品质降低,并且产品的价值下降。
此外,上述的引线接合方法与图9以及图10所示的引线接合方法相比,能将接合工序从2次减少为1次,由于不需要连接不同的面与面的布线105,因而能够降低产品成本。
接下来,对本发明的一方式所涉及的引线接合装置以及引线接合方法更详细地进行说明。
图4是表示用于实施本发明的一方式所涉及的引线接合方法的引线接合装置的一部分的示意图。图5是表示图4所示的引线接合装置的接合载置台以及旋转轴的立体图。
如图4以及图5所示那样,引线接合装置具有:具有将线插通的贯通孔的毛细管22;使该毛细管22相对于第一接合面或者第二接合面在X方向上相对移动的X移动机构31;使毛细管22相对于第一接合面或者第二接合面在Y方向上相对移动的Y移动机构32;使毛细管22相对第一接合面或者第二接合面在Z方向上相对移动的Z移动机构33;对具有第一接合面以及第二接合面的工件进行保持的接合载置台34;使接合载置台34旋转的旋转机构35;和对毛细管22、X移动机构31、Y移动机构32、Z移动机构33以及旋转机构35进行控制的控制部38。
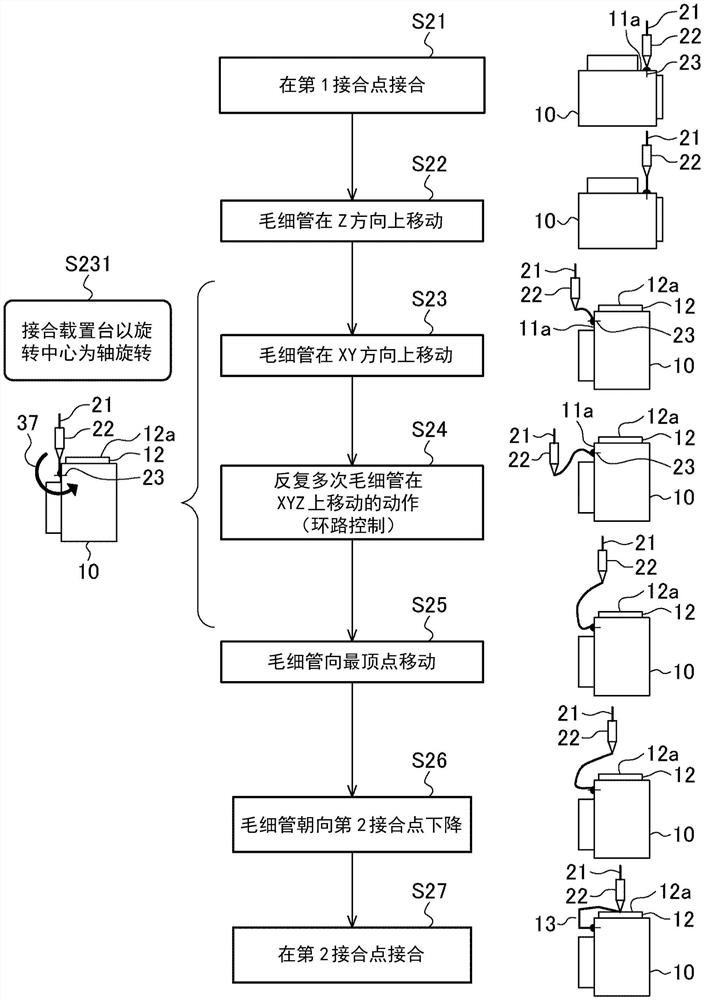
图6是用于说明本发明的一方式所涉及的引线接合方法的示意图。图7为表示由图6所示的引线接合方法进行的环路控制的一例的示意图。
首先,将工件10载置于图4以及图5所示的接合载置台34。
接下来,使超声波喇叭形辐射体41保持线21被插通的毛细管22,从毛细管22抽出线21,通过对从毛细管22的前端突出的线21的前端与放电电极之间施加高电压从而引起火花放电,通过该放电能量使线21的前端部熔融而创建球,将该球按压于第一接合面11a上并施加超声波。由此,如图6所示那样,将线21的一端与第一接合面11a的第一接合点相结合(图6的S21)。
接下来,从毛细管22抽出线21并使毛细管22在Z方向上移动(图6的S22)。此时,毛细管22如图7所示的移动轨迹51那样移动。
此后,抽出线21并使毛细管22在包括X方向以及Y方向的至少一个的方向上移动(图6的S23)。此时,毛细管22如图7所示的移动轨迹52那样移动。
接下来,抽出线21并使毛细管22在包括X方向、Y方向以及Z方向的至少一个的方向上移动多次(图6的S24)。而且,毛细管22被移动到最高的位置(顶点)(图6的S25)。此时,毛细管22如图7所示的移动轨迹53、54、55那样移动。
以图6所示的步骤S22和步骤S25之间的任意定时(例如图7所示的(2)、(3)、(4)),通过图5所示的旋转机构35使接合载置台34如箭头37那样以旋转中心36为轴旋转90°,从而使第二接合面12a移动到能接合的位置(图6的S231)。由此,能够在进行线的环路控制时创建无障碍物的自由空间。另外,图7的(1)所示的旋转的定时为比较例。该比较例中,由于在使毛细管22移动到最高的位置(顶点)之后使其进行旋转动作,从而从毛细管过量地抽出线,其结果是,完成的接合线的环状形状成为凸起大的形状(参照图8的(1))。
