一种四轴码垛机器人
文献发布时间:2023-06-19 10:05:17
技术领域
本发明属于码垛机器人技术领域,具体涉及一种四轴码垛机器人。
背景技术
码垛机器人主要应用于作业现场对物品能够按照设定的轨迹路径进行搬运、堆叠。四轴码垛机器人归属于工业机器人范畴,其主要由五个关节组成,其中驱动关节只有4个,最常应用于码垛作业,故称其为四轴码垛机器人。而现有四轴码垛机器人在工程应用过程中有许多缺陷,如:作业空间范围小,密封性能差,寿命短,维护周期短。对于在四轴码垛机器人工程应用过程中出现的以上缺陷,有待进一步的解决。
发明内容
为解决现有技术的不足,本发明提供了一种四轴码垛机器人。
本发明所提供的技术方案如下:
一种四轴码垛机器人,包括:
底座总成;
安装在所述底座总成上的转座总成,所述转座总成相对于所述底座总成做水平旋转运动;
安装在所述转座总成上的大臂总成,所述大臂总成相对于所述转座总成做上下旋转运动;
安装在所述大臂总成上的小臂总成,所述小臂总成相对于所述大臂总成做上下旋转运动;
安装在所述小臂总成上的手腕总成,所述手腕总成相对于所述小臂总成做上下旋转运动,所述手腕总成具有相对其做水平旋转运动的末端法兰;
以及连杆机构,所述连杆机构包括第一直连杆、三角连杆和第二直连杆,所述第一直连杆的一端安装在所述转座总成上,所述第一直连杆的另一端与所述三角连杆的第一个角转动连接,所述三角连杆的第二个角与所述大臂总成转动连接,所述三角连杆的第三个角与所述第二直连杆的一端转动连接,所述第二直连杆的另一端与所述手腕总成转动连接,所述大臂总成的旋转轴、所述小臂总成的旋转轴和所述手腕总成的旋转轴皆相互平行,所述小臂总成的旋转轴于所述三角连杆的第二个角的转动轴相互平行或共轴。
所述底座总成可安装在地面、墙体或者其他禁止、运动载体上。
基于上述技术方案,转座总成、第一直连杆、大臂总成、三角连杆组成一个相连的四连杆机构;所述第二直连杆、小臂总成和手腕总成组成一个相连的四连杆机构。两个四连杆机构保证要安装在手腕总成上的末端法兰可处于不同角度状态,从而保证四轴码垛机器人能够满足码垛、搬运等功能。
进一步的,所述第一直连杆的一端转动连接在所述转座总成上,所述转座总成、所述第一直连杆、所述三角连杆和所述大臂总成组成第一平行四边形连杆机构,或者,所述转座总成设置有连杆基座,所述连杆基座与所述第一直连杆的一端转动连接,所述转座总成、所述连杆基座、所述第一直连杆、三角连杆和所述大臂总成组成第一平行四边形连杆机构。所述三角连杆、所述第二直连杆、所述手腕总成和所述小臂总成组成第二平行四边形连杆机构。
基于上述技术方案,两个四连杆机构为平行四边形,末端法兰可在任何情况下实现水平状态。
进一步的:
所述转座总成和所述第一直连杆的连接为转动副配合或球面副配合,或者,所述连杆基座和所述第一直连杆的连接为转动副配合或球面副配合;
所述第一直连杆和所述三角连杆的连接为转动副配合或球面副配合;
所述三角连杆和所述第一直连杆的连接为转动副配合或球面副配合;
所述第一直连杆的和所述手腕总成连接为转动副配合或球面副配合。
由于制造的精度问题,当全部转动副配合,会出现连杆出现扭曲问题。本发明将上述四处设计为球面副,这样即可补偿由于制造精度问题导致连杆出现扭曲现象的问题。
进一步的,所述第一直连杆的长度可设置为不同长度;所述第二直连杆的长度可设置为不同长度。
基于上述技术方案,末端法兰与底座的安装面可出现不同的夹角,即可满足四轴码垛机器人的一些特殊情况下的使用。
