飞机和用于运行飞机的方法
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及一种飞机和一种运行飞机的方法。
背景技术
无人驾驶飞机、也称为Unmanned Aerial Vehicle(UAV)、Unmanned Aircraft(UA)、Unmanned Aircraft System(UAS)或者还通俗地称为“无人机”,根据运输能力和配备用于不同的目的、例如用于运输货物或用于借助集成的照相机和/或传感器的监控目的。根据应用领域,在此对起飞或者升起、降落或者着陆和/或向前飞行或者这些飞行方式之间的转变提出了不同的要求。
发明内容
本发明的目的是:说明一种飞机和一种用于运行飞机的方法,其中通过简单且可靠的方式能够实现不同飞行方式和/或不同飞行方式之间的转变。
所述目的通过根据独立权利要求所述的飞机和方法得以实现。
根据本发明的一种观点的飞机具有:至少一个机身,该机身具有前部机身区段和后部机身区段;设置在所述前部机身区段的区域中的至少一个机翼;设置在所述前部机身区段的区域中和/或所述机翼上的至少一个第一驱动装置,该第一驱动装置设计为用于产生推力和/或升力;和至少一个升降舵组,该升降舵组设计为用于使飞机在飞行期间围绕飞机的横轴线转动和/或稳定。优选地,升降舵组安装在机身上、特别是安装在后部或前部机身区段上,并且所述后部机身区段能够相对前部机身区段围绕基本上平行于飞机的横轴线的枢转轴线枢转。替换地或补充地,升降舵组安装在支承在机身上和/或机翼上的至少一个支承元件上,该支承元件能够相对机身或者机翼围绕基本上平行于飞机的横轴线的枢转轴线枢转。
根据本发明的第二观点,在用于运行升降舵组安装在机身上的飞机的方法中,后部机身区段相对前部机身区段围绕基本上平行于飞机的横轴线的枢转轴线枢转。替换地或补充地,在升降舵组安装在至少一个支承在机身上和/或机翼上的支承元件上的飞机中,支承元件相对机身或者机翼围绕基本上平行于飞机的横轴线的枢转轴线枢转。
本发明的优选观点基于如下的方案:为飞机配备可枢转的尾部。优选地,在可枢转的尾部上安装有特别是具有水平尾翼和/或水平舵的升降舵组。然而替换地,升降舵组也可以安装在前部机身区段的区域中、可能情况下甚至安装在机翼前。可枢转的尾部例如可以通过飞机机身的相对前部机身区段可枢转的后部机身区段构成,该后部机身区段在这种情况中也可以称为倾斜机身(英文:tilt fuselage)。然而替换地或补充地,可枢转的尾部也可以通过一个或多个优选长形的支承元件如异形板条或管子构成,这些支承元件严格地讲不一定本身必须是机身的一部分,而更确切地说是可枢转地支承在机身上和/或一个机翼或多个机翼上。在两种变型方案中,优选位于后部机身区段或者支承元件的远中端部上的升降舵组可以与后部机身区段或者支承元件一起相对前部机身区段、机身或者机翼枢转并且在此进入不同的枢转位置或者空间定向中。这样可以使尾部例如进入基本上平行于或者垂直于飞机的机身或者纵轴线延伸的定向中。
由此能够实现不同的组态,利用这些组态能够通过简单且可靠的方式实现升起或者起飞和/或着陆或者降落和/或向前飞行以及这些飞行方式之间的转变。
优选设置有至少一个枢转装置或枢转机构,其设计为用于使后部机身区段相对前部机身区段和/或使所述至少一个支承元件相对机身或者机翼围绕所述枢转轴线枢转。枢转装置优选设计为用于使后部机身区段或者所述至少一个支承元件从第一定向枢转到基本上垂直于该第一定向延伸的第二定向中。在此优选地,后部机身区段或者所述至少一个支承元件在第一定向中基本上平行于飞机的纵轴线延伸并且在第二定向中基本上垂直于飞机的纵轴线延伸。