此外,即使为图7的(4)所示的旋转的定时,第一接合点例如位于身长高的单片(chip)上等情况下,根据产品的形状使毛细管在XY方向上移动之前使接合载置台旋转,毛细管也不与产品接触。
接下来,使毛细管22朝向第二接合点下降,并使毛细管22移动到第二电极12的第二接合面12a(图6的S26)。而且,将线21的另一端与第二电极12的第二接合面12a结合(图6的S27)。
另外,图6所示的步骤S21~S27、S231所示的工序的动作被控制部38控制。
根据本实施方式,环路控制中毛细管22能不与障碍物接触,因而不需要用于避开障碍物的动作,能够抑制抽出过量的线。其结果是,有可能形成松弛小的低环状。
此外,在本实施方式中,通过在图6所示的步骤S22与步骤S25之间的任意的定时使接合载置台34旋转,从而能够将该旋转用作接合线的环状形成的习惯动作。这样通过将接合载置台34的旋转动作用作环状形状的习惯,从而有可能形成更复杂的形状的环状。
图8是用于说明使接合载置台34旋转的定时和接合线13的环状形状的关系的图。
如果在图7所示的(1)定时进行旋转动作,则成为图8所示的(1)那样的环状形状。此外,如果在图7所示的(2)的定时进行旋转动作,则成为图8所示的(2)那样的环状形状。此外,如果在图7所示的(3)的定时进行旋转动作,则成为图8所示的(3)那样的环状形状。
另外,在本实施方式中,对第一接合面与第二接合面的角度为270°的情况进行了说明,但在200°以上(优选220°以上,更优选240°以上,进一步优选255°以上)的情况下,也能创建任意的环状形状。
此外,如上述那样由于不需要毛细管22避开障碍物的动作,能形成任意的复杂的环状形状,因而能够呈现以下那样的效果。
·产品的低环状化
·产品的小型化
·产品性能的稳定化
·产品的低成本化
·金线消耗量的减少
·电路的削减
·制造时间的缩短(制造效率提高)
·装置、产品的破损防止
·产品开发期间的缩短
-符号说明-
10…产品(工件)
11…第一电极
11a…第一接合面
12…第二电极
12a…第二接合面
13…接合线
14…第一接合面与第二接合面所形成的角度
21…线
22…毛细管
23…旋转中心
24…箭头
25…自由空间
31…X移动机构
32…Y移动机构
33…Z移动机构
34…接合载置台
35…旋转机构
36…旋转中心
37…箭头
41…超声波喇叭形辐射体
51、52、53、54、55…移动轨迹
101…第一电极
101a…第一接合面
102…第二电极
102a…第二接合面
103、104…接合线
105…布线。
- 引线环及其半导体器件、引线接合方法和引线接合装置
- 引线接合装置、引线接合装置用电路以及半导体装置的制造方法