具体的:
所述转座总成包括第一减速机、转动底座、第一传动轴、第一伺服电机、第二传动轴、第二伺服电机、第二减速机;
所述转动底座转动连接在所述底座总成上,所述第一伺服电机以输出轴向下设置的方向固定在所述底座总成上,所述第一伺服电机的输出轴向下贯穿所述转动底座,所述第一伺服电机的输出轴、所述第一传动轴、所述第一减速机的输入端依次传动连接,所述第一减速机的输出端与所述底座总成固定连接;
所述第二伺服电机以输出轴横向设置的方向固定在所述底座总成上,所述第二伺服电机的输出轴、所述第二传动轴、所述第二减速机的输入端依次传动连接,所述第二减速机的输出端与所述大臂总成的一端固定连接;
所述第一传动轴和所述第一减速机的输入端之间通过第一油封圈油封;所述第二传动轴和所述第二减速机的输出端之间通过第二油封圈油封。
基于上述技术方案,转座总成与底座总成即可发生相对转动;转座总成与大臂总成即可发生相对转动。
具体的,所述三角连杆设置有将其贯穿并与其转动连接的三角连杆轴,所述三角连杆轴的一端固定连接在所述大臂总成远离所述转座总成的一端,所述三角连杆轴的另一端设置有与所述三角连杆固定连接的第一端盖,所述第一端盖与所述三角连杆轴的端部转动连接。
具体的:
所述三角连杆轴中部设置有固定环,所述固定环通过若干紧定螺钉固定连接在所述大臂总成远离所述转座总成的一端上;
所述三角连杆轴远离所述大臂总成的一端配合有沿其轴向布置有若干第一轴承,各所述第一轴承外周转动连接所述三角连杆;
远离所述第一端盖的一个所述第一轴承和所述固定环的一侧之间通过第三油封圈油封;所述固定环的另一侧和所述大臂总成之间通过第一O型密封圈密封;密封的间隙内设置润滑脂。
基于上述技术方案,可以提高四轴码垛机器人的使用寿命,降低维修成本。
具体的:所述小臂总成包括小臂、第三伺服电机、第三传动轴、第三减速机;
所述第三伺服电机以输出轴横向设置的方向固定在所述小臂的一端上,所述第三伺服电机的输出轴、所述第三传动轴、所述第三减速机的输入端依次传动连接,所述第三减速机的输出端固定连接所述大臂总成远离所述转座总成的一端;
所述第三传动轴和所述第三减速机的输入端之间通过第四油封圈油封。
基于上述技术方案,小臂总成与大臂总成即可发生相对转动。
具体的:
所述手腕总成包括手腕、第四伺服电机、第二轴承、第二端盖、手腕轴、第四减速机和末端法兰;
所述第四伺服电机以输出轴向下设置的方向固定在所述手腕上,所述第四伺服电机的输出轴和所述第四减速机的输入端依次传动连接,所述第四减速机的输出端固定连接所述末端法兰;
所述手腕为叉臂结构,其在两臂的端部与所述小臂总成共同贯通设置有手腕轴,所述手腕轴与所述小臂总成转动连接,所述手腕轴的两端分别设置有第二轴承,并分别设置有与所述小臂总成固定连接的第二端盖,各所述第二轴承转动连接所述小臂总成;
两个所述的第二轴承和所述手腕之间通过第五油封圈油封;密封的间隙内设置润滑脂。
基于上述技术方案,第四伺服电机即可带动末端执行机构进行水平转动。
具体的,所述末端法兰预留有安装末端执行机构的安装孔。
本发明的有益效果:
通过对第一直连杆及第二直连杆的长度调整,使末端法兰与底座安装面出现不同的角度,可满足一些特殊情况下的作业;
运动范围广:三角连杆为一个单独零件,转动角度范围不受其他零部件的影响,从而四轴码垛机器人的运动范围受限约束更少,运动范围更广;
密封性更好,寿命更长,维修周期更长:C,G转动副为轴承配合,腔体内加入润滑脂,机械磨损更小,且采用封闭式密封,防止外界的粉尘,金属屑等杂质进入腔体,对零件产生破坏。