通过这种方式能够使可枢转的尾部进入不同的特别是在起动、向前飞行和/或着陆时有利的位置或者定向中。
这样通过这种方式例如能够实现的是:飞机在起动前和/或在着陆后可以在成角度弯曲的、就是说在第二定向中或者垂直于纵轴线延伸的尾部上竖立在地面上。在这种情况中,飞机的纵轴线基本上竖直地延伸,使得在常规飞机中通常只产生用于向前飞行的推力的第一驱动装置也能够用于产生使飞机升起或者受控着陆的升力。
优选地,枢转装置具有枢转驱动单元、特别是电机和已经和/或可与该枢转驱动单元机械联接的枢转传动装置,通过该枢转传动装置,后部机身区段相对前部机身区段和/或所述至少一个支承元件相对机身或者机翼围绕枢转轴线可枢转地支承。
优选地,枢转传动装置构造为自锁的传动装置。在此,它优选可以是任意类型的传动装置,在该传动装置中通过互相贴合和/或相互啮合的传动件之间的摩擦产生克服所述互相贴合或者相互啮合的传动件滑动或扭转的阻力。传动装置在能够经由驱动轴、而不是经由从动轴驱动时优选是自锁的。
原则上以下的传动装置适于此,即,其中驱动传动元件、例如由电机驱动的、形式为螺杆的驱动轴经由螺纹连接与被驱动的、形式为配合支承在螺杆上的螺母的传动元件联接。然而在传动装置中也可以通过高传动比和/或转动惯量和/或小的效率实现自锁的效果。
优选地,枢转传动装置具有蜗轮蜗杆传动装置或者该枢转传动装置构造为蜗轮蜗杆传动装置。枢转传动装置优选具有:螺旋形的传动元件、特别是蜗杆,该传动元件能够由枢转驱动单元驱动进行围绕第一旋转轴线的旋转运动;以及与螺旋形的传动元件啮合的齿轮、特别是蜗轮,该齿轮通过传动元件围绕第一旋转轴线的旋转运动而能够围绕基本上垂直于第一旋转轴线的第二旋转轴线旋转,该旋转轴线特别是沿着枢转轴线延伸。
通过使用至少一个这样的、特别是构造为自锁的传动装置的枢转传动装置,后部机身区段能够相对前部机身区段或者所述至少一个支承元件能够相对机身或者机翼一方面精确地围绕枢转轴线枢转,并且另一方面在为此不强制性需要额外的止动元件的情况下能够可靠地保持在分别占据的枢转位置中。
优选地,飞机具有至少一个设置在升降舵组上和/或后部机身区段上和/或所述至少一个支承元件上的第二驱动装置,该第二驱动装置设计为用于产生升力。
例如第二驱动装置可以构造为螺旋桨或叶轮。叶轮优选是由环形或管形的壳体包围的螺旋桨。
优选地,第二驱动装置构造为叶轮,该叶轮集成在安装在后部机身区段上或者所述至少一个支承元件上的升降舵组中。通过将叶轮整合在升降舵组中,改善该升降舵组相对例如安装在该升降舵组上的螺旋桨的空气动力学性能。这特别是在后部机身区段或者所述至少一个支承元件在基本上平行于飞机的特别是水平定向的纵轴线延伸或者定向的第一定向中的飞机组态或者运行模式中适用,如这例如在下面详细说明的第二悬浮模式和/或特别是在向前飞行模式中的情况那样。因此第二驱动装置特别是在向前飞行中通常不需要产生升力并且能够相应地停止运行。集成在升降舵组中的、停止运行的叶轮则比安装在升降舵组上的、停止运行的螺旋桨具有在空气动力学方面有利得多的性能。
然而作为叶轮以外的替换方案或补充方案,原则上可以使用任何其它的、适于产生升力或附加升力的装置,例如喷气动力装置、涡轮喷气动力装置、冲压式喷气动力转置或火箭喷气动力装置。
优选地,第二驱动装置设置和/或设计为:当尾部位于成角度弯曲的位置中时,就是说当后部机身区段或者所述至少一个支承元件基本上垂直于飞机的纵轴线定向时,该第二驱动装置产生升力。特别是在纵轴线基本上竖直定向时,作为对优选在起动和/或着陆期间由第一驱动装置产生的升力的补充,通过第二驱动装置产生升力。由此可以通过特别可靠的和可控的方式提供起动或者受控着陆所需的升力。
