一种智能行车吊具
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及行车吊具技术领域,更具体地说,涉及一种智能行车吊具。
背景技术
随着智能化的不断发展,无人化智能行车也在快速推广,许多企业都在做无人智能行车的升级改造,智能行车利用传感和计算机技术,配合仓库管理系统,实现了产品下线、入库、上线、装车的无人化操作,无人行车具有可以减少人员,提高效率,提高安全性等优点,已被越来越多的企业采用,在钢铁企业使用较多,特别是钢卷的出入库和转运工作。
仓库管理系统会根据行车的入库、移库和出库的信息,管理库位,正常情况下,实物和系统中的信息必须完全一致,否则,就会出现出入库信息与实物不符,造成出入库信息混乱,出现这种情况必须进行盘库核对。到智能库区的网络连接中断、物品有人为移动、产品下线工位有错位时,都会出现实物与库位信息不一致的异常情况,当某个库位上系统显示是空的,而实际上却有一个物品时,无人行车就会将另外一个物品吊运落到系统认为是空的这个库位上,这时候危险就会发生,另一个物品就会砸到这个物品上,对于钢厂这种事情每次发生都会造成很大的损失,许多智能库区都出现过这种情况,目前尚无很好的解决办法。
无人行车往下放物品的时候,属于盲放,都是根据控制钢丝绳的电机上的编码器来判断物品距离地面的高度的,先是快速下降,计算高度快到地面时减速慢放,如果在行车上面装摄像头,由于吊具上物品的遮挡,依然看不到下面是否有物品。
因此,无人智能行车存在的问题是只能根据库存信息判断库位情况,吊着物品往下放的时候,无法判断下面是否有人或物品,如果下面有人或物品,就会砸上去,造成较大的损失或发生安全事故。
发明内容
1.发明要解决的技术问题
针对现有技术存在的缺陷与不足,本发明提供了一种智能行车吊具,可以判断下面是否有物品的行车吊具,避免砸坏物品,确保无人行车的运行安全。
2.技术方案
为达到上述目的,本发明提供的技术方案为:
本发明的一种智能行车吊具,包括吊具主梁和吊臂,吊臂的下端设有L型的钩头,吊具主梁上设有驱动吊臂开合的电机,吊具主梁内设丝杠,电机和丝杠通过传动机构连接,丝杠与吊臂相连,所述的吊臂的底角外侧设有斜向下的测距传感器。
进一步地,所述的吊臂内侧下方靠近钩头处设有第一水平光电传感器,钩头下面设有第二水平光电传感器,吊臂的内侧设有竖直光电传感器。
进一步地,所述的钩头上表面设有压力传感器。
进一步地,所述的吊臂内侧设有可上下移动的防护滑板,防护滑板的上端通过弹簧吊起。
进一步地,所述的测距传感器与竖直方向的倾角为15°~30°。
进一步地,所述的测距传感器为超声波测距仪或激光测距仪。
3.有益效果
采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
本发明可以通过探测吊具下方高度与地面的比较判断下方是否有物品,确保无人行车自动运行期间的安全,解决了经常因为系统数据不准而出现的上面物品砸落在下面物品上的风险,避免了需要人工实时监控的问题,节约了人力,使无人行车运行更加安全,本发明适用于各类智能装卸行车。
附图说明
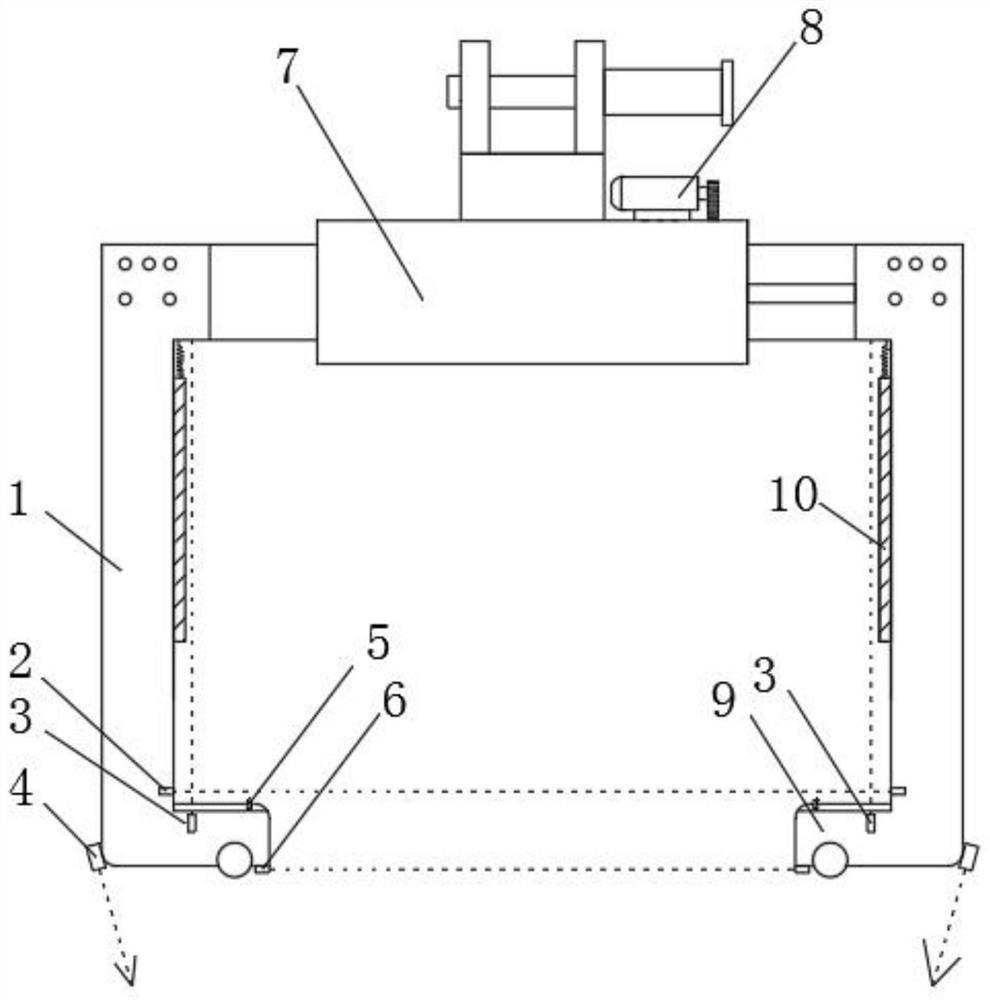
