一种重载智能运输车智能制动方法及系统
文献发布时间:2023-06-19 10:21:15
技术领域
本发明属于车辆制动控制领域,更具体地,涉及一种重载智能运输车智能制动方法及系统。
背景技术
随着新能源汽车和自动驾驶技术的不断发展,汽车底盘制动系统电控技术也不断发展。特别是ADAS,AEB等技术不断在汽车上实用,对制动系统技术的要求也越来越高。需要车辆不仅具有人工制动控制,同时也需要具有自动制动控制功能。EHB电子液压制动系统不同于传统的真空助力制动系统,可以通过电子控制液压系统主缸和轮缸的制动压力,实现主动制动功能。目前,在传统人工驾驶重载汽车上,所使用的气压制动系统,虽然工作稳定可靠,但是控制精度低,依靠人工经验把握制动力度;另外,制动气源上依靠燃油发动机气泵,无法在新能源汽车上直接应用;最后,在车辆出现紧急故障情况下,仍旧需要人工介入才能紧急制动,智能化程度不高,应用到无人驾驶的重载智能运输车上会有潜在的安全隐患。
中国专利CN108162941B提出了一种EHB电液制动系统制动控制方法,其制动方式控制逻辑判断模块根据车辆工作状态判断当前制动方式是主动制动还是人工制动,目标压力跟随闭环控制器根据不同的制动方式分别进行液压系统建压控制,实现车辆制动系统轮缸制动力的输出。然而该专利并没有将驱动电机的回馈力矩纳入考虑,使得在进行制动分配时,实际调整量与理论的调整量偏差较大。
基于上述缺陷和不足,本领域亟需提出一种重载智能运输车智能制动方法,构建可靠性好、响应速度快、制动能力强的智能制动方法,以解决现有技术中制动智能化程度不高,应用到无人驾驶的重载智能运输车上会有潜在的安全隐患的问题。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供了一种重载智能运输车智能制动方法及系统,其中结合重载智能运输车自身的特征及其运输过程中的制动工艺特点,相应的对重载智能运输车的智能制动方法进行研究和设计,根据运输车工作状态采取相应的制动方式,并在行车制动控制过程中,将实时速度以及驱动电机的回馈力矩作为PID的控制量,从而调控前后制动气室的压力,保证制动合理的制动分配,同时,使得运输车在行车制动过程中以恒定的目标减速度进行驻车。相应的可有效解决重载智能运输车制动距离过长,以及故障情况下的如何紧急制动问题,同时还具备制动时的能量回馈功能,因而尤其适用于重载智能运输车及新能源汽车线控底盘制动的应用场合。
为实现上述目的,按照本发明的一个方面,提出了一种重载智能运输车智能制动方法,包括以下步骤:
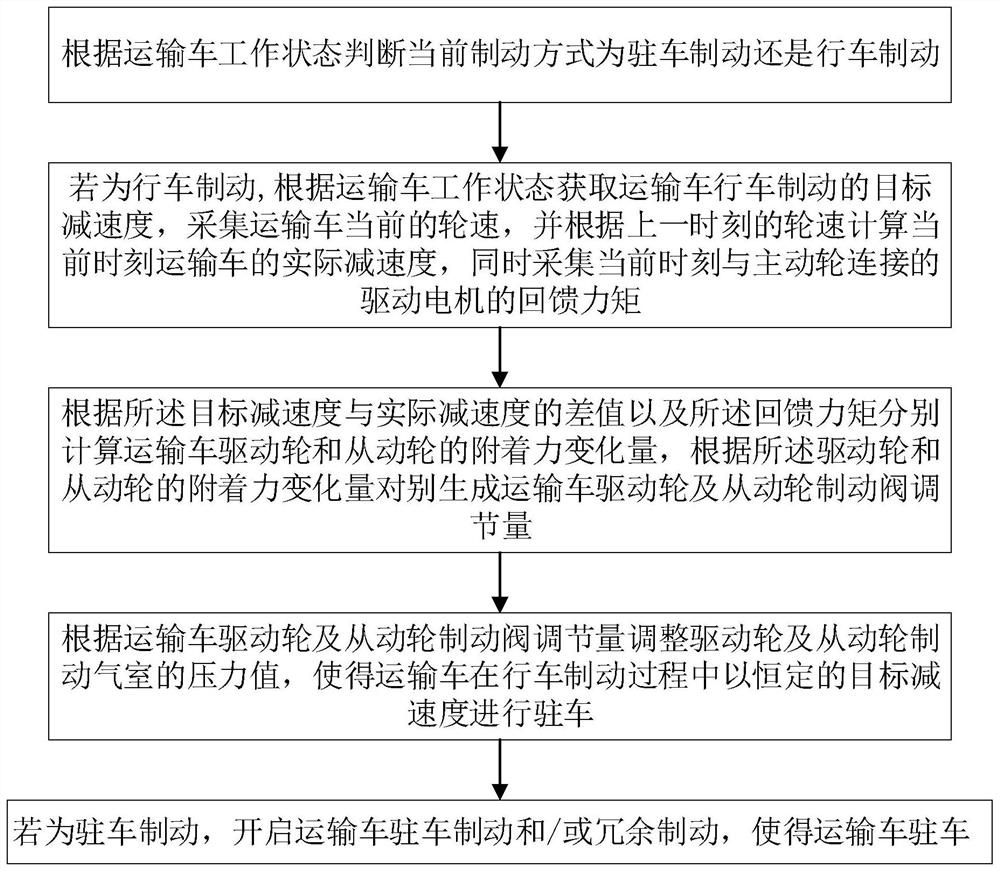
S1根据运输车工作状态判断当前制动方式为驻车制动还是行车制动,若为行车制动,则重复执行步骤S2至S4,直至驻车,若为驻车制动,则执行步骤S5;
S2根据运输车工作状态获取运输车行车制动的目标减速度,采集运输车当前的轮速,并根据上一时刻的轮速计算当前时刻运输车的实际减速度,同时采集当前时刻与主动轮连接的驱动电机的回馈力矩;
S3根据所述目标减速度与实际减速度的差值以及所述回馈力矩分别计算运输车驱动轮和从动轮的附着力变化量,根据所述驱动轮和从动轮的附着力变化量分别生成运输车驱动轮及从动轮制动阀调节量;
S4根据运输车驱动轮及从动轮制动阀调节量调整驱动轮及从动轮制动气室的压力值,使得运输车在行车制动过程中以恒定的目标减速度进行驻车;