此外优选的是:第二驱动装置设置和/或设计为:当后部机身区段或者所述至少一个支承元件在基本上垂直于飞机的特别是竖直定向的纵轴线的第二定向中延伸或者定向时,该第二驱动装置产生升力。
优选地,设置在升降舵组上的第二驱动装置设计为用于沿着至少一个方向产生驱动力(A),其中,第二驱动装置通过使后部机身区段与安装在其上的升降舵组一起围绕枢转轴线或者使所述至少一个支承元件与安装在其上的升降舵组一起围绕枢转轴线枢转、特别是仅仅通过所述枢转进入或者能够进入一位置和/或定向,在该位置和/或定向中可由和/或已由第二驱动装置产生的驱动力(A)的方向基本上对应于可由和/或已由第一驱动装置产生的升力的方向,使得既可以由或者由第一驱动装置也可以由或者由第二驱动装置产生升力(A1)。优选地,由第二驱动装置产生的驱动力(A)的方向基本上垂直于升降舵组或者水平尾翼延伸。
与在为了产生升力例如既使机翼也使升降舵组与安装在其上的螺旋桨一起或者使相应的螺旋桨单独相应地摆动的飞机中不同,在这种优选的实施形式中,只使尾部(后部机身区段或者支承元件)与位于其上的升降舵组连同优选牢固地设置在该升降舵组上的、特别是集成在该升降舵组中的第二驱动装置一起相对前部机身枢转。
因此能够在仅仅一个工作流程中、就是说,通过使前部机身区段相对后部机身区段或者支承元件枢转,或者通过使后部机身区段或支承元件相对前部机身区段枢转能够使飞机进入一组态中,在该组态中特别是在飞机的纵轴线基本上竖直定向时,能够由第一驱动装置(例如由前部的螺旋桨)以及第二驱动装置(例如叶轮或者推力矢量)产生升力。
替换地或补充地,第二驱动装置可以设置为,优选沿着所有任意方向产生驱动力。
优选地,由第二驱动装置产生的驱动力不仅能够在垂直飞行模式中对使飞机上升有贡献,而且还能够在向前飞行模式和/或垂直飞行模式中有利于换向和/或稳定方向。这样例如在向前飞行模式中和/或在第二悬浮模式中能够通过以下方式稳定飞机的沿着向前方向或者沿着竖直方向的飞行方向,即,例如通过产生相应指向的驱动力防止尾部向上和/或向下和/或向一侧“折断”。相应的内容适用于通过产生相应指向上方或者下方或者其中一侧的附加驱动力使飞机换向或者转向。
在另外的优选构造设计中,第一驱动装置和/或第二驱动装置具有推力矢量控制系统,通过该推力矢量控制系统能够改变或者已改变相应产生的推力或者升力的强度和/或方向。因此能够通过如下方式实现转向运动,即,例如有针对性地调节相应的驱动装置的排气射流的方向,例如通过喷气舵、喷嘴出口上的导流面或喷嘴本身的枢转。这特别是在垂直起飞时是有利的,在垂直起飞时飞机在竖直起飞中由垂直向下转向的推力承载。为了水平飞行或者向前飞行,使喷嘴枢转进入相应的位置,用以使飞机首先从竖直定向进入基本上水平的定向并且然后给该飞机向前飞行所需的推力,然后通过常规方式由机翼产生升力。
优选设置有控制装置,该控制装置设计为用于在飞机能够起飞和/或着陆的第一悬浮模式中如下地控制飞机,使得后部机身区段或者所述至少一个支承元件被枢转或者已经枢转到基本上垂直于飞机的纵轴线延伸的第二定向中,其中,飞机的纵轴线基本上沿竖直方向延伸,并且通过第一和第二驱动装置产生飞机的升力。
替换地或补充地,控制装置设计为用于在飞机能够起飞和/或着陆的第二悬浮模式中如下地控制飞机,使得后部机身区段或者所述至少一个支承元件被枢转或者已经枢转到基本上平行于飞机的纵轴线延伸的第一定向中,其中,飞机的纵轴线基本上沿着竖直的方向延伸,并且通过第一驱动装置产生飞机的升力。
