一种智能魔方机器人
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及教学机器人技术领域,尤其涉及一种智能魔方机器人。
背景技术
魔方是人们在业余时间十分喜欢的一种智力游戏,魔方不仅可以锻炼人的思维、空间想象、手脑联动等能力,而且会加强人们的学习能力,让业余生活变得更加多姿多彩。
目前,有关魔方的教程很多,然而大多采用书面教学的方式,不够直观,空间立体感不强的人学习起来比较困难。后来又发展出魔方机器人,但是现有的魔方机器人功能不够完善,主要是魔方识别率低,导致复原速度较慢,并且兼容性不高。另外,大多数魔方机器人只具有魔方复原的能力,而不具备打乱魔方的功能,每次复原后需要人为操作打乱魔方。还有的魔方机器人因结构复杂、占空间大、制造成本高,因此不适合推广使用。
发明内容
本发明提供了一种智能魔方机器人,能够模拟人手动作,且魔方复原速度快,同时还具有打乱魔方的功能,可以实现更好的教学效果;并且结构简单、制造成本低,适合推广应用。
为了达到上述目的,本发明采用以下技术方案实现:
一种智能魔方机器人,包括魔方拧动机构及控制系统;所述魔方拧动机构由底座及设于底座上的4组平移旋转装置组成,4组平称旋转装置沿水平的纵、横方向两两相对设置;每组平移旋转装置均包括步进电机、曲柄连杆机构、舵机及魔方卡爪;所述步进电机的输出轴通过曲柄连杆机构连接舵机,并能够使舵机沿纵向或横向水平移动,所述舵机的输出轴连接魔方卡爪,并能够带动魔方卡爪绕水平轴线转动;所述魔方卡爪用于夹紧魔方;所述控制系统分别连接各组平移旋转装置中的步进电机与舵机。
所述底座为十字形框架结构,十字形框架的顶部沿横向和纵向分别设直线导轨;所述舵机安装在舵机保持架上,舵机保持架的底部设滑块与对应的直线导轨配合滑动。
所述底座由铝合金型材制成。
所述步进电机通过步进电机保持架固定在底座上。
所述曲柄连杆机构由曲柄及连杆组成,曲柄的一端与步进电机的输出轴固定连接,另一端与连杆的一端铰接,连杆的另一端与对应的滑块铰接。
所述步进电机为两相步进电机,其步距角为1.8°,额定电流为1.7A,扭矩为420mN·m。
所述舵机为HL-ZX01S/HL-ZX01D总线舵机,转动速度为0.16sec/60°,转动精度为0.24°。
所述控制系统由主控制器、开发板、usb转ttl模块组成;所述开发板、usb转ttl模块分别连接主控制器。
所述主控制器为树莓派3b+主控制器;所述开发板采用arduino uno开发板。
一种智能魔方机器人,还包括摄像头、CNC电机拓展板及电源;所述摄像头为4个,一一对应设于4个魔方卡爪的外上方,所述摄像头、CNC电机拓展板分别连接控制系统;CNC电机拓展板另外连接各个步进电机;所述电源为步进电机、舵机及控制系统供电。
与现有技术相比,本发明的有益效果是:
具有模拟人手动作的功能,魔方复原速度快,还具有打乱魔方的功能,可以实现更好的教学效果;并且结构简单、制造成本低,适合推广应用。
附图说明
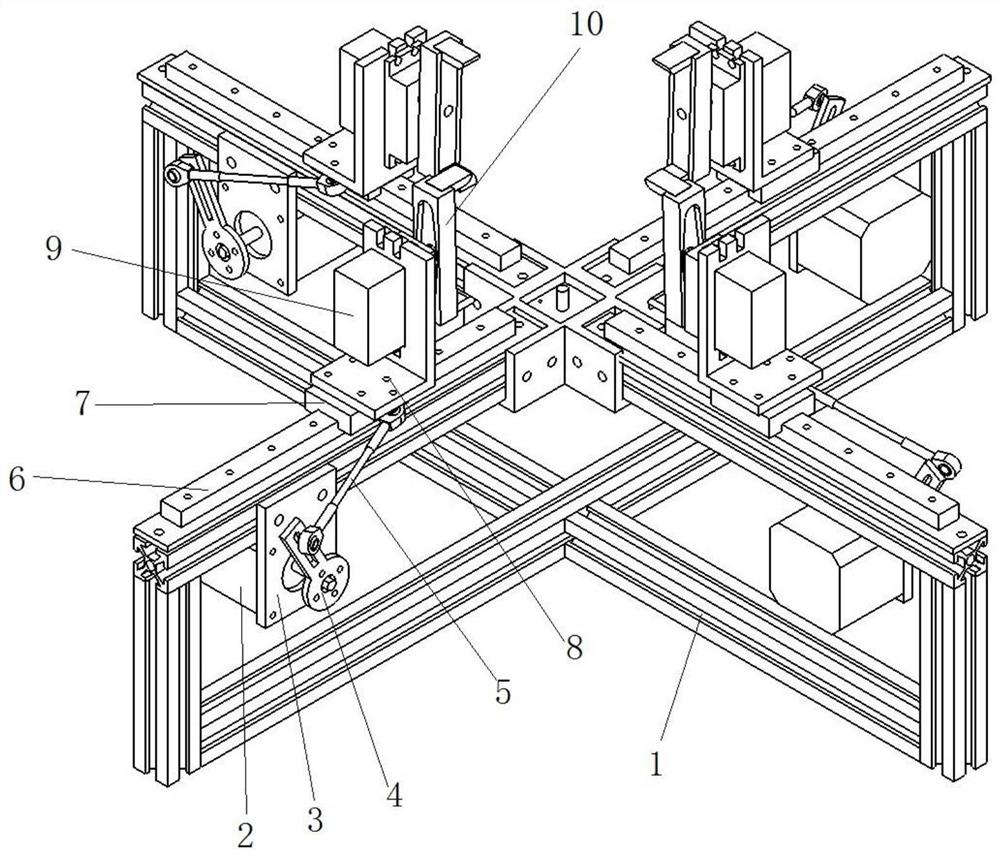
图1是本发明所述一种智能魔方机器人的等轴测视图。
图2是本发明所述一种智能魔方机器人的主视图。
图3是图2的俯视图。
图4是本发明所述一种智能魔方机器人的控制原理框图一。
图5是本发明所述一种智能魔方机器人的控制原理框图二。
图中:1.底座 2.步进电机 3.步进电机保持架 4.曲柄 5.连杆 6.直线导轨 7.滑块 8.舵机保持架 9.舵机 10.魔方卡爪
具体实施方式