附图说明
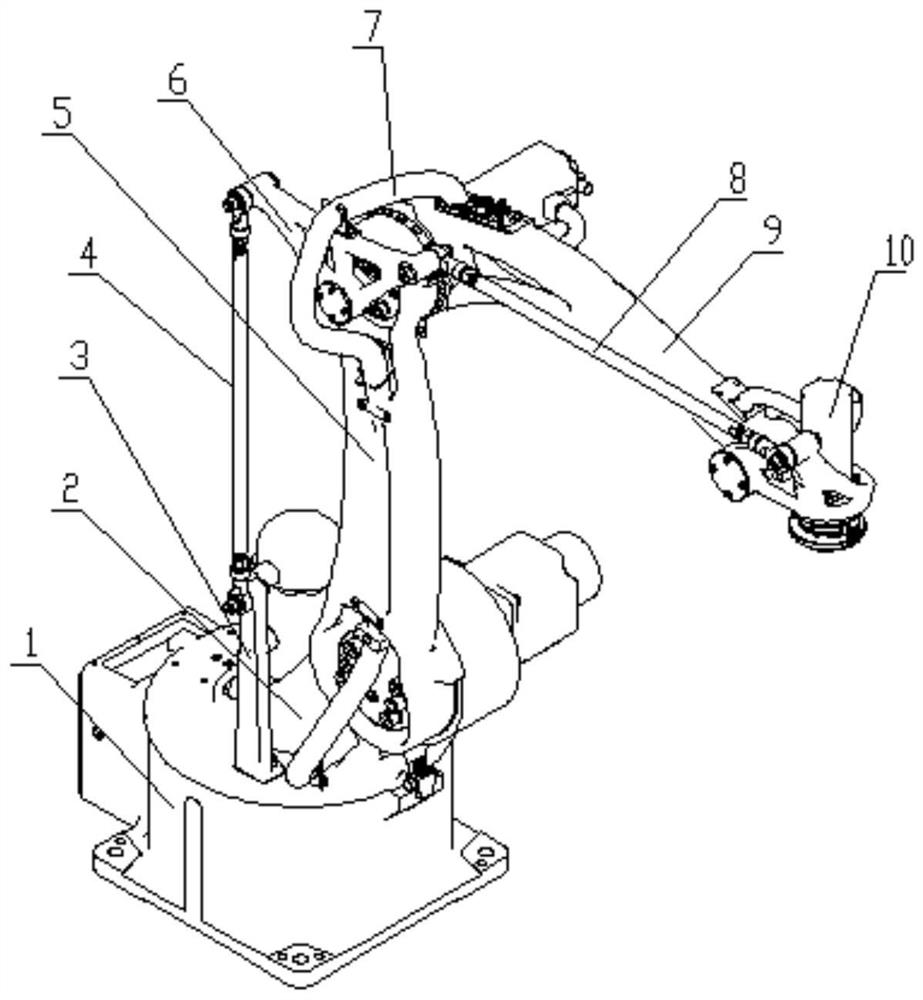
图1是本发明所提供四轴码垛机器人的整体结构轴测示意图。
图2是本发明所提供四轴码垛机器人的各分总成爆炸示意图。
图3是本发明所提供四轴码垛机器人的整体结构正向示意图。
图4是本发明所提供四轴码垛机器人的转座总成爆炸示意图。
图5是本发明所提供四轴码垛机器人的大臂总成爆炸示意图。
图6是本发明所提供四轴码垛机器人的臂总成和手腕总成爆炸示意图。
图7是本发明所提供四轴码垛机器人的两个四连杆机构的原理图。
各附图中,各标号所代表的结构列表如下:
1、底座总成;
2、转座总成,21、第一减速机,22、第一油封圈,23、第一传动轴,24、第二伺服电机,25、第二传动轴,26、第一伺服电机,27、第二油封圈,28、第二减速机,29、转动底座;
3、连杆基座;
4、第一直连杆,41、第一轴肩螺栓,42、第二轴肩螺栓,43、第三轴肩螺栓,44、第四轴肩螺栓;
5、大臂总成,51、大臂;
6、三角连杆,61、第一O型密封圈,62、三角连杆轴,63、第三油封圈,64、第一轴承,65、第一端盖;
7、线束;
8、第二直连杆;
9、小臂总成,91、第三伺服电机,92、第三传动轴,93、第三减速机,94、第四油封圈,95、小臂;
10、手腕总成,101、第四伺服电机,102、第五油封圈,103、第二轴承,104、第二端盖,105、手腕轴,106、第四减速机,107、末端法兰,108、手腕。
具体实施方式
以下对本发明的原理和特征进行描述,所举实施例只用于解释本发明,并非用于限定本发明的范围。
在一个具体实施方式中,如图1、2、3所示,一种四轴码垛机器人包括:底座总成1;安装在底座总成1上的转座总成2,转座总成2相对于底座总成1做水平旋转运动;安装在转座总成2上的大臂总成5,大臂总成5相对于转座总成2做上下旋转运动;安装在大臂总成5上的小臂总成9,小臂总成9相对于大臂总成5做上下旋转运动;安装在小臂总成9上的手腕总成10,手腕总成10相对于小臂总成9做上下旋转运动,手腕总成10具有相对其做水平旋转运动的末端法兰107,末端法兰107预留有安装末端执行机构的安装孔;以及连杆机构,连杆机构包括第一直连杆4、三角连杆6和第二直连杆8,第一直连杆4的一端安装在转座总成2上,第一直连杆4的另一端与三角连杆6的第一个角转动连接,三角连杆6的第二个角与大臂总成5转动连接,三角连杆6的第三个角与第二直连杆8的一端转动连接,第二直连杆8的另一端与手腕总成10转动连接,大臂总成5的旋转轴、小臂总成9的旋转轴和手腕总成10的旋转轴皆相互平行,小臂总成9的旋转轴于三角连杆6的第二个角的转动轴相互平行或共轴。底座总成可安装在地面、墙体或者其他禁止、运动载体上。基于此技术方案,转座总成2、第一直连杆、大臂总成、三角连杆6组成一个相连的四连杆机构;第二直连杆、小臂总成9和手腕总成10组成一个相连的四连杆机构。两个四连杆机构保证要安装在手腕总成10上的末端法兰可处于不同角度状态,从而保证四轴码垛机器人能够满足码垛、搬运等功能。
在一个实施中,第一直连杆4的一端转动连接在转座总成2上,转座总成2、第一直连杆4、三角连杆6和大臂总成5组成第一平行四边形连杆机构。三角连杆6、第二直连杆8、手腕总成10和小臂总成9组成第二平行四边形连杆机构。基于此技术方案,两个四连杆机构为平行四边形,末端法兰可在任何情况下实现水平状态。
