一种中间工位限位装置
文献发布时间:2023-06-19 10:24:22
技术领域
本发明涉及隔离开关设备技术领域,尤其涉及一种中间工位限位装置。
背景技术
隔离开关作为电力系统中的核心元器件之一,一是起到承载电流的作用,二是提供明显检修断口的作用。隔离开关按功能分为两工位隔离开关(只提供隔离断口功能)与三工位隔离开关(同时提供到隔离断口及接地断口这两种功能)。
二工位隔离开关表示其只有合闸位置和分闸位置;三工位隔离开关表示其具有合闸位置、隔离位置和接地位置。
目前的直流供电系统中,当隔离开关运动到隔离位时,动触头处于悬空状态,因自身重力或电动力的作用,易导致动触头跑偏,从而造成电力事故。
发明内容
有鉴于此,有必要提供一种中间工位限位装置,用以解决在现有的直流供电系统中,当隔离开关运动到隔离位时,动触头处于悬空状态,因自身重力或电动力的作用,导致动触头跑偏,从而造成电力事故的问题。
本发明提供一种中间工位限位装置,安装在隔离开关的基座板,其特征在于,包括主轴、凸轮、左防脱半轴、右防脱半轴、左挡块、右挡块、左限位组件以及右限位组件,所述主轴垂直穿过基座板,所述凸轮套设固定在主轴上,左限位组件和右限位组件在凸轮上方的两侧对称设置,所述凸轮的凸起部限制在左限位组件和右限位组件之间的间隙内,所述左挡块和右挡块均垂直固定在基板座上,左限位组件和右限位组件分别在基板座上转动连接,左挡块位于左限位组件的左侧作为左限位组件顺时针转动的极限位置,右挡块位于右限位组件的右侧作为右限位组件逆时针转动的极限位置,所述左防脱半轴和右防脱半轴均垂直转动连接在基座板上,所述左防脱半轴位于左限位组件的左侧、左挡块的上方作为左限位组件逆时针转动的极限位置,所述右防脱半轴位于右限位组件的右侧、右挡块的上方作为右限位组件顺时针转动的极限位置,所述左限位组件和右限位组件结构相同。
具体地,所述左限位组件和右限位组件均包括定位组件、掣子、扭簧Ⅰ、扭簧Ⅱ、转动轴、定位轴以及定位销,所述定位组件定位板,固设于定位板相邻两侧的限位块和连接块,所述转动轴的一端与基座板转动连接,所述定位板经由定位销与转动轴固定连接,所述定位轴穿过连接块与掣子固定连接,所述定位轴与连接块转动连接,所述掣子的一侧与定位板相抵触,所述扭簧Ⅰ套设在转动轴上,所述扭簧Ⅱ套设在定位轴上,所述扭簧Ⅰ上成型有第一扭臂和第二扭臂,所述第一扭臂卡设在定位板内,所述左限位组件的第二扭臂与左挡块相抵触,所述左挡块上设有左限位杆,左限位杆位于第二扭臂与定位销之间,以供所述定位板在顺时针转动时,所述左限位杆对定位销进行阻挡,所述扭簧Ⅱ上成型有第三扭臂和第四扭臂,所述第三扭臂卡设在掣子内,所述第四扭臂与转动轴相抵触,在不受外力作用下,所述左脱扣半轴经由限位块对定位板进行阻挡;所述右限位组件上的第二扭臂与右挡块相抵触,所述右挡块上设有右限位杆,右限位杆位于第二扭臂与定位销之间,以供所述定位板在逆时针转动时,所述右限位杆对定位销进行阻挡,在不受外力作用下,当所述定位板顺时针旋转时,所述右脱扣半轴经由限位块对定位板进行阻挡。
作为优选,所述左挡块和右挡块的侧壁均设有限位台阶,所述第二扭臂与限位台阶相抵触。
具体地,所述定位板上设有供第一扭臂卡设的第一连接孔,所述掣子上开设有供第三扭臂卡设的第二连接孔。
作为优选,所述第一扭臂和第二扭臂均设有一折弯部。
作为优选,所述凸轮的凸起部处垂直设有连接轴,连接轴上套设有可绕其旋转的轴套。
具体地,所述左防脱半轴仅能顺时针转动,右防脱半轴仅能逆时针转动,且二者转动后可分别解除对左限位组件和右限位组件的限制。
本发明的有益效果是:
(1)本发明提供一种中间工位限位装置,为了避免触头跑偏,在凸轮两侧设置左限位组件和右限位组件,此时动触头相应处在隔离位置,避免动触头处于悬空状态,在自身重力或电动力的作用,导致动触头跑偏,从而造成电力事故。
(2)本发明提供一种中间工位限位装置,当操作失误时,即未解锁左脱扣半轴或右脱扣半轴时便旋转转动轴,左限位组件或右限位组件收到凸轮的推力很大,但是传动到左防脱半轴或右防脱半轴的力很小,因此只需在左防脱或右防脱半轴施加很小的力即可解锁,具有很好的卸力效果,避免机构锁死,延长机构的使用寿命。
附图说明
下面结合附图和实施例对本发明进一步说明。
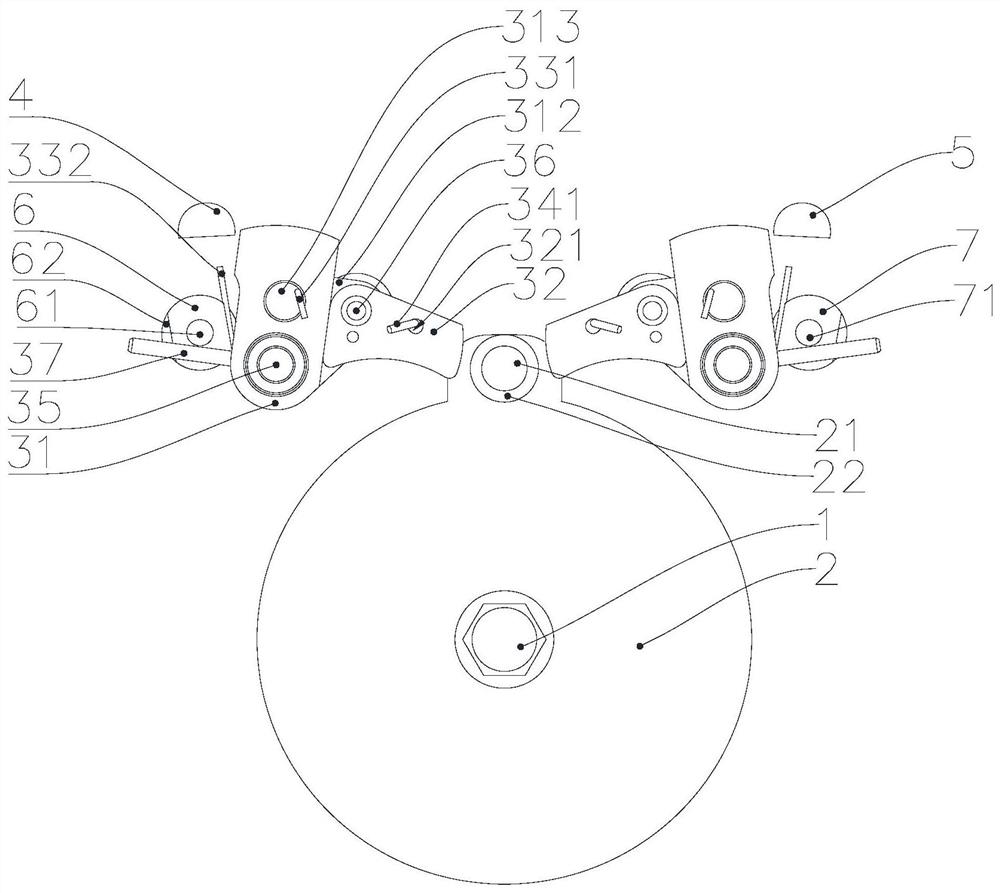
图1是本发明一种中间工位限位装置的主视图;
图2是本发明左防脱半轴未解除凸轮转动的结构示意图;
图3是本发明左防脱半轴解除凸轮转动的结构示意图;
图4是本发明凸轮脱离中间位置结构示意图;
图5是本发明凸轮卡入中间位置结构示意图;
图6是本发明左限位组件和右限位组件结构示意图;
图7是本发明是左防脱半轴受力示意图。
具体实施方式
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本申请一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
如图7所示,其中:O
由机构简图一已知条件及力矩平衡原理分别对O
N
一.对O
N
代入数值得:
345000=75sin67°F
可求得:F
二.对O
F
代入数值得:
4998x30.8xsin13°=9.2sin40°F
可求得:F
三.对O
F
代入数值得:
5856x16.3xsin43°=37sin72°F
可求得:F
四.对O
其中:F
查《机械设计手册》表1-1-7可知,有润滑静摩檫系数f=0.12,代入数值得:1849x0.12x7.5=40F
可求得:F=(1849x0.12x7.5)/40=41.67N。
一种中间工位限位装置,安装在隔离开关的基座板,包括主轴1、凸轮2、左防脱半轴4、右防脱半轴5、左挡块6、右挡块7、左限位组件以及右限位组件,所述主轴1垂直穿过基座板,所述凸轮2套设固定在主轴1上,左限位组件和右限位组件在凸轮2上方的两侧对称设置,所述凸轮2的凸起部限制在左限位组件和右限位组件之间的间隙内,所述左挡块6和右挡块7均垂直固定在基板座上,左限位组件和右限位组件分别在基板座上转动连接,左挡块6位于左限位组件的左侧作为左限位组件顺时针转动的极限位置,右挡块7位于右限位组件的右侧作为右限位组件逆时针转动的极限位置,所述左防脱半轴4和右防脱半轴5均垂直转动连接在基座板上,所述左防脱半轴4位于左限位组件的左侧、左挡块6的上方作为左限位组件逆时针转动的极限位置,所述右防脱半轴5位于右限位组件的右侧、右挡块7的上方作为右限位组件顺时针转动的极限位置,所述左限位组件和右限位组件结构相同。
在一种具体实施例中,所述左限位组件和右限位组件均包括定位组件、掣子32、扭簧Ⅰ33、扭簧Ⅱ34、转动轴35、定位轴36以及定位销37,所述定位组件定位板31,固设于定位板相邻两侧的限位块311和连接块312,所述转动轴35的一端与基座板转动连接,所述定位板31经由定位销37与转动轴35固定连接,所述定位轴36穿过连接块312与掣子32固定连接,所述定位轴36与连接块312转动连接,所述掣子32的一侧与定位板31相抵触,所述扭簧Ⅰ33套设在转动轴35外,所述扭簧Ⅱ34套设在定位轴36外,所述扭簧Ⅰ33上成型有第一扭臂331和第二扭臂332,所述扭簧Ⅱ34上成型有第三扭臂341和第四扭臂342,所述第一扭臂331卡设在定位板31内,所述左限位组件第二扭臂332与左挡块6相抵触,所述左挡块6上设有左限位杆61,左限