一种具有追踪功能的无影灯的控制方法
文献发布时间:2023-06-19 10:54:12
技术领域
本发明涉及智能追踪领域,特别是涉及一种具有追踪功能的无影灯的控制方法。
背景技术
在实际做手术的过程中,医生手里的手术刀位置可能会发生变化,因此,光线聚焦的位置也要随之发生变化,才能解决光线不足的问题。
发明内容
针对上述问题,本发明提供了一种具有追踪功能的无影灯的控制方法,具有保证无影灯跟随手术刀转动保证光线充足的优点。
本发明的技术方案是:
一种具有追踪功能的无影灯的控制方法,包括以下步骤,
S1、以无影灯所在的初始位置W1为原点,并以其横向方向为X轴,纵向方向为Y轴,高度方向为Z轴,建立坐标轴;
S2、以无影灯所在坐标系记录手术刀的坐标位置D1;
S3、分别计算出无影灯位置W1和手术刀位置D1之间的横向距离a1、纵向距离b1和高度距离c1之间的直线距离;
S4、算出位置W1和位置D1所构成直线与竖直方向的夹角为α,调整无影灯的角度;
S5、手术刀或无影灯移动后,坐标轴记手术刀的位置D2,无影灯的位置W2,重复步骤S2-S4。
在进一步的技术方案中,夹角α超过45°时,移动无影灯的位置,记为位置W2,直至位置W2与手术刀位置D2形成的直线与竖直方向的夹角小于等于45°时,停止移动无影灯。
在进一步的技术方案中,无影灯的位置和手术刀的位置及无影灯的位置和手术刀的位置构成的直线与竖直方向的夹角均通过计算机中的三维仿真软件处理。
在进一步的技术方案中,步骤S1的方法如下,
S11、摄影设备记录无影灯的位置W1并将图像信息上传至计算机,其图像信息至少为3张,分别为至少一张俯视图,至少一张主视图和至少一张侧视图;
S12、计算机对图像信息进行处理,以无影灯为原点位置W1建立三维坐标轴,并记录无影灯位置信息;
S13、移动无影灯后,重复步骤S11-S12,记录无影灯新的位置W2。
在进一步的技术方案中,步骤S2的方法如下,
S21、摄影设备记录手术刀的位置D1并将图像信息上传至计算机,其图像信息至少为3张,分别为至少一张俯视图,至少一张主视图和至少一张侧视图;
S22、计算机对图像信息进行处理,在坐标轴内记录手术刀的位置D1;
S23、移动手术刀后,重复步骤S21-S22,记录手术刀新的位置D2。
在进一步的技术方案中,步骤S3的方法如下,
S31、计算机对横向坐标距离a1、纵向坐标距离b1和高度坐标距离c1的信息进行处理;
S32、获取长度信息后,坐标轴三维图内a1、b1、c1的长度乘以预设比例尺信息得到无影灯位置和手术刀位置的实际的横向距离a2、纵向距离b2和高度距离c2;
S33、无影灯或手术刀位置移动后,重复步骤S31-S32,得到新的长度信息。
在进一步的技术方案中,步骤S32预设比例尺的方法如下,
步骤S32预设比例尺的方法如下,
S321、摄影设备获取位于同一平面的任意两点,并将图像信息传递至计算机建立二维坐标轴,得到两点的虚拟长度信息;
S322、用测量仪测量平面上两点的实际长度,得到两点的实际长度信息;
S323、将平面上两点的实际长度信息和计算机生成的二维坐标轴上两点的虚拟长度信息相比,即得到比例尺信息。
在进一步的技术方案中,步骤S4的方法如下,
S41、计算机根据无影灯位置和手术刀位置之间的横向距离a1、纵向距离b1和高度距离c1,通过正余弦定理得到无影灯和手术刀形成的直线与竖直方向的夹角为α1;
S42、根据夹角α1,调整无影灯的角度;
S43、无影灯或手术刀位置发生改变后,重复步骤S41-S42。
上述技术方案的工作原理如下:
计算机三位仿真软件根据获取的图像信息,以无影灯初始所在位置为原点建立三维坐标轴,手术刀所在位置为一坐标,根据向量坐标对数据进行处理,得到手术刀与无影灯构成直线与竖直方向的夹角,即无影灯应偏转使得光线照向手术刀的夹角,当夹角大于45°时,容易出现阴影,移动无影灯的位置直至夹角小于等于45°,当无影灯或手术刀位置发生移动时,坐标轴重新记录无影灯和手术刀的坐标信息,并根据新的坐标信息算出无影灯应偏转的夹角;本发明中利用计算机处理信息,其所用三维仿真软件均为现有技术,例如pro/E、3DMAX等。
本发明的有益效果是:
本发明利用三维坐标轴快速获取目标的向量坐标,利用目标的向量坐标得到所需的夹角和距离数据,确保在手术过程中,无影灯始终追踪手术刀,保证光线充足,同时,防止无影灯偏转夹角过大产生阴影。