S5开启运输车驻车制动和/或冗余制动,使得运输车驻车。
作为进一步优选的,步骤S2中,当运输车收到行车制动请求时,采取驱动轮和从动轮同时抱死的方式进行制动,在制动过程中,驱动轮和从动轮的轴向载荷计算模型为:
式中,F
作为进一步优选的,步骤S3中,在生成运输车驱动轮及从动轮制动阀调节量之前,还需计算上一时刻及当前时刻运输车驱动轮及从动轮的附着力,其中,所述驱动轮的附着力的计算模型为:
所述从动轮的附着力的计算模型为:
式中,F
作为进一步优选的,步骤S3中,根据所述驱动轮和从动轮的附着力变化量对别生成运输车驱动轮及从动轮制动阀调节量具体包括以下步骤:
根据所述驱动轮和从动轮的附着力变化量以及上一时刻所述驱动轮和从动轮的附着力计算当前时刻所述驱动轮和从动轮的附着力;
根据当前时刻所述驱动轮和从动轮的附着力,通过查表的方式匹配当前时刻所述驱动轮和从动轮的附着力所对应的行车制动的气压压力值,根据该压力值与上一时刻行车制动的气压压力值计算运输车驱动轮及从动轮制动阀调节量。
作为进一步优选的,步骤S3中,与主动轮连接的驱动电机还用于将所述主动轮在行车制动过程中的转动机械能转化为电能,并将该电能存储在电池中。
作为进一步优选的,步骤S1中,需先进行车辆故障检测,同时,将车辆故障根据运输车自身功能状况和环境障碍状况进行分类,若为运输车自身功能状况,则启动驻车制动,若为环境障碍状况,则根据运输车允许的制动距离判断当前制动方式为驻车制动还是行车制动。
按照本发明的另一个方面,还提出了一种重载智能运输车智能制动系统,包括主控制模块、整车控制器VCU、车速传感器、EBS制动控制器、驻车制动模块、冗余制动模块、与主动轮连接的驱动电机以及驱动电机回馈力矩采集器,其中,
所述主控制模块用于根据运输车工作状态判断当前制动方式为驻车制动还是行车制动,并将前制动方式发送给所述整车控制器VCU;
所述驻车制动模块用于接收所述整车控制器VCU发送的驻车制动指令,并根据该驻车制动指令执行驻车制动动作;
所述冗余制动模块用于接收所述整车控制器VCU发送的冗余制动指令,并根据该冗余制动指令执行冗余制动动作;
所述EBS制动控制器用于接收所述整车控制器VCU发送的行车制动指令,并根据该行车制动指令执行行车制动动作;
所述车速传感器用于实时采集所述主动轮与从动轮的车速;
所述驱动电机回馈力矩采集器用于实时采集所述驱动电机的电机回馈力矩;
所述整车控制器VCU根据所述主控制模块发送的运输车行车制动的目标减速度、所述车速传感器采集的所述主动轮与从动轮的车速以及驱动电机回馈力矩采集器采集的电机回馈力矩分别计算运输车驱动轮和从动轮的附着力变化量,并根据所述驱动轮和从动轮的附着力变化量分别生成运输车驱动轮及从动轮制动阀调节量,以此来调整驱动轮及从动轮制动气室的压力值,使得运输车在行车制动过程中以恒定的目标减速度进行驻车。
作为进一步优选的,所述驻车制动模块包括驻车制动电磁阀,该驻车制动电磁阀与所述整车控制器VCU电性连接,并在所述整车控制器VCU的控制作用下执行驻车制动动作;
所述冗余制动模块包括冗余制动电磁阀,该冗余制动电磁阀与所述整车控制器VCU电性连接,并在所述整车控制器VCU的控制作用下执行冗余制动动作。
作为进一步优选的,所述驱动轮的附着力的计算模型为:
所述从动轮的附着力的计算模型为:
式中,F
作为进一步优选的,所述驱动电机的动力输出轴与驱动轮的驱动桥连接,用于将所述主动轮在行车制动过程中的转动机械能转化为电能,并将该电能存储在电池中。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:
1.本发明根据运输车工作状态采取相应的制动方式,并在行车制动控制过程中,将实时速度以及驱动电机的回馈力矩作为PID的控制量,从而调控前后制动气室的压力,保证制动合理的制动分配,同时,使得运输车在行车制动过程中以恒定的目标减速度进行驻车。相应的可有效解决重载智能运输车制动距离过长,以及故障情况下的如何紧急制动问题,同时还具备制动时的能量回馈功能。本发明具备智能化制动功能,不仅适用于传统的人工驾驶车辆底盘,还可以适用于无人化的车辆底盘。
2.本发明通过对行车制动、驻车制动及冗余制动的集成协调控制,一方面确保了重载智能运输车在制动过程中的安全,另一方面还具备电机能量回馈的功能,不仅有较高的完全性,还对节能减排具有辅助意义。
3.本发明通过对车辆状态的监控,结合对制动功能的联动,能降低制动反应时间,缩短最终的制动距离,进一步提高制动的安全性。
4.本发明通过对轮速和电机回馈力矩的采集,并采用基于PID的控制算法得到期望的减速度,实现制动过程中的恒减速度控制,能提高车辆制动的平顺性。
附图说明
图1是本发明优选实施例涉及的一种重载智能运输车智能制动方法的流程图;
图2是本发明优选实施例涉及的一种重载智能运输车智能制动方法的控制结构示意图;
图3是本发明实施例涉及的一种重载智能运输车智能制动方法中制动时的受力分析图;
图4是是本发明实施例涉及的一种重载智能运输车智能制动方法中涉及的行车制动调控流程图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
如图1和图2所示,本发明实施例提供的一种重载智能运输车智能制动方法,通过对行车制动、驻车制动及冗余制动的集成协调控制,根据运输车工作状态采取相应的制动方式,并在行车制动控制过程中,将实时速度以及驱动电机的回馈力矩作为PID的控制量,从而调控前后制动气室的压力,保证制动合理的制动分配,同时,使得运输车在行车制动过程中以恒定的目标减速度进行驻车,一方面确保了重载智能运输车在制动过程中的安全,另一方面还具备电机能量回馈的功能,不仅有较高的完全性,还对节能减排具有辅助意义。包括:采集重载智能运输车状态信息和控制请求,包括储气罐气压、故障等级、控制模式,以及当前车速、控制指令;根据当前重载智能运输车的状态信息,目标制动控制要求,解算制动控制量(制动模式、制动减速度等);根据控制量对重载智能运输车进行制动控制;采集制动气室压力,判断制动工作状态;作为故障判断和解算制动控制量的输入。具体而言,包括以下步骤:
步骤一:根据运输车工作状态判断当前制动方式为驻车制动还是行车制动,若为行车制动,则重复执行步骤二至步骤四,直至驻车,若为驻车制动,则执行步骤五。
其中,需先进行车辆故障检测,同时,将车辆故障根据运输车自身功能状况和环境障碍状况进行分类,若为运输车自身功能状况,则启动驻车制动,若为环境障碍状况,则根据运输车允许的制动距离判断当前制动方式为驻车制动还是行车制动。
