一种融合影像信息的摄影测量点云滤波方法
文献发布时间:2023-06-19 10:24:22
技术领域
本发明涉及一种摄影测量点云滤波方法,尤其涉及一种融合影像信息的摄影测量点云滤波方法。
背景技术
数字高程模型(digitalelevation model,DEM)作为4D产品之一,在测绘、国土和国防建设等领域有着广泛的应用。现阶段国土调查和测图等工作中均使用测绘卫星或航空影像作为数据源,利用影像匹配技术获取摄影测量点云,经过后期处理生成DEM。而在测图自动化程度较高的生产流程中,摄影测量点云自动滤波技术仍不成熟,DEM后期处理需花费大量人力物力,因此研究高效、快速、适用性强的摄影测量点云滤波方法具有重要意义。
传统的点云滤波算法大多数针对LiDAR点云设计,已提出的LiDAR点云滤波算法主要有基于坡度的滤波算法、基于数学形态学的方法和基于表面的滤波算法几类,上述点云滤波算法虽然在特定的条件下取得了较好的滤波效果,但存在针对不同场景时适用性不强、算法参数通用性差等问题。摄影测量点云依赖于影像匹配技术及地面纹理信息,造成摄影测量点云相较于LiDAR点云存在噪声大、精度低且无法穿透植被等缺陷,因此直接利用针对LiDAR点云设计的算法实施摄影测量点云滤波,不能取得理想的滤波效果。
发明内容
本发明的目的是提供一种融合影像信息的摄影测量点云滤波方法。
本发明的目的是通过以下技术方案实现的:
本发明的融合影像信息的摄影测量点云滤波方法,包括步骤:
a、摄影测量点云及其深度图的获取:
获取点云之前,需对影像进行定向;
采用高分辨率遥感影像一体化测图系统—PixelGrid对航空影像进行空中三角测量,以精化影像定姿定位参数;
采用的密集匹配算法为半全局匹配算法,主要采用互信息作为测度,匹配代价如公式(1):
式中:全局代价函数E(D)由一个数据项和两个光滑项组成,D代表参考影像的视差影像,包含了参考影像上所有像素x
b、多源数据融合和影像分类:
制作数字正射影像需要相应区域DEM作为基础;
手动去除异常匹配点对影像匹配点云经过内插处理生成数字表面模型,将DSM代替DEM作为生成正射影像的底图;
c、摄影测量点云滤波:
对影像进行分类后可生成地面类和非地面类二分类专题图,依据此分类结果进行点云滤波。
由上述本发明提供的技术方案可以看出,本发明实施例提供的融合影像信息的摄影测量点云滤波方法,利用摄影测量点云所特有的影像信息,借助空中三角测量技术获取点云深度图,将两种图像信息融合作为知识引导达到摄影测量点云滤波的目的,该方法自动化程度高、对不同场景适用性强,突破了传统生产高精度DEM时所需的大量人工编辑工作。
附图说明
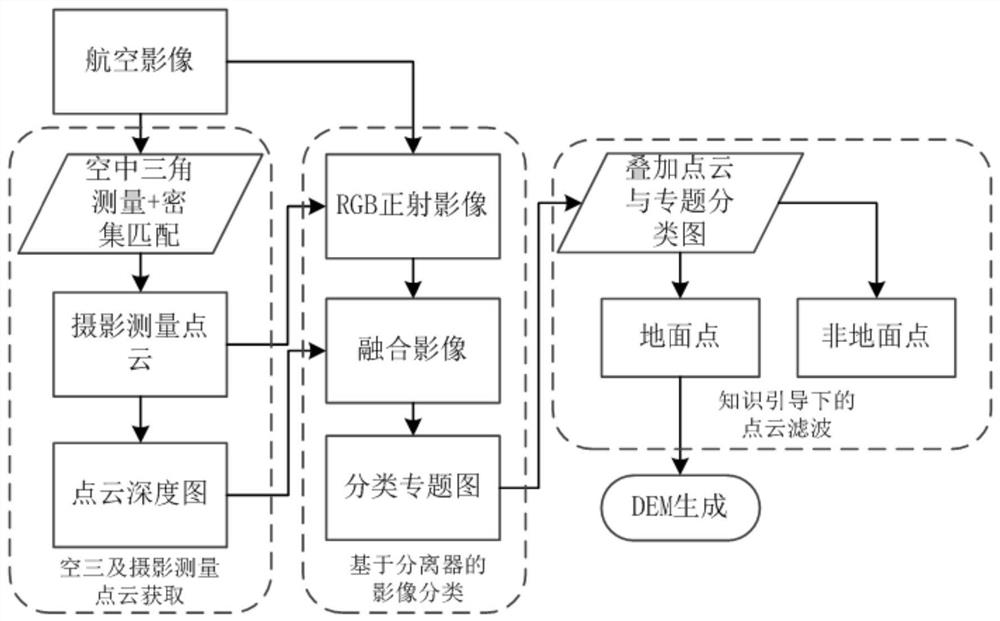
图1为本发明实施例提供的融合影像信息的摄影测量点云滤波方法结构示意图;
图2为摄影测量点云及其深度图(a.带有RGB信息的摄影测量点云及其局部放大图;b.点云深度图);
图3为DOM及其融合影像(a.正射影像;b.DOM与深度图融合影像);
图4为新型分类器影像分类结果;
图5摄影测量点云滤波后的结果;
图6滤波后的地面点生生成的DEM(a.滤波后生成的DEM;b.手动编辑生成的参考DEM)。
具体实施方式
下面将对本发明实施例作进一步地详细描述。本发明实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
本发明的融合影像信息的摄影测量点云滤波方法,其较佳的具体实施方式是:
包括步骤:
a、摄影测量点云及其深度图的获取:
获取点云之前,需对影像进行定向;
采用高分辨率遥感影像一体化测图系统—PixelGrid对航空影像进行空中三角测量,以精化影像定姿定位参数;
采用的密集匹配算法为半全局匹配算法,主要采用互信息作为测度,匹配代价如公式(1):
