基于双目视觉和编码结构光相结合的穴位定位系统及方法
文献发布时间:2023-06-19 10:16:30
技术领域
本发明属于医学技术应用领域,特别涉及到一种基于双目视觉和编码结构光相结合的穴位定位方法。
背景技术
传统中医里,针灸疗法历史悠久,疗效独特。但这种治疗方式对从业者经验和手法技术要求较高,具体表现在穴位定位的准确程度上。医书上给出的基于身体的穴位定位方法,主要以某一个器官或身体某个特征部位为基准,来寻找相对的穴位位置。现阶段,国内外自动取穴的相关技术还不成熟,大多数处于研究阶段,临床应用的实例几乎没有。要想精确的确定穴位的位置,需要经过多年的临床实践,而缺少临床经验的医生来讲,准确的定位穴位具有较大的难度。因此,急需开发一种自动进行穴位定位的定位仪。
为解决这一问题,开发出一种双目视觉和结构光相结合的穴位定位方法,对人体背部模型进行三维重建,将摄像头拍摄的二维坐标还原成世界坐标系下的三维坐标,并从图像中分割出人体背部模型,结合中医找到人体背部相应的穴位信息。
发明内容
本发明的目的是针对现有技术的不足,提供一种双目视觉和结构光相结合的穴位定位系统及方法,对人体背部模型进行三维重建,将摄像头拍摄的二维坐标还原成世界坐标系下的三维坐标,并从图像中分割出人体背部模型,结合中医找到人体背部相应的穴位信息。
为了实现上述目的,本发明的技术方案如下:
基于双目视觉和编码结构光相结合的穴位定位系统,包括两个相同相机、结构光发生器、支撑架、标定板、主控器;两个相机、结构光发生器位于支撑架上方,且结构光发生器位于两个相机之前;
所述结构光发生器用于在人体背部投射结构光;其中结构光的图案是带格雷码编码的条纹图案;
所述相机用于捕捉投射有结构光图案的人体背部图像;
所述标定板用于相机标定;
所述主控器用于控制结构光发生器的开启以及对结构光发生器编码设定结构光图案,接收相机传送的图案信息,并将其传送至计算机进行数据分析。
一种基于双目视觉和编码结构光相结合的穴位定位方法,包括以下步骤:
步骤(1)、相机标定:
采用张正友标定法,通过调整标定板或相机的方向进行标定。
上述标定过程中相机提取角点作为特征点,应用最小二乘法估算实际存在径向畸变下的畸变参数,最后应用极大似然法优化,提升精度,从而得到旋转和平移参数、相机畸变参数。
步骤(2)、开启结构光发生器,并使得结构光图案落在人体背部;
步骤(3)、两个相机获取左右两幅投射有结构光图案的人体背部图像;
步骤(4)、图像立体校正
通过现有技术将左右两幅图像立体校正;所述的立体校正是将两幅不严格共面对齐的两幅图像校准成共面且行对齐。
步骤(5)、获取匹配点
5-1格雷码值
向人体背部投射格雷码图案结构光进行编解码,使两个相机采集到的每个像素点获得格雷码值。
上述的解码是采用向人体背部投射已编码的原始格雷码图案的结构光,然后将格雷码反码图案的结构光再次投射到人体背部,最终通过上述两幅图案进行解码。
所述格雷码反码图案为原始格雷码图案取反得到。
在解码阶段,采取简易的双阈值分割方法:设I(x,y)为图像在点(x,y)处的灰度值,I
5-2相位值
投射N幅图案的结构光在人体背部,每幅图案对应一个相位值,相位周期为N。对每一幅相位图提取黑白条纹的边界,如果在第n张相位图中像素点(x,y)提取到边界,即像素点(x,y)对应的相位值为n,n≤N。
5-3搜索匹配点
通过遍历搜寻法遍历右图像同一行的像素点,寻找左图像P(x,y)在右图像对应格雷码值和相位值相同的点,该点即为匹配点。
结构光和普通双目视觉的差别:对于纹理特征较少的场景,双目视觉重建的效果并不好。投射结构光,增加图像的纹理性,增强抗环境干扰能力,可靠性更强,深度图质量有更大提升空间。