图1为本发明的整体结构图。
图中:1、吊臂;2、第一水平光电传感器;3、竖直光电传感器;4、测距传感器;5、压力传感器;6、第二水平光电传感器;7、吊具主梁;8、电机;9、钩头;10、防护滑板。
具体实施方式
下面结合附图和实施例对本发明作进一步的描述:
实施例1
从图1可以看出,本实施例的一种智能行车吊具,是用于吊钢卷的夹具,包括吊具主梁7和吊臂1,吊臂1的下端设有L型的钩头9,吊具主梁7上设有驱动吊臂1开合的电机8,吊具主梁7内设丝杠,电机8和丝杠通过传动机构连接,丝杠与吊臂1相连,吊臂1的底角外侧设有斜向下的测距传感器4,测距传感器4优选为超声波测距仪或激光测距仪,测距传感器4可以向下探测吊具底角到地面或地面上物体的距离,距离乘以倾角的余弦值就是吊具到地面或地面上物体上表面的高度。
吊臂1内侧下方靠近钩头9处设有第一水平光电传感器2,钩头9下面设有第二水平光电传感器6,当第一水平光电传感器2和第二水平光电传感器6都经过一次遮挡和接通后,说明钩头9已经进入钢卷内心的位置,可以夹紧了,电机8动作带动吊臂1向内夹紧钢卷,吊臂1的内侧设有竖直光电传感器3,图中虚线表示光电传感器的探测光线,当探测光线竖直光电传感器3的光线被遮挡时,说明钢卷已经夹紧了,电机停止,吊臂停止收紧,可以起吊了。
钩头9上表面设有压力传感器5,用于检测物体是否吊起,是否落地,当吊起物体时,压力传感器5会将物体重量传递给系统,所吊起的物体落地时,压力传感器5会显示重力为零,协助系统判定物品是否已经落地,使吊装过程自动化智能化。
吊臂1内侧设有可上下移动的防护滑板10,防护滑板10的上端通过弹簧吊起。
测距传感器4与竖直方向的倾角为15°~30°,优选20°,因为吊具往下放物品时,吊钩上有物品,要想看到物品下方有没有其他物品,从吊具的低部一端或两端倾斜向下探测,才能探测到到吊具的正下方是否有物品。
当高度为3米左右时测距,测距传感器4可以从吊钩上物品的两端斜着向下探测到吊钩的正下方与地面的高度差,从而判断下方有没有物品,解决了上面装摄像头都无法解决的问题。
本发明的工作原理是:智能行车可以电脑控制,通过仓储系统WMS指挥行车的运行和抓取和移动物品,实现无人操作,当库存信息有错误时,库位上可能有物品,为了避免行车再放一个物品砸落上去,本发明的吊具可以发挥作用,每当行车吊运物品到库位上方,即将往下放时,先通过测距传感器4探测一下吊具的高度,用此高度与行车编码器所计算的高度进行对比,如果高度基本相同,说明下面没有物品,可以正常下落,如果探测高度小于编码器计算的高度,说明下面有物品,应立即停止下落,并报警,然后人工现场查看核实,确保不会砸坏下面的物品,这样智能行车就可以更加安全的自动运行了。
本发明可以通过探测吊具下方高度与地面的比较判断下方是否有物品,确保无人行车自动运行期间的安全,解决了经常因为系统数据不准而出现的上面物品砸落在下面物品上的风险,避免了需要人工实时监控的问题,节约了人力,使无人行车运行更加安全,本发明适用于各类智能装卸行车。
以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种行车吊具线缆保护组件及具有保护功能的行车吊具
- 用于吊运卷盘的无人行车智能吊具