替换地或补充地,控制装置设计为用于在飞机能够向前飞行的向前飞行模式中如下地控制飞机,使得后部机身区段或者所述至少一个支承元件被枢转或者已经枢转到基本上平行于飞机的纵轴线延伸的第一定向中,其中,飞机的纵轴线基本上沿着水平方向延伸,并且通过第一驱动装置产生飞机的推力而通过机翼和升降舵组产生飞机的升力。
优选地,控制装置还设计为用于将飞机通过如下方式从第二悬浮模式转入向前飞行模式,即,暂时激活第二驱动装置和/或激活升降舵组、特别是该升降舵组上的一个或多个控制面,使得飞机围绕横轴线旋转。
作为替换方案,飞机能够从飞机例如可以从地面升起的第一悬浮模式直接或者圆滑地转入向前飞行模式,而无需在此期间在上述第二悬浮模式中运行。在这种情况中,例如后部机身区段或者所述至少一个支承元件在起飞期间逐渐地从基本上垂直于飞机的纵轴线延伸的第二定向枢转到第一定向中,并且可选地还额外地用于使飞机通过如下方式围绕横轴线旋转,即,例如相应地激活第二驱动装置和/或升降舵组、特别是升降舵组上的一个或多个控制面。
附图说明
从下面结合附图的说明中获得本发明的另外的优点、特征和应用可能性。附图中:
图1是飞机的一实例的示意图;
图2是飞机的不同组态或者运行模式的示意图;
图3是飞机的示意图,其用于说明不同组态或者运行模式中质心的转移;
图4借助飞机的两个另外的实例示意性示出不同的组态或者运行模式;
图5是集成在升降舵组中的第二驱动装置的一实例的示意性横剖视图;
图6是枢转装置的一实例的示意性侧视图。
具体实施方式
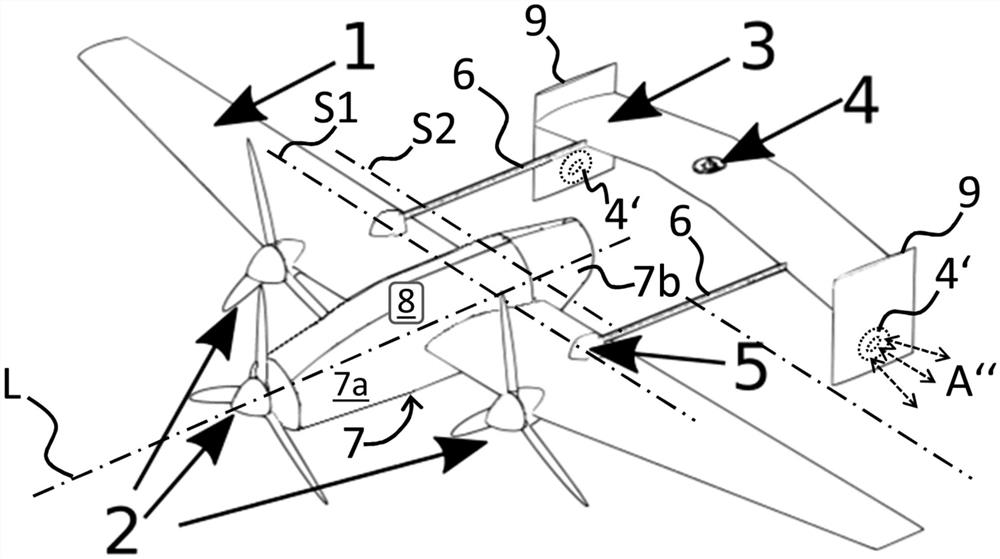
图1示出了飞机或者飞行器的一实例的示意图,其能够垂直起降并且下面也称为“总系统”。
总系统优选具有:机身7、机翼1、主驱动系统2、升降舵组3、辅助驱动系统4和枢转机构5。
在当前的实例中,结合本公开内容也称为第一驱动装置的主驱动系统2具有设置在机身7的前端部(机头)上的螺旋桨和设置在机翼1的左侧和右侧区段上的各一个螺旋桨。
用于稳定和控制围绕飞机的横轴线的飞行姿态并且由此还用于控制迎角和速度的升降舵组3在当前的实例中具有优选固定的和/或本身不可枢转的水平尾翼、然而也可以由固定的和/或本身不可枢转的水平尾翼和可运动的和/或本身可枢转的水平舵(未示出)组成,该水平舵优选可枢转地支承在水平尾翼上。替换地或补充地,升降舵组3可以具有本身可枢转的水平尾翼。升降舵组3在静态直线飞行中在尾部上施加向下指的力,用以对配重的头部重的扭矩进行平衡。
在当前的实例中,在升降舵组3上设置有两个侧翼9,这些侧翼也可以称为侧尾翼、安装在水平尾翼的侧端部上并且基本上垂直于水平尾翼定向。
结合本公开内容也称为第二驱动装置的辅助驱动系统4在所示出的实例中优选构造为叶轮,该叶轮集成在升降舵组3中或者集成在特别是固定的水平尾翼中。
在当前的实例中设置有两个特别是板条形的或管形的支承元件6,这些支承元件以前端部安装在位于机翼1上的枢转机构5上。升降舵组3安装在支承元件6的后端部上。因此,支承元件能够与位于其上的升降舵组3一起围绕穿过枢转机构5和/或基本上平行于飞机的横轴线和/或基本上垂直于飞机的纵轴线L延伸的枢转轴线S1枢转或者摆动。
结合本公开内容也称为枢转装置的枢转机构5优选设置为自锁的机构和/或具有自锁的传动装置,通过该机构或者传动装置,支承元件6例如能够借助电机驱动(未示出)围绕枢转轴线S1枢转,支承元件6的枢转通过从外部作用到升降舵组3和/或支承元件6上的力或者扭矩得到阻止或者至少变得困难。