具体而言,如图3所示,当运输车收到行车制动请求时,采取驱动轮和从动轮同时抱死的方式进行制动,在制动过程中,为了充分利用附着条件,以及处于对制动时汽车行驶方向的稳定性考虑,采取前后轮同时抱死,制动时的受力分析如下:
其中,F
在不考虑电机回馈力矩的情况下,前后轮附着力等于制动力,且前后轮的附着力等于各自的制动力,此时
由于不同路况下变量附着力系数
在考虑驱动电机直连的驱动桥(通常是后桥)的回馈力矩情况下,需要将上述附着力计算公式的右边减去电机回馈力矩M和滚动半径r的商。
其中,F
如图4所示,本制动系统的控制方法一个主要方面是通过将减速度作为输入,计算出F
步骤二,根据运输车工作状态获取运输车行车制动的目标减速度,采集运输车当前的轮速,并根据上一时刻的轮速计算当前时刻运输车的实际减速度,同时采集当前时刻与主动轮连接的驱动电机的回馈力矩。
步骤三,根据所述目标减速度与实际减速度的差值以及所述回馈力矩分别计算运输车驱动轮和从动轮的附着力变化量,根据所述驱动轮和从动轮的附着力变化量分别生成运输车驱动轮及从动轮制动阀调节量。具体而言,根据所述驱动轮和从动轮的附着力变化量以及上一时刻所述驱动轮和从动轮的附着力计算当前时刻所述驱动轮和从动轮的附着力,根据当前时刻所述驱动轮和从动轮的附着力,通过查表的方式匹配当前时刻所述驱动轮和从动轮的附着力所对应的行车制动的气压压力值,根据该压力值与上一时刻行车制动的气压压力值计算运输车驱动轮及从动轮制动阀调节量。
在制动过程中,与主动轮连接的驱动电机还用于将所述主动轮在行车制动过程中的转动机械能转化为电能,并将该电能存储在电池中。
步骤四,根据运输车驱动轮及从动轮制动阀调节量调整驱动轮及从动轮制动气室的压力值,使得运输车在行车制动过程中以恒定的目标减速度进行驻车。
步骤五,开启运输车驻车制动和/或冗余制动,使得运输车驻车。
按照本发明的另一个方面,还提供了一种重载智能运输车智能制动系统,包括主控制模块、整车控制器VCU、车速传感器、EBS制动控制器、驻车制动模块、冗余制动模块、与主动轮连接的驱动电机以及驱动电机回馈力矩采集器。
所述主控制模块用于根据运输车工作状态判断当前制动方式为驻车制动还是行车制动,并将前制动方式发送给所述整车控制器VCU。
所述驻车制动模块用于接收所述整车控制器VCU发送的驻车制动指令,并根据该驻车制动指令执行驻车制动动作。所述驻车制动模块包括驻车制动电磁阀,以及驻车制动气室。该驻车制动电磁阀与所述整车控制器VCU电性连接,并在所述整车控制器VCU的控制作用下,通过电路的通断实现对气路的通断,执行驻车制动及解除驻车制动动作。
所述冗余制动模块用于接收所述整车控制器VCU发送的冗余制动指令,并根据该冗余制动指令执行冗余制动动作。所述冗余制动模块包括冗余制动电磁阀,以及行车制动气室。该冗余制动电磁阀与所述整车控制器VCU电性连接,并在所述整车控制器VCU的控制作用下,在整车控制器VCU判定出现紧急异常情况下,打开冗余制动电磁阀,执行冗余制动动作。
所述EBS制动控制器用于接收所述整车控制器VCU发送的行车制动指令,并根据该行车制动指令执行行车制动动作。所述行车制动系统包括了EBS控制器,轮速传感器、气压传感器、单通道气压调节阀和ABS阀。其中EBS控制器、气压传感器与所述整车控制器VCU电性连接,轮速传感器、单通道气压调节阀和ABS阀与EBS控制器电性连接,EBS控制器在所述整车控制器VCU的控制作用下,执行行车制动指令。