式中:全局代价函数E(D)由一个数据项和两个光滑项组成,D代表参考影像的视差影像,包含了参考影像上所有像素x
b、多源数据融合和影像分类:
制作数字正射影像需要相应区域DEM作为基础;
手动去除异常匹配点对影像匹配点云经过内插处理生成数字表面模型,将DSM代替DEM作为生成正射影像的底图;
c、摄影测量点云滤波:
对影像进行分类后可生成地面类和非地面类二分类专题图,依据此分类结果进行点云滤波。
所述步骤a中,影像提供了丰富的光谱及纹理信息,利用密集匹配点云能获取相应区域点云深度图,其深度值代表该点在实际地物处的高程;
所述点云深度图类似于影像,也由一定间隔的规则阵列逐行逐列进行像素组织,点云深度图的每个像素值代表高程。
所述步骤b中,生成的正射影像空间分辨率为20cm,此过程在PixelGrid中完成;
为了提高其分类精度,首先将点云深度图代表的非光谱特征与正射影像通过波段堆叠的方式融合,形成一副既有地物高程信息又有地物光谱特征的复合图像;再引入支持向量机的分类方法对融合影像进行分类解译;
利用SVM对融合后的影像进行分类,按照所选数据源将其分为五类,包括:建筑物、树木、草地、道路及阴影;由于影像分类的目的是实现非地面点的滤除,因此将分类结果归并为地面类和非地面类,即将建筑物、树木归为非地面类,剩余地类归为地面类,对初步分类结果经过Majority分析、聚类处理等后处理。
所述步骤c中,具体步骤为:
首先将分类结果中的非地面类转换为矢量;
其次将非地面类矢量与摄影测量点云叠加,利用非地面类矢量范围滤除点云中非地面点,剩余点云认为是地面点以达到点云滤波目的;
最后利用地面点内插生成DEM。
本发明的融合影像信息的摄影测量点云滤波方法,利用摄影测量点云所特有的影像信息,借助空中三角测量技术获取点云深度图,将两种图像信息融合作为知识引导达到摄影测量点云滤波的目的,该方法自动化程度高、对不同场景适用性强,突破了传统生产高精度DEM时所需的大量人工编辑工作。
具体实施例:
图1为一种融合影像信息的摄影测量点云滤波方法的流程图,其整体实施方法为:
a、摄影测量点云及其深度图的获取
获取摄影测量点云之前,需对影像进行定向。采用中国测绘科学研究院研发的高分辨率遥感影像一体化测图系统—PixelGrid对航空影像进行空中三角测量,以精化影像定姿定位参数。本研究所采用的密集匹配算法为半全局匹配(semi-global matching,SGM)算法,SGM主要采用互信息作为测度,匹配代价如公式(1)所示。
式中:全局代价函数E(D)由一个数据项和两个光滑项组成,D代表参考影像的视差影像,包含了参考影像上所有像素x
影像提供了丰富的光谱及纹理信息,但缺乏非光谱信息,例如地物高程信息、地物点与其相邻地物的空间结构关系等。利用密集匹配点云可获取相应区域点云深度图,其深度值代表该点在实际地物处的高程。点云深度图类似于影像,也由一定间隔的规则阵列逐行逐列进行像素组织,与常见影像像素值代表意义不同,点云深度图的每个像素值代表高程。图2-a为航空影像经过空三和密集影像匹配生成的点云,每个点均从原始影像中获取该点地物真彩色RGB值,图2-b为根据点云获取的深度图。
b、多源数据融合和影像分类;
制作数字正射影像(digital orthophoto map,DOM)需要相应区域DEM作为基础。手动去除异常匹配点(高程异常点),对影像匹配点云经过内插处理生成数字表面模型(digital surface model,DSM)。经过此步骤处理,将DSM代替DEM作为生成正射影像的底图,生成的正射影像空间分辨率为20cm,如图3-(a),此过程在PixelGrid中完成。