在另外的图1未示出的变型实施方案中,升降舵组3可以代替安装在板条形或管形的支承元件6上地安装在机身7的后部机身区段7b上,该后部机身区段可以相对前部机身区段7a枢转。在此,后部机身区段7b优选比在图1示出的实例中长。此外,图1示意性示出的枢转机构5优选设置在机身7中或上并且尺寸相应地确定为和/或设置为,使后部机身区段7b、包括安装在其上的升降舵组3相对前部机身区段7a围绕基本上平行于横轴线和/或基本上垂直于飞机的纵轴线L延伸的枢转轴线S2的枢转或者摆动成为可能。
在两种变型方案中,枢转机构5能够实现总系统在不同的、可转换的组态之间的转换,所述组态优选具有至少两个不同的悬浮模式和一个空气动力学模式,其也称为向前飞行模式。
优选地,升降舵组3或者水平尾翼牢固地、特别是本身不可枢转地安装在支承元件6上或者后部机身区段7b上。然而作为替换方案,升降舵组3或者水平尾翼也能够可运动地、特别是本身可枢转地支承在支承元件6上或者后部机身区段7b上。在这种情况下,升降舵组3或者水平尾翼不仅能够与支承元件6或者后部机身区段7b一起围绕枢转轴线S1或者S2枢转,而且还能够额外地围绕在升降舵组3或者水平尾翼的区域上或者中延伸的、另外的枢转轴线(未示出)枢转,该另外的枢转轴线优选平行于支承元件6或者后部机身区段7b的枢转轴线S1或者S2延伸。
为了控制不同的运行模式或者组态中的飞机和运行模式或者组态之间的相应转变,设置有控制装置8,通过该控制装置对主驱动系统2和/或升降舵组3和/或辅助驱动系统4和/或枢转机构5进行相应的控制。这在下面借助实例详细地说明。
图2示出了飞机的不同组态或者运行模式的示意图。
飞机优选在升起和/或着陆时处于第一悬浮模式中,在该第一悬浮模式中,通过主驱动系统2和辅助驱动系统4产生升力,如在图2a中示出的那样。在所示出的实例中,两个支承元件6与安装在其上的升降舵组3一起向上翻转并且基本上垂直于飞机的基本上竖直定向的纵轴线L延伸。后部机身区段7b和/或升降舵组3、特别是设置在该升降舵组3的两个外侧端部上的侧翼9在此优选构成为,使得飞机例如在升起之前和/或在着陆之后能够以后部机身区段7b和升降舵组3站立在地面上。
飞机例如在升起之后和/或在着陆之前处于第二悬浮模式中,在该第二悬浮模式中,只通过主驱动系统2产生升力,如在图2b中示出的那样。
借助主驱动装置2、辅助驱动装置4和经由机翼1上的和/或升降舵组3上的控制面(未示出)能够实现悬浮模式中的稳定。后者位于主驱动装置2的气流中。
飞机优选在向前飞行时处于空气动力学模式中,在该空气动力学模式中,只通过主驱动装置2产生推力而通过机翼1和升降舵组3产生升力,如在图2c中示出的那样。借助机翼1上的和水平舵或者升降舵组3上的控制面能够进行对飞机的控制。
对于起动过程而言,总系统在第一悬浮模式中升起(图2a)。在升起之后,升降舵组3借助枢转机构5向下翻转,从而进入第二悬浮模式(图2b)。在向下翻转之后,总系统加速并转动进入空气动力学模式(图2c)。可以将水平舵或者升降舵组3上的控制面和/或辅助驱动装置4用于转动。
在空气动力学模式中(图2c)开始着陆过程。总系统首先转动进入第二悬浮模式中(图2b)。可以将水平舵或者升降舵组3上的控制面和/或辅助驱动装置4用于回转。在第二悬浮模式中,借助枢转机构5将升降舵组3向上翻转,用以到达第一悬浮模式(图2a)。总系统能够重新着陆。