所述车速传感器用于实时采集所述主动轮与从动轮的车速。
所述驱动电机回馈力矩采集器用于实时采集所述驱动电机的电机回馈力矩。同时,驱动电机的动力输出轴与驱动轮的驱动桥连接,用于将所述主动轮在行车制动过程中的转动机械能转化为电能,并将该电能存储在电池中。
所述整车控制器VCU根据所述主控制模块发送的运输车行车制动的目标减速度、所述车速传感器采集的所述主动轮与从动轮的车速以及驱动电机回馈力矩采集器采集的电机回馈力矩分别计算运输车驱动轮和从动轮的附着力变化量,并根据所述驱动轮和从动轮的附着力变化量对别生成运输车驱动轮及从动轮制动阀调节量,以此来调整驱动轮及从动轮制动气室的压力值,使得运输车在行车制动过程中以恒定的目标减速度进行驻车。
实施例1
本实施例提供的一种重载智能运输车智能制动方法的具体步骤如下:
(1)重载智能运输车工作过程中,实时监控制动储气筒压力,当压力低于预设下阈值时,开启气泵打气,当压力高于预设上阈值时,关闭气泵停止打气,确保制动系统的气压源稳定。
(2)监控车辆运行状态,识别出严重故障情况下,本制动系统将激活紧急制动功能,使车辆尽快停止运动,确保车辆及周边人员设备的安全。
(3)获取制动控制指令,该指令分为两种,一种是驻车制动,另外一种是行车制动。其中驻车制动相对简单,只涉及到了驻车制动阀的开启和关闭;比较复杂的是行车制动,也是本智能制动系统方案的主要说明内容。行车制动以制动减速度的方式作为本制动系统的输入控制量,此外,还需要采集各车轮,以及主驱电机的回馈力矩。在本实施例中,前轮为从动轮,后轮为驱动轮,主驱电机即驱动电机与后轮的驱动桥连接。在没有收到行车制动减速度请求时,关闭所有的制动阀,车辆无制动;当收到制动减速度请求后,为了充分利用附着条件,以及处于对制动时汽车行驶方向的稳定性考虑,采取前后轮同时抱死,制动时的受力分析如下:
其中,F
在不考虑电机回馈力矩的情况下,前后轮附着力等于制动力,且前后轮的附着力等于各自的制动力,此时
结合(1)-(4)消去变量附着力系数
在考虑电机直连的驱动桥(通常是后桥)的回馈力矩情况下,需要将公式(7)的右边减去电机回馈力矩M和滚动半径r的商。
本制动系统的控制方法一个主要方面是通过将减速度作为输入,计算出F
在调控附着力时,采用了PID控制,以目标减速度作为目标量,通过对前/后行车制动阀的调控,以及驱动电机的扭矩控制,实时采集计算轮速变化,并作为负反馈输入,供下一次调控,具体如下:
首先,根据运输车工作状态获取运输车行车制动的目标减速度,即上述的目标量,采集运输车当前的轮速,并根据上一时刻的轮速计算当前时刻运输车的实际减速度,同时采集当前时刻与主动轮连接的驱动电机的回馈力矩。
其次,根据所述目标减速度与实际减速度的差值以及所述回馈力矩分别计算运输车驱动轮和从动轮的附着力变化量,根据所述驱动轮和从动轮的附着力变化量对别生成运输车驱动轮及从动轮制动阀调节量。
最后,根据运输车驱动轮及从动轮制动阀调节量调整驱动轮及从动轮制动气室的压力值,使得运输车在行车制动过程中以恒定的目标减速度进行驻车。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种重载智能运输车智能制动方法及系统
- 重载智能运输车协同控制方法、系统、电子终端及存储介质