下面结合附图对本发明的具体实施方式作进一步说明:
如图1-图3所示,本发明所述一种智能魔方机器人,包括魔方拧动机构及控制系统;所述魔方拧动机构由底座1及设于底座1上的4组平移旋转装置组成,4组平称旋转装置沿水平的纵、横方向两两相对设置;每组平移旋转装置均包括步进电机2、曲柄连杆机构、舵机9及魔方卡爪10;所述步进电机2的输出轴通过曲柄连杆机构连接舵机9,并能够使舵机9沿纵向或横向水平移动,所述舵机9的输出轴连接魔方卡爪10,并能够带动魔方卡爪10绕水平轴线转动;所述魔方卡爪10用于夹紧魔方;所述控制系统分别连接各组平移旋转装置中的步进电机2与舵机9。
所述底座1为十字形框架结构,十字形框架的顶部沿横向和纵向分别设直线导轨6;所述舵机9安装在舵机保持架8上,舵机保持架8的底部设滑块7与对应的直线导轨6配合滑动。
所述底座1由铝合金型材制成。
所述步进电机2通过步进电机保持架3固定在底座1上。
所述曲柄连杆机构由曲柄4及连杆5组成,曲柄4的一端与步进电机2的输出轴固定连接,另一端与连杆5的一端铰接,连杆5的另一端与对应的滑块7铰接。
所述步进电机2为两相步进电机,其步距角为1.8°,额定电流为1.7A,扭矩为420mN·m。
所述舵机9为HL-ZX01S/HL-ZX01D总线舵机,转动速度为0.16sec/60°,转动精度为0.24°。
所述控制系统由主控制器、开发板、usb转ttl模块组成;所述开发板、usb转ttl模块分别连接主控制器。
所述主控制器为树莓派3b+主控制器;所述开发板采用arduino uno开发板。
一种智能魔方机器人,还包括摄像头、CNC电机拓展板及电源;所述摄像头为4个,一一对应设于4个魔方卡爪10的外上方,所述摄像头、CNC电机拓展板分别连接控制系统;CNC电机拓展板另外连接各个步进电机;所述电源为步进电机、舵机及控制系统供电。
本发明所述一种智能魔方机器人,采用十字交叉立体结构,观察空间大,方便从各个角度观察魔方的复原过程,从而提高教学的效果。
为了更加直观地展现魔方的复原过程,本发明应用了人工智能中的视觉识别,通过二阶段算法实现磨方机器人自主完成求解,并模拟人手动作对魔方的六个面进行还原,并且可采用不同方法还原魔方,还原过程可直观的展现出来,让学习魔方的人能够更好的了解。此外,还可以通过控制魔方的转动速度,让学习魔方的人能够清楚每一步的转动顺序。
此外,本发明所述一种智能魔方机器人还具有魔方的打乱功能,从而使魔方的复原每次都不一样,实现在各种情况下魔方的复原。从而有效节约人为打乱魔方的时间,在比赛时能够确保比赛的公平性。
能够自主还原并且转动速度可调,这些对于魔方的初学者来说无疑是十分重要的。这些功能需要对魔方机器人的控制系统进行相应的开发,即将魔方拧动结构、视觉输入系统、核心计算部分整合在一起,同时需要将机械、电子控制部分及硬件部分结合在一起。
以下实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。下述实施例中所用方法如无特别说明均为常规方法。
【实施例】
本实施例中,一种智能魔方机器人由如下部分组成:
一、硬件设计;
1、主控制器;
1)功能介绍;
本实施例中,采用树莓派3b+作为核心主控制器,其功能在于将其他的控制电路进行总汇和,并进行总的计算处理;主控制器内置四个usb串口,可以分别连接arduino、usb转ttl模块,以及调试设备(如鼠标、键盘等),主控制器内部自带一个屏线可以直接与摄像头相连,这样就可以对来自于不同设备的信息进行统一处理,并将其计算的结果反馈给各部件的控制电路,控制各部件完成指定的功能;