与在为了垂直起飞例如使机翼和升降舵组与安装在其上的螺旋桨一起和/或使可枢转地支承在机翼上的螺旋桨分别摆动90°的飞机中不同,在当前的飞机中优选只使尾部,就是说后部机身区段7b或者支承元件6与位于其上的升降舵组3和固定设置在升降舵组3上的和/或集成在升降舵组中的第二驱动装置4一起相对前部机身7a枢转。根据输出结构,这反过来也适用,就是说,使前部机身区段7a或者机身7相对尾部、即后部机身区段7b或者支承元件6和位于其上的升降舵组3枢转。
由此可以使飞机在仅仅一个作业过程或者枢转过程中(在该作业或者枢转过程中前部机身区段7a或者机身7相对后部机身区段7b或者支承元件6和/或后部机身区段7b或者支承元件6相对前部机身区段7a或者机身7枢转优选+90°)进入一组态,在该组态中既能够由第一驱动装置2(例如螺旋桨)、也能够由第二驱动装置4(例如叶轮、推力矢量)产生升力(参见图2a中的箭头A1)。
优选地,飞机是可以如下的控制和/或设置,即,飞机的纵轴线L在后部机身区段7b或者支承元件6和/或前部机身区段7a或者机身7枢转进入图2a示出的组态中之后优选立刻基本上沿着竖直方向延伸。后部机身区段7b或者支承元件6然后优选基本上沿着水平方向延伸。
反之,可以在仅仅一个作业或者枢转过程中(在该作业或者枢转过程中后部机身区段7b或者支承元件6相对前部机身区段7a沿着相反方向枢转优选-90°)使飞机从图2a示出的组态进入一组态,在该组态中,例如在垂直起飞之后只由第一驱动装置2(例如螺旋桨)产生升力(参见图2b中的箭头A2)。
为了进一步改善的第一和第二悬浮模式,可以如下地在总系统上进行改进:
(1)主驱动系统2的和/或辅助驱动系统4的推力矢量控制系统。推力矢量控制系统的出众之处在于:不同的驱动系统2或4所产生的升力矢量的大小和方向可以得到改变。这样的改变是用于控制总系统的有效方法。
(2)在空气动力学模式中将气动中心并且同时将质心向着升降舵组3的尾部的方向转移(沿着图3a中的箭头方向)。通过这个转移,总系统的质心在两种悬浮模式中向下(沿着图3b和3c中的箭头方向)移动。因此在两种悬浮模式中实现了总系统的更加稳定的基本状态。这既能够静态地、例如通过飞机的相应结构,也能够动态地例如在飞行期间或者在各运行模式或者组态之间的转变期间实现。为了实现质心的动态转移、例如位于机身7中或上的质量块能够借助适宜的滑移机构沿着或者平行于纵轴线L的方向可滑移地支承。该可滑移地支承的质量块例如可以通过专门为此目的设置的、额外的质量体和/或通过可滑移地支承的货物获得。然而替换地或补充地,可滑移的质量块也可以通过飞机的已经存在的组成部分、例如位于机身7中的蓄电池获得。滑移机构可以具有例如滑座或带子(借助该滑座或带子能够使质量块滑移或转移)和用于驱动滑座或带子的电机、例如步进电机。尽管在图1至3示范性示出的飞机中升降舵组3安装在可枢转地支承在机翼1上的支承元件6上,上述说明的实施形式也相应地适用于升降舵组3安装在可枢转的后部机身区段7b或前部机身区段7a上的变型实施方案。如果升降舵组3安装在前部机身区段7a上,那么这个升降舵组根据结构、沿着飞行方向观察甚至可以设置在机翼1前面。下面借助实例对这种另外的变型实施方案进行详细说明。
图4借助飞机的两个另外的实例示出了不同的组态或者运行模式的大幅简化的侧视图。