在一个实施例中,如图1、2、3所示,转座总成2设置有连杆基座3,连杆基座3与第一直连杆4的一端转动连接,转座总成2、连杆基座3、第一直连杆4、三角连杆6和大臂总成5组成第一平行四边形连杆机构。三角连杆6、第二直连杆8、手腕总成10和小臂总成9组成第二平行四边形连杆机构。基于上述技术方案,两个四连杆机构为平行四边形,末端法兰可在任何情况下实现水平状态。
在一个实施中,连杆基座3和第一直连杆4的连接为转动副配合;第一直连杆4和三角连杆6的连接为转动副配合;三角连杆6和第一直连杆4的连接为转动副配合;第一直连杆4的和手腕总成10连接为转动副配合。基于上述技术方案,即可以实现各连接处的转动连接。
在一个实施例中,连杆基座3和第一直连杆4的连接为球面副配合;第一直连杆4和三角连杆6的连接为球面副配合;三角连杆6和第一直连杆4的连接为球面副配合;第一直连杆4的和手腕总成10连接为转动副配合或球面副配合。由于制造的精度问题,当全部转动副配合,会出现连杆出现扭曲问题。本发明将上述四处设计为球面副,这样即可补偿由于制造精度问题导致连杆出现扭曲现象的问题。
在一个实施中,第一直连杆4的长度可设置为不同长度;第二直连杆8的长度可设置为不同长度。基于此技术方案,末端法兰与底座的安装面可出现不同的夹角,即可满足四轴码垛机器人的一些特殊情况下的使用。
在一个实施中,如图4所示,转座总成2包括第一减速机21、转动底座29、第一传动轴23、第一伺服电机26、第二传动轴25、第二伺服电机24、第二减速机28;转动底座29转动连接在底座总成1上,第一伺服电机26以输出轴向下设置的方向固定在底座总成1上,第一伺服电机26的输出轴向下贯穿转动底座29,第一伺服电机26的输出轴、第一传动轴23、第一减速机21的输入端依次传动连接,第一减速机21的输出端与底座总成1固定连接;第二伺服电机24以输出轴横向设置的方向固定在底座总成1上,第二伺服电机24的输出轴、第二传动轴25、第二减速机28的输入端依次传动连接,第二减速机28的输出端与大臂总成5的一端固定连接;第一传动轴23和第一减速机21的输入端之间通过第一油封圈22油封;第二传动轴25和第二减速机28的输出端之间通过第二油封圈27油封。基于此技术方案,转座总成2与底座总成即可发生相对转动;转座总成2与大臂总成即可发生相对转动。
在一个实施中,如图5所示,三角连杆6设置有将其贯穿并与其转动连接的三角连杆轴62,三角连杆轴62的一端固定连接在大臂总成5远离转座总成2的一端,三角连杆轴62的另一端设置有与三角连杆6固定连接的第一端盖65,第一端盖65与三角连杆轴62的端部转动连接。基于此技术方案,可以通过公用三角连杆实现两个平行四边形连杆机构。
在一个实施中,如图5所示,三角连杆轴62中部设置有固定环,固定环通过若干紧定螺钉固定连接在大臂总成5远离转座总成2的一端上;三角连杆轴62远离大臂总成5的一端配合有沿其轴向布置有若干第一轴承64,各第一轴承64外周转动连接三角连杆6;远离第一端盖65的一个第一轴承64和固定环的一侧之间通过第三油封圈63油封;固定环的另一侧和大臂总成5之间通过第一O型密封圈61密封;密封的间隙内设置润滑脂。基于此技术方案,可以提高四轴码垛机器人的使用寿命,降低维修成本。
在一个实施中,如图5所示,大臂总成5包括大臂51。