步骤(6)、获取视差图和深度图:
6-1假设左图中点P
所述的有效像素点为具有右图匹配点的像素点。
6-2对视差图中无效像素点,采用中值滤波的方式进行消除。
所述的无效像素点为不具有匹配点的像素点。
6-3通过三角测量公式将视差图转化为深度图,具体是:
a)在左图像上建立像素坐标系O
b)以相机光轴与平面的交点为原点,建立图像坐标系O-XY。
c)以相机光心为原点,相机光轴为Z轴,x轴、y轴与图像坐标系X轴、Y轴相同,建立相机坐标系。
d)构建像素坐标系和图像坐标系的关系为:
其中u,v分别表示像素坐标系的u轴,v轴;(u
e)通过投影透视关系变换构建相机坐标系与图像坐标系的关系如下:
其中f表示左相机的焦距。
f)相机坐标系和世界坐标系的关系可以通过相机外参确定的旋转参数R和平移参数T来描述,关系如下:
其中(X
g)通过以上四个坐标系转换可以得到单相机成像时某点的世界坐标系和像素坐标系的转换关系如下式:
其中f
h)根据步骤(5)获得的匹配点信息,结合公式(4)获得左图像所有有效像素点在世界坐标系的三维坐标值。
i)根据视差原理进行人体背部的三维测量,空间点的三维坐标为:
其中,B为双目相机基线距离,f为相机焦距,(x
步骤(7)、获取穴位位置信息
7-1获取背部图像轮廓图
对左图像进行预处理,然后利用canny算子进行边缘检测,获取背部图像轮廓图。
所述预处理是利用分水岭算法对左图像进行分割,分水岭算法将空间上临近并且灰度值相近的区域划分为一个区域,灰度值一样,从而进行轮廓分割提取。
7-2基于背部图像轮廓图找寻背部两个明显特征点,得到两个特征点的二维像素坐标;明显特征点为中脊线上最宽和最窄两点位置处。
7-3基于两个特征点的像素坐标,结合公式(4),进一步得到特征点的三维坐标。
7-4根据特征点的三维坐标,结合中医骨度分寸法,得到穴位位置信息。
本发明的有益效果是:
1)本发明采用两个相机和结构光重构背部的三维信息,进一步提高定位精准度。
2)采用本发明自动检测定位身体特定穴位,例如头部,背部穴位的医学仪器,用以辅助临床医生准确定位穴位,降低医生的主观误判概率。
3)本发明将编码结构光和双目视觉相结合,有效的解决了室内白墙和无纹理物体的难题,增强抗环境干扰能力,可靠性更强,深度图质量有更大提升空间。
附图说明
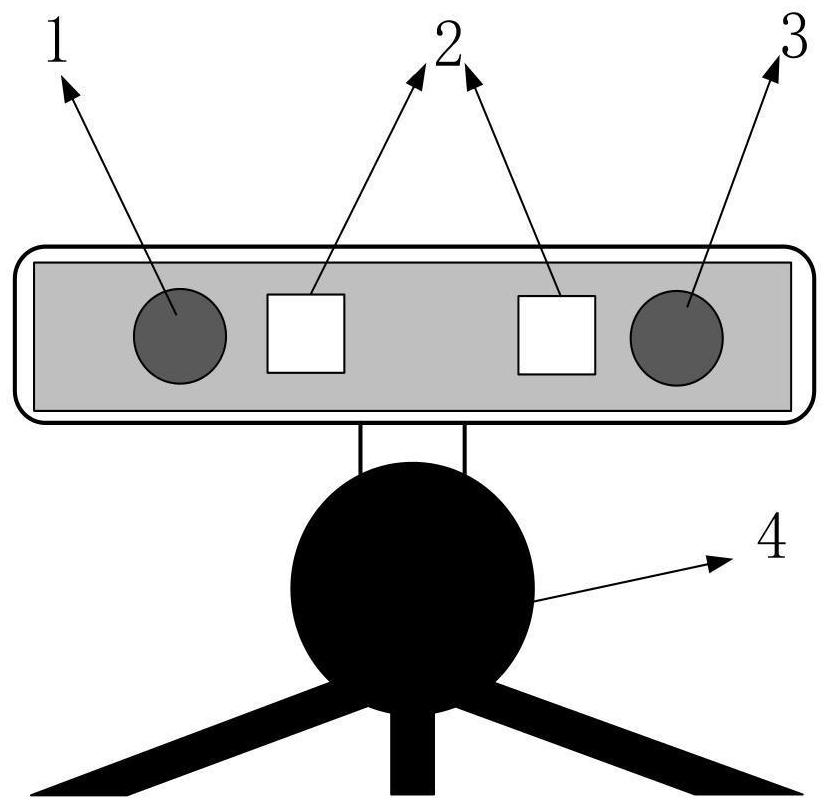
图1为本发明的结构示意图;
图中标记:1.左相机,2结构光发生器,3右相机,4支撑架;
图2为带格雷码编码的条纹图案;
图3(a)为左图像,图3(b)为背部图像轮廓图。
具体实施方式
下面结合具体实施例对本发明做进一步的分析。
如图1基于双目视觉和编码结构光相结合的穴位定位系统,包括两个相同参数的左相机1、右相机3,结构光发生器2,支撑架4,标定板,主控器;两个相机、结构光发生器位于支撑架上方,且结构光发生器位于两个相机之前;
所述结构光发生器用于在人体背部投射结构光;其中结构光的图案是如图2带格雷码编码的条纹图案;
所述相机用于捕捉投射有结构光图案的人体背部图像;
所述标定板用于相机标定;
所述主控器用于控制结构光发生器的开启以及对结构光发生器编码设定结构光图案,接收相机传送的图案信息,并将其传送至计算机进行数据分析。
一种基于双目视觉和编码结构光相结合的穴位定位方法,包括以下步骤:
步骤(1)、相机标定:
采用张正友标定法,通过调整标定板或相机的方向进行标定。
上述标定过程中相机提取角点作为特征点,应用最小二乘法估算实际存在径向畸变下的畸变参数,最后应用极大似然法优化,提升精度,从而得到旋转和平移参数、相机畸变参数。