在图4a至4c示出的飞机实例中,后部机身区段7b借助枢转装置5可枢转地支承在前部机身区段7a上。机翼1和例如形式为螺旋桨的主驱动系统2安装在前部机身区段7a上。不仅升降舵组3、而且辅助驱动装置4安装在后部机身区段7b上并且能够与该后部机身区段共同相对前部机身区段7a枢转。枢转轴线在当前的实例中基本上垂直于绘图平面或者飞机的纵轴线L延伸。与图2a至2c示出的实例类似,图4a示出了第一悬浮模式,飞机优选在升起和/或着陆时处于该第一悬浮模式中,图4b示出了第二悬浮模式,飞机优选在升起之后和/或在着陆之前处于该第二悬浮模式中,而图4c则示出了空气动力学模式,飞机优选在向前飞行期间处于该空气动力学模式中。结合图2a至2c的上述说明相应地适用于图4a至4c。优选地如在图4a中示出的那样,后部机身区段7b构成为、特别是尺寸确定为和/或成形为:飞机在第一悬浮模式中、例如在升起之前和/或在着陆之后能够以后部机身区段7b站立在地面上。
在图4d至4f示出的飞机实例中,升降舵组3和辅助驱动装置4安装在至少一个支承元件6的端部上,所述支承元件以其另一端部借助枢转装置5可枢转地支承在机身7的后部区域上。在这种情况下,枢转装置5构成为和/或所述至少一个支承元件6的长度选定为:使得所述至少一个支承元件6可以朝着机身7并且在此优选向着机身7的纵平面或者纵轴线L枢转(参见弯曲的箭头)。升降舵组3和辅助驱动装置4通过这种方式沿着飞行方向观察可以定位在机身7前和/或主驱动装置2前和/或机翼1前,如在图4e和4f中示出的那样。结合图2a至2c的上述说明相应地适用于图4d至4f。
所说明的飞机方案能够用于载人的和无人驾驶的系统。
图5示出了集成在升降舵组3中的、构造为叶轮的第二驱动装置4的实例的示意性横剖视图。
在升降舵组3的水平尾翼3a中(在视图中只能看到该水平尾翼或者升降舵组的局部)设置有通孔,环形或管形的壳体10集成在该通孔中。围绕螺旋桨轴线11可旋转地支承的螺旋桨12设置在该壳体10中。螺旋桨12安装在(出于清楚原因未示出的)驱动轴上,该驱动轴可以由电机(未示出)驱动旋转。
壳体10优选具有上部壳体区域13,该上部壳体区域的直径或者横截面从壳体10的其中设置有螺旋桨12的区域出发向着水平尾翼3a的上侧优选连续地增加并且优选转入水平尾翼3a的上侧中和/或与这个上侧对齐。替换地或补充地,壳体10可以具有下部壳体区段14,该下部壳体区段超过水平尾翼3a的下侧伸出。
在图5中通过虚线画出的箭头示出的、通过螺旋桨12的转动产生的、穿过壳体10的气流产生驱动力A,该驱动力可以用于操纵飞机和/或特别是在第一悬浮模式中作为补充的升力(就是说,作为对由第一驱动装置2产生的升力的补充)辅助飞机从地面垂直起飞或者升起,如前面结合图2a已经详细说明的那样。
构造为叶轮的第二驱动装置4优选牢固地设置在升降舵组3上或者水平尾翼3b上,就是说,叶轮本身优选是不可枢转的,因而驱动力A的方向针对升降舵组3和/或水平尾翼3a是固定的或者不可改变的。
在一种替换的实施形式中,构造为叶轮的第二驱动装置4尽管同样可以固定设置在升降舵组3上或者水平尾翼3b上使得叶轮本身不可枢转,然而在壳体10的下端部的区域中和/或下部壳体区段14的区域中可以额外地设置空气导流装置15,通过该空气导流装置可以改变相应产生的驱动力A的强度和/或方向。
空气导流装置15在当前实例中具有在远离叶轮的方向上变细的管子,该管子可以围绕垂直于绘图平面延伸的枢转轴线S枢转并且在此能够使垂直于水平尾翼3b从叶轮中出来的气流转向(通过点划线的箭头示出)并且能够产生沿着其方向相应改变的驱动力A’。
结合本公开内容,空气导流装置15的上述作用原理也称为推力矢量控制。
然而作为可枢转的和优选构造为锥形的或者变细的管子的空气导流装置15以外的替换方案或补充方案,也可以通过其它措施实现推力矢量控制,在这些其它措施中,有针对性地调整第二驱动装置2的排气射流或者空气射流,例如通过喷嘴出口或者叶轮出口上的喷气舵、导流面或者通过使喷嘴或叶轮本身枢转。