航空影像虽然空间分辨率很高,地物纹理细节信息丰富,但其地物光谱分布不规律,类内方差(其光谱信息)很大,而类间方差减小;还有较高的影像分辨率充分反映了地物细节特征,对于大尺度同质性地物的分类精度降低;另外,由于航空影像一般为三波段的真彩色影像,因此利用传统分类方法其精度往往达不到应用需求。针对上述航空影像在地物分类中存在的问题,为了提高其分类精度,首先将点云深度图代表的非光谱特征与正射影像通过波段堆叠的方式融合,形成一副既有地物高程信息又有地物光谱特征的复合图像,如图3-(b);再引入支持向量机的分类方法对融合影像进行分类解译。
新型分类器是高分辨率遥感影像与计算机视觉、机器学习结合的重要研究方向,其中SVM是一种基于统计学习理论的新算法,它通过决策面(也称“最佳超平面”)区分不同类,并最大化类间边界。利用SVM对融合后的影像进行分类,按照所选数据源将其分为五类,包括建筑物、树木、草地、道路及阴影。由于影像分类的目的是实现非地面点的滤除,因此将分类结果归并为地面地面类和非地面类,即将建筑物、树木归为非地面类,剩余地类归为地面类,对初步分类结果经过Majority分析、聚类处理等后处理,其分类结果如图4所示。
c、摄影测量点云滤波
对影像进行分类后可生成二分类(地面类和非地面类)专题图,依据此分类结果进行点云滤波。具体步骤为,首先将分类结果中的非地面类转换为矢量;其次将非地面类矢量与摄影测量点云叠加,利用非地面类矢量范围滤除点云中非地面点,剩余点云可认为是地面点以达到点云滤波目的,滤波结果如图5所示;最后利用地面点内插生成DEM。
利用某城市区域航空影像作为获取摄影测量点云的数据源,所获取影像相机搭载于固定翼飞机平台,其平均航高为1400m,影像空间分辨率为20cm。相较于轻型无人机系统,固定翼航摄平台姿态更为稳定,影像畸变相对较小;再利用平台搭载的DGPS及IMU系统,能更为精确的获取每张相片的外方位元素,为无控自动空三获得更高精度提供保证。原始影像首先经过金字塔影像生成、特征点提取、连接点匹配、POS辅助区域网平差完成定向,然后利用SGM算法进行影像密集匹配点云生成(25个点/m2)。计算每个点三维坐标的同时,可从原始影像获取每个点的RGB值。
融合点云深度图和影像信息,并对融合影像进行分类,利用新型分离器的融合影像分类结果优于单纯只有影像信息的分类结果,该分类结果为点云分类提供依据。为了反映融合点云深度图后对影像分类效果的提升,分别对融合前后的影像利用SVM进行分类并评价其精度,其结果如表1,表2。以分类结果作为知识引导,对摄影测量点云滤波后的一类误差和二类误差见表3。
表1、融合前影像分类的混淆矩阵及其精度指标
表2、融合后影像分类的混淆矩阵及其精度指标
表3、摄影测量点云滤波两类误差统计结果
由上表可知,一类误差和二类误差分别为4.12%和14.07%,表明相比于去除非地面的能力,利用该方法能更有效的保留地面点。总体误差为9.2%,表明有90.8%的评价参考点被正确分类。
点云滤波的重要目的是为了生成DEM,利用该方法获取点云滤波结果后,利用双线性内插方法生成该区域格网间距为1m DEM(如图6-a),为了验证生成DEM精度,人工编辑该区域点云数据并生成参考DEM(如图6-b)。首先计算该方法生成的DEM与参考DEM的相关系数,该指标可以表征两个DEM之间的统计相关性,并说明两个DEM表面的贴合度。通过计算相关系数为0.968,表明摄影测量点云滤波结果生成的DEM与参考DEM之间有高度正相关关系,表面贴合度较好。其次对生成的DEM经过极少量人工编辑,并从该参考DEM随机选择一定数量的检查点,计算其高程中误差,其结果如表4。
表4、DEM精度检查结果
DEM精度检查结果表明,利用该点云滤波方法生成的DEM,在经过极少量人工编辑的情况下,高程精度优于0.5m,满足1:2000地形图内业精度要求。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
- 一种融合影像信息的摄影测量点云滤波方法
- 一种地面摄影测量点云构建的影像信息采集辅助设备