2)计算方式;
树莓派本身采用raspbian系统,安装了python2.7设计语言软件后即可进行主程序的编写,运算速度1.2hz,能够在很短的时间内完成魔方的结算。并将结算的结果传输成不同的控制信号进行反馈。
2、Arduino嵌入式控制;
开发板的型号及功能;
本实施例中,智能魔方机器人采用的arduino uno开发板,主要用于控制4个步进电机的形态、运动速度、运动方式及通断状态。
3、总线舵机;
舵机的参数和选型依据:
本实施例,采用杭州海灵智电科技有限公司生产的HL-ZX01D总线舵机,转动速度为0.16sec/60度(4.8v),转动精度为0.24°;控制方式采用串口指令,通过位置、电压、温度进行反馈,实现闭环控制。能够随时检测魔方的位置和各个面旋转之后的相对位置,为顺利拧动魔方提供了很好的保证。
4、步进电机;
1)电气特性:
步进电机采用两相步进电机,其步距角为1.8°,额定电流1.7A,扭矩为420mN.m,能够很好地保证前后推动舵机时克服摩擦阻力,性能稳定,并且能够长时间的运转。
2)控制方法;
步进电机采用脉冲信号控制,根据已知的accle控制库的相关控制理论及控制方法,通过arduino处理后发出的脉冲信号,实现步进电机输出轴的旋转,再通过曲柄连杆机构实现传动。
5、CNC拓展板;
选择原因:
由于arduino uno开发板上的引脚数量有限,无法完成4个步进电机及相关接口的控制,所以需要一个拓展板来完成所需要的控制功能,另外可以将电源所提供的电力直接用于其他元件的供电。
相关引脚及功能介绍
CNC扩展板可以支持A4988、DRV8825等步进电机驱动板。
Arduino 8引脚----------cnc拓展板EN(所有使能有效)
Arduino 5引脚----------cnc拓展板X.DIR
Arduino 2引脚----------cnc拓展板X.STEP
Arduino 6引脚----------cnc拓展板Y.DIR
Arduino 3引脚----------cnc拓展板Y.STEP
Arduino 7引脚----------cnc拓展板Z.DIR
Arduino 4引脚----------cnc拓展板Z.STEP
二、控制策略;
如图4所示,复原魔方时,舵机自动复位,然后步进电机带动舵机前移,通过魔方卡爪夹住魔方,通过摄像头读取第一个面的颜色块信息,旋转,之后重复颜色识别及旋转过程,直到扫描完魔方的六个面。利用六个面的颜色信息,通过二阶段算法解算出还原步骤,然后通过下达控制指令控制4个舵机按顺序转动,在魔方翻转过程中,只通过其中一个魔方卡爪夹住魔方进行旋转,其它魔方卡爪由步进电机带动后退;控制关系如下:
主控制器→Arduino uno开发板→cnc拓展板→步进电机;
主控制器→USB转TTL模块→舵机;
如图5所示,打乱魔方时,控制系统随时生成多个打乱顺序,按顺序拧动魔方进行打乱操作。
三、机械部分;
智能魔方机器人中,魔方拧动机构为机械传动结构,主要功能由4组平移旋转装置实现;每组平移旋转装置中,步进电机、曲柄连杆机构用于实现舵机的平移,采用曲柄连杆传动的原理,将电机轴的旋转运动变为直线运动。舵机用于实现魔方卡爪的旋转。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种可自主抓取魔方的智能解魔方机器人及其解魔方方法
- 一种智能解魔方机器人及使用了该机器人的人机互动系统