尽管在图5的视图中由特别是形式为叶轮的第二驱动装置4产生的驱动力A、A’指向上方,然而第二驱动装置4也可以设计为用于产生指向相反方向的、特别是指向下方的驱动力,这些驱动力与示范性画出的驱动力A和A’的方向相反。通过使构造为叶轮的第二驱动装置的螺旋桨12的转动方向反转能够轻易地实现这些驱动力。
原则上,第二驱动装置4可以设计为用于产生沿着任意方向的驱动力。
优选地,由第二驱动装置4产生的驱动力不仅能够对飞机的升力有贡献、而且还能够在向前飞行模式和/或垂直飞行模式中有助于换向和/或稳定方向。这样例如在图2b示出的第二悬浮模式中能够通过以下方式稳定飞机沿着竖直方向的飞行方向,即,例如通过产生在绘图平面中向右指和/或向左指的驱动力来防止尾部向左或者向右“折断”。
优选的地,特别是如上所述的构造为叶轮的第二驱动装置4可选地与空气导流装置15一起也可以集成在一个或两个侧翼9或者侧尾翼中。这借助图1示出的飞机实例示出,在该实例中可选地,两个构造为叶轮的第二驱动装置4’集成在两个侧翼9中。驱动装置4’构造为用于产生驱动力A”,这些驱动力垂直于飞机的纵轴线L定向和/或定向为与该飞机的纵轴线成可调节的或者可预设的角度(这通过虚线画出的双箭头示出)并且优选在向前飞行模式和/或垂直飞行模式中用于换向和/或稳定方向。因此例如在图2a、2b和2c示出的垂直飞行模式或者向前飞行模式中通过如下方式稳定飞机的飞行方向,即,例如通过产生相应的、侧向指向的驱动力防止尾部侧向“折断”。
图6示出了枢转装置5的一种实例的示意性侧视图,各一个支承元件6经由该枢转装置可枢转地支承在飞机的机身7上和/或机翼1上(参见图1)。
枢转装置5具有特别是形式为电动机的枢转驱动单元20和枢转传动装置,该枢转传动装置在当前实例中具有可由枢转驱动单元20驱动围绕转动轴线R转动的驱动轴21,特别是形式为蜗杆的螺旋形的传动元件22安装在该驱动轴上。
此外设置有齿轮23、特别是伞齿轮或蜗轮,该齿轮围绕基本上垂直于驱动轴22的转动轴线R和优选沿着枢转轴线S1(参见图1)延伸的齿轮轴线Z可旋转地支承并且与传动元件22或者蜗杆的螺纹啮合。
如果通过由电机20驱动的驱动轴21使传动元件22围绕转动轴线R转动,那么使齿轮23与紧固在其上的支承元件6一起按照转动方向围绕齿轮轴线Z枢转,这通过两个双箭头示出。
优选地,围绕转动轴线R的转动运动与齿轮23围绕齿轮轴线Z的旋转运动或者枢转运动的传动比选择为:使得枢转传动装置是自锁的,就是说,齿轮23和位于其上的支承元件6优选只通过驱动轴21的转动才能够枢转,然而反之驱动轴21通过通常、就是说特别是在飞机运行中作用到齿轮23和/或支承元件6上的力不能或者只能在预设的公差内转动。
因此能够使支承元件6和位于其上的升降舵组3(参见图1)通过简单而有力的方式相对机身7或者机翼1枢转并且另外可靠地保持在相应占据的枢转位置中。
尽管在图6示出的实例中借助枢转装置5使支承元件6枢转,然而枢转装置5当然也可以设计为用于使后部机身区段7b与安装在其上的升降舵组3一起相对前部机身区段7a枢转。
尽管在图6示出的实例中枢转传动装置优选构造为蜗轮蜗杆传动装置,然而也可以通过其它方式实现该枢转传动装置。
例如,驱动轴21可以构造为螺杆,螺母串接在该代替蜗杆22的螺杆上,该螺母与围绕轴线Z可枢转地支承的支承元件6联接。若通过电机21使螺杆围绕转动轴线R转动,那么螺母平行于回转轴线R滑移,这导致与其联接的支承元件6旋转。在这种实施方式中也可以如下地选择传动比,即,枢转传动装置是自锁的。
- 高空飞机、飞机单元以及用于运行飞机单元的方法
- 飞机和用于运行飞机的方法