位杆61位于第二扭臂332与定位销37之间,所述左限位杆61可与定位销37对应阻挡,使得定位板31在顺时针旋转时存在一个极限位置,所述第三扭臂341卡设在掣子32内,所述第四扭臂342与转动轴35相抵触,在不受外力作用下,所述限位块311配合左防脱半轴4可使定位板31逆时针转动存在一个极限位置;所述右限位组件上的第二扭臂332与右挡块7相抵触,所述右挡块7上设有右限位杆71,右限位杆71位于第二扭臂332与定位销37之间,所述右限位杆71可与定位销37对应阻挡,使得定位板31在逆时针旋转时存在一个极限位置,在不受外力作用下,所述限位块311配合右防脱半轴5可使定位板31顺时针转动存在一个极限位置。
在本具体实施例中,包括主轴1通过联动机构与隔离开关的动触头联动,当主轴1转动时,带动动触头绕其铰接点旋转,凸轮2固定套设在主轴1上,故当凸轮2的凸起部位限制在左限位组件和右限位组件之间时,凸轮2和主轴1均被卡主不能转动,相应的动触头也不能转动,此时动触头被锁定的位置就处在接地位置和工作位置之间的隔离位置,可以保证完全隔离。
在一种具体实施例中,所述左挡块6和右挡块7的侧壁设有限位台阶62,所述第二扭臂332与限位台阶62相抵触。通过设置限位台阶62,增加了第二扭臂332与左挡块6和右挡块7之间的接触面积,防止压力集中导致第二扭臂332发生形变。
在一种具体实施例中,所述定位板31上设有供第一扭臂331卡设的第一连接孔313,所述掣子32上开设有供第三扭臂341卡设的第二连接孔321。
在一种具体实施例中,所述第一扭臂331和第二扭臂332均设有一折弯部8。设置折弯部8可防止扭簧Ⅰ33可扭簧Ⅱ34分别从转动轴35和转动轴35上滑脱。
在一种具体实施例中,所述凸轮2的凸起部处垂直设有连接轴21,连接轴21上套设有可绕其旋转的轴套22。
在一种具体实施例中,所述左防脱半轴4仅能顺时针转动,右防脱半轴5仅能逆时针转动,且二者转动后可分别解除对左限位组件和右限位组件的限制。
工作原理:如图1所示,凸轮2被限制在中间位置,此时动触头相应处在隔离位置,当主轴1和凸轮2继续转动到图2所示位置,挚子32处在极限位置,阻碍凸轮2继续转动,因此动触头会保持在隔离位置;如图3所示,当左防脱半轴4的下端施一很小的推力F,即可使左防脱半轴4逆时针旋转,解扣左限位组件,那么左限位组件在轴套22的推力(该推力由凸轮2的转动产生)下,做逆时针的旋转运动,轴套22沿掣子32表面滚动,最终凸轮2的凸起部位从中间位置脱出;如图4所示,主轴1带动凸轮2做旋转运动,从而带动动触头从隔离位置转变到工作位,凸轮2的凸起部位从中间位置完全脱出后,左限位组件在第二扭臂332的作用下复位到极限位置,定位销37同时也复位重新扣住左挡块6;对右限位组件的操作也一样,给予右防脱半轴5一个推力,即可解扣右限位组件,凸轮2即可顺时针转动从中间位置脱出,最终带动动触头到达接地位置;如图5所示,当动触头从工作位置转向隔离位置时,凸轮2的凸起部位推动挚子32,挚子32向上运动,直至凸轮2的凸起部位卡入中间位置后,挚子32复位重新将凸轮2锁定;该装置可以准确锁定动触头的位置,保证动触头在隔离位置的准确性,并且在解锁时,左限位组件收到凸轮2的推力很大,但是传动到左防脱半轴4或右防脱半轴5的力很小,因此只需在左防脱半轴4或右防脱半轴5施加很小的力即可解锁,具有很好的卸力效果。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本、技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
- 一种三工位隔离开关中间限位装置
- 一种中间工位限位装置