步骤(2)、开启结构光发生器,并使得结构光图案落在人体背部;
步骤(3)、两个相机获取左右两幅投射有结构光图案的人体背部图像;
步骤(4)、图像立体校正
通过现有技术将左右两幅图像立体校正;所述的立体校正是将两幅不严格共面对齐的两幅图像校准成共面且行对齐。
步骤(5)、获取匹配点
5-1格雷码值
向人体背部投射格雷码图案结构光进行编解码,使两个相机采集到的每个像素点获得格雷码值。
上述的解码是采用向人体背部投射已编码的原始格雷码图案的结构光,然后将原始格雷码图案取反即是格雷码反码图案,将格雷码反码图案的结构光再次投射到人体背部,最终通过上述两幅图案进行解码。
在解码阶段,采取简易的双阈值分割方法:设I(x,y)为图像在点(x,y)处的灰度值,I
5-2相位值
投射N幅图案的结构光在人体背部,每幅图案对应一个相位值,相位周期为N。对每一幅相位图提取黑白条纹的边界,如果在第n张相位图中像素点(x,y)提取到边界,即像素点(x,y)对应的相位值为n,n≤N。
5-3搜索匹配点
通过遍历搜寻法遍历右图像同一行的像素点,寻找左图像P(x,y)在右图像对应格雷码值和相位值相同的点,该点即为匹配点。
结构光和普通双目视觉的差别:对于纹理特征较少的场景,双目视觉重建的效果并不好。投射结构光,增加图像的纹理性,增强抗环境干扰能力,可靠性更强,深度图质量有更大提升空间。
步骤(6)、获取视差图和深度图:
6-1假设左图中点P
所述的有效像素点为具有右图匹配点的像素点。
6-2对视差图中无效像素点,采用中值滤波的方式进行消除。
所述的无效像素点为不具有匹配点的像素点。
6-3通过三角测量公式将视差图转化为深度图,具体是:
a)在左图像上建立像素坐标系O
b)以相机光轴与平面的交点为原点,建立图像坐标系O-XY。
c)以相机光心为原点,相机光轴为Z轴,x轴、y轴与图像坐标系X轴、Y轴相同,建立相机坐标系。
d)构建像素坐标系和图像坐标系的关系为:
其中u,v分别表示像素坐标系的u轴,v轴;(u
e)通过投影透视关系变换构建相机坐标系与图像坐标系的关系如下:
其中f表示左相机的焦距。
f)相机坐标系和世界坐标系的关系可以通过相机外参确定的旋转参数R和平移参数T来描述,关系如下:
其中(X
g)通过以上四个坐标系转换可以得到单相机成像时某点的世界坐标系和像素坐标系的转换关系如下式:
其中f
h)根据步骤(5)获得的匹配点信息,结合公式(4)获得左图像所有有效像素点在世界坐标系的三维坐标值。
i)根据视差原理进行人体背部的三维测量,空间点的三维坐标为:
其中,B为双目相机基线距离,f为相机焦距,(x
步骤(7)、获取穴位位置信息
7-1获取背部图像轮廓图
对图3(a)左图像进行预处理,然后利用canny算子进行边缘检测,获取背部图像轮廓图图3(b)。
所述预处理是利用分水岭算法对左图像进行分割,分水岭算法将空间上临近并且灰度值相近的区域划分为一个区域,灰度值一样,从而进行轮廓分割提取。
7-2基于背部图像轮廓图找寻背部两个明显特征点,得到两个特征点的二维像素坐标;明显特征点为中脊线上最宽和最窄两点位置处。
7-3基于两个特征点的像素坐标,结合公式(4),进一步得到特征点的三维坐标。7-4根据特征点的三维坐标,结合中医骨度分寸法,得到穴位位置信息。
上述实施例并非是对于本发明的限制,本发明并非仅限于上述实施例,只要符合本发明要求,均属于本发明的保护范围。
- 基于双目视觉和编码结构光相结合的穴位定位系统及方法
- 一种基于双目视觉结构光的复杂表面形状检测方法