在一个实施例中,如图6所示,小臂总成9包括小臂95、第三伺服电机91、第三传动轴92、第三减速机93;第三伺服电机91以输出轴横向设置的方向固定在小臂95的一端上,第三伺服电机91的输出轴、第三传动轴92、第三减速机93的输入端依次传动连接,第三减速机93的输出端固定连接大臂总成5远离转座总成2的一端;第三传动轴92和第三减速机93的输入端之间通过第四油封圈94油封。基于此技术方案,小臂总成9与大臂总成即可发生相对转动。
在一个实施例中,如图6所示,手腕总成10包括手腕108、第四伺服电机101、第二轴承103、第二端盖104、手腕轴105、第四减速机106和末端法兰107;第四伺服电机101以输出轴向下设置的方向固定在手腕108上,第四伺服电机101的输出轴和第四减速机106的输入端依次传动连接,第四减速机106的输出端固定连接末端法兰107;手腕108为叉臂结构,其在两臂的端部与小臂总成9共同贯通设置有手腕轴105,手腕轴105与小臂总成9转动连接,手腕轴105的两端分别设置有第二轴承103,并分别设置有与小臂总成9固定连接的第二端盖104,各第二轴承103转动连接小臂总成9;两个的第二轴承103和手腕108之间通过第五油封圈102油封;密封的间隙内设置润滑脂。基于此技术方案,第四伺服电机即可带动末端执行机构进行水平转动。
在一个实施中,第一伺服电机26通过若干紧定螺钉固定在底座总成1上;第一减速机21的输出端通过若干紧定螺钉固定连接在底座总成1上;第二伺服电机24以输出轴横向设置的方向通过若干紧定螺钉固定连接在底座总成1的水平安装孔上;第二减速机28的输出端通过若干紧定螺钉固定连接在大臂总成5的一端;第一直连杆4通过第一轴肩螺栓41与转座总成2转动连接;三角连杆6通过第二轴肩螺栓42与第一直连杆4转动连接;三角连杆6还通过第三轴肩螺栓43与第二直连杆8转动连接;二直连杆8通过第四轴肩螺栓44与手腕总成10转动连接;第三伺服电机91以输出轴横向设置的方向通过若干紧定螺钉固定连接在小臂95的一端的水平安装孔上;第三减速机93的输出端通过若干紧定螺钉固定连接在大臂总成5远离转座总成2的一端上;第四伺服电机101以输出轴向下设置的方向通过若干紧定螺钉固定在手腕108上的竖向安装孔上;第四减速机106的输出端通过若干紧定螺钉固定连接末端法兰107上。基于此技术方案,可以方便可靠的实现各固定连接处的固定连接。
在一个实施中,线束7可穿出转座总成2、穿过大臂51、绕过三角连杆6、穿过小臂95,再分别连接至第三伺服电机91和第四伺服电机101。线束7可通过线管等固定在三角连杆6上。
如图7所示,为连杆基座3、第一直连杆4、三角连杆6和大臂总成5组成第一平行四边形连杆机构,以及三角连杆6、第二直连杆8、手腕总成10和小臂总成9组成第二平行四边形连杆机构的原理图。连杆基座3与第一直连杆4的连接记为A转动副或球面副;第一直连杆4与述三角连杆6的连接记为D转动副或球面副;三角连杆6和大臂总成5连接记为转动副C;大臂总成5和转座总成2的连接记为转动副B;述三角连杆6和第二直连杆8的连接记为E转动副或球面副;第二直连杆8和手腕总成10之间的连接记为F转动副或球面副;手腕总成10和小臂总成9的连接记为转动副G。其中,ADCB构成一个平行四边形。CEFG构成一个平行四边形。通过两个四连杆机构的配合,可保证要安装在手腕总成10上的末端法兰可处于不同角度状态,从而保证四轴码垛机器人能够满足码垛、搬运等功能。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种四轴码垛机器人
- 一种定位精度高的四轴码垛机器人