附图说明
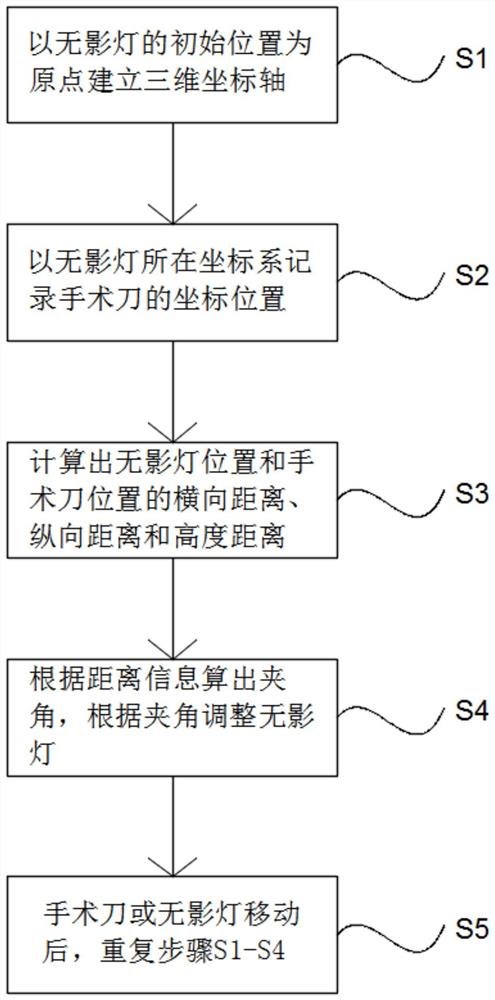
图1是本发明实施例所述具有追踪功能的无影灯的控制方法示意图。
具体实施方式
下面结合附图对本发明的实施例作进一步说明。
实施例:
如图1所示,一种具有追踪功能的无影灯的控制方法,包括以下步骤,
S1、以无影灯所在的初始位置W1为原点,并以其横向方向为X轴,纵向方向为Y轴,高度方向为Z轴,建立坐标轴;
S2、以无影灯所在坐标系记录手术刀的坐标位置D1;
S3、分别计算出无影灯位置W1和手术刀位置D1之间的横向距离a1、纵向距离b1和高度距离c1之间的直线距离;
S4、算出位置W1和位置D1所构成直线与竖直方向的夹角为α,调整无影灯的角度;
S5、手术刀或无影灯移动后,坐标轴记手术刀的位置D2,无影灯的位置W2,重复步骤S2-S4。
在另外一个实施例中,夹角α超过45°时,移动无影灯的位置,记为位置W2,直至位置W2与手术刀位置D2形成的直线与竖直方向的夹角小于等于45°时,停止移动无影灯。
在另外一个实施例中,无影灯的位置和手术刀的位置及无影灯的位置和手术刀的位置构成的直线与竖直方向的夹角均通过计算机中的三维仿真软件处理。
在另外一个实施例中,步骤S1的方法如下,
S11、摄影设备记录无影灯的位置W1并将图像信息上传至计算机,其图像信息至少为3张,分别为至少一张俯视图,至少一张主视图和至少一张侧视图;
S12、计算机对图像信息进行处理,以无影灯为原点位置W1建立三维坐标轴,并记录无影灯位置信息;
S13、移动无影灯后,重复步骤S11-S12,记录无影灯新的位置W2。
在另外一个实施例中,步骤S2的方法如下,
S21、摄影设备记录手术刀的位置D1并将图像信息上传至计算机,其图像信息至少为3张,分别为至少一张俯视图,至少一张主视图和至少一张侧视图;
S22、计算机对图像信息进行处理,在坐标轴内记录手术刀的位置D1;
S23、移动手术刀后,重复步骤S21-S22,记录手术刀新的位置D2。
在另外一个实施例中,步骤S3的方法如下,
S31、计算机对横向坐标距离a1、纵向坐标距离b1和高度坐标距离c1的信息进行处理;
S32、获取长度信息后,坐标轴三维图内a1、b1、c1的长度乘以预设比例尺信息得到无影灯位置和手术刀位置的实际的横向距离a2、纵向距离b2和高度距离c2;
S33、无影灯或手术刀位置移动后,重复步骤S31-S32,得到新的长度信息。
在另外一个实施例中,步骤S32预设比例尺的方法如下,
步骤S32预设比例尺的方法如下,
S321、摄影设备获取位于同一平面的任意两点,并将图像信息传递至计算机建立二维坐标轴,得到两点的虚拟长度信息;
S322、用测量仪测量平面上两点的实际长度,得到两点的实际长度信息;
S323、将平面上两点的实际长度信息和计算机生成的二维坐标轴上两点的虚拟长度信息相比,即得到比例尺信息。
在另外一个实施例中,步骤S4的方法如下,
S41、计算机根据无影灯位置和手术刀位置之间的横向距离a1、纵向距离b1和高度距离c1,通过正余弦定理得到无影灯和手术刀形成的直线与竖直方向的夹角为α1;
S42、根据夹角α1,调整无影灯的角度;
S43、无影灯或手术刀位置发生改变后,重复步骤S41-S42。
本发明技术方案的工作原理如下:
计算机三位仿真软件根据获取的图像信息,以无影灯初始所在位置为原点建立三维坐标轴,手术刀所在位置为一坐标,根据向量坐标对数据进行处理,得到手术刀与无影灯构成直线与竖直方向的夹角,即无影灯应偏转使得光线照向手术刀的夹角,当夹角大于45°时,容易出现阴影,移动无影灯的位置直至夹角小于等于45°,当无影灯或手术刀位置发生移动时,坐标轴重新记录无影灯和手术刀的坐标信息,并根据新的坐标信息算出无影灯应偏转的夹角;本发明中利用计算机处理信息,其所用三维仿真软件均为现有技术,例如pro/E、3DMAX等。
本发明利用三维坐标轴快速获取目标的向量坐标,利用目标的向量坐标得到所需的夹角和距离数据,确保在手术过程中,无影灯始终追踪手术刀,保证光线充足,同时,防止无影灯偏转夹角过大产生阴影。
以上所述实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 一种具有追踪功能的无影灯的控制方法
- 具有眼球追踪功能的电子装置及其控制方法