脚踝辅助外骨骼设备
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及可穿戴设备技术领域,具体地,涉及一种为用户的脚踝提供辅助力可被日常使用的脚踝辅助外骨骼设备。
背景技术
当下,为了不同的目的而设计出了用于下肢的可穿戴设备,其中包括增强人体力量的可穿戴设备、提供康复训练的可穿戴设备、提高移动效率和减少人体能耗的可穿戴设备。为了增强人体力量和康复的目的,可穿戴的下肢设备或外骨骼通常依赖于全腿刚性金属结构来提供外部身体支撑。这些下肢外骨骼系统可以使身体健康的人或身体有残障的人能够执行使用他们自己的力量无法完成的任务。但是,现有的刚性可穿戴设备在配合人体行动和移动效率提高方面存在以下缺陷:(1)因设备关节和无法人体关节在运动之间的对齐失准而导致设备与生物关节之间存在干涉;(2)因设备自由度对少于人体下肢关节的自由度而导致生物关节的运动自由度受到约束;(3)因未被设备本身完全控制和补偿的较大重量和惯量而导致用户在穿戴设备时需要付出额外的能耗带动部分设备。同时较沉重较大的设备结构也使得此类全腿刚性的外骨骼设备很难在日常生活场景中被使用。
目前,有些柔性外骨骼设备利用轻质柔性体材料来制成以减小对生物关节的约束并提供关节助力。此类设备提出了一种给予关节助力的更轻便的解决方案。但是这些柔性外骨骼设备依赖于用户的皮肤表面提供切向力作为为辅助关节助力的反作用力。也就是说,这些设备在一侧向用户的肢体关节提供辅助力,而在另一侧向用户的皮肤表面施加与皮肤表面相切的切向力,这些切向力导致用户的皮肤表面被揉搓、挤压,并因此造成用户不适。而且,当用户的皮肤松弛、肌肉刚度不够从而导致难以提供足够大的切向力作为辅助力的反作用力时,这些设备将不能提供足够的辅助力。
因此,亟需一种能够简易穿戴,不对用户的关节造成约束,在提供下肢辅助的同时不依赖于用户的皮肤表面提供切向力的可穿戴辅助设备,以用于提高用户的日常行动能力和行动效率。
发明内容
为了解决上述现有技术中存在的缺陷中的至少一个,本发明提出了一种脚踝辅助外骨骼设备,其包括:
致动器,其被配置用于穿戴在用户的身体重心较近部位(例如,腰部后方);
下肢支架;以及
拉线,其被配置成在致动器的驱动下向下肢支架可控地施加拉力,其中,
所述下肢支架包括:
被配置成环绕用户的小腿的小腿环;
附接至小腿环并向下延伸的连杆组件;以及
铰接至连杆组件的下端并连接至所述拉线的脚部支架,脚部支架被配置成通过在用户的脚底施加的向上的拉力来带动用户的脚部围绕脚踝关节转动。
根据本发明的一种可行实施方式,所述脚部支架的前方端部被配置成在竖直方向上夹持用户的脚部,脚部支架的后方端部被配置成处于用户脚跟之后,并且后方端部与拉线相连接;所述下肢支架还包括设置在连杆组件的下端和脚部支架之间的扭转弹簧,其被配置用于向脚部支架施加使其前方端部向上抬起的扭矩;以及在脚部支架的前方端部和后方端部之间铰接至脚部支架的脚底拉环,其被配置用于拉住用户的脚底。
根据本发明的一种可行实施方式,脚部支架包括在左右两侧将后方端部与前方端部相连接的一对支架臂,前方端部由所述一对支架臂的支架臂前方端部与附接至其的脚背带构成,脚背带被配置成局部地覆盖用户的脚背。
根据本发明的一种可行实施方式,连杆组件包括设置在脚部支架的左右两侧的一对连杆,所述一对连杆中的每一个的上端分别附接至小腿环的左右两侧,所述一对连杆中的每一个的下端分别铰接至脚部支架。
根据本发明的一种可行实施方式,连杆组件包括在连杆组件的部分高度上将所述一对连杆相连接的支撑块。
根据本发明的一种可行实施方式,所述脚踝辅助外骨骼设备还包括套设在拉线外部的套管,其中拉线可在套管中滑动,套管的上端被固定至致动器,套管的下端被连接至下肢支架。
根据本发明的一种可行实施方式,连杆组件包括在连杆组件的部分高度上将所述一对连杆相连接的支撑块,下肢支架还包括铰接至支撑块的套管支座,其中套管的下端被固定至套管支座。
根据本发明的一种可行实施方式,所述脚踝辅助外骨骼设备还包括一个或多个传感器,所述传感器被配置用于实时检测用户的生物信号以及拉线向脚部支架施加的拉力,所述脚踝辅助外骨骼设备还包括控制器,所述控制器被配置用于利用来自传感器的检测数据来实时控制拉线向脚部支架施加的拉力。
根据本发明的一种可行实施方式,致动器中设置有拉线缠绕在其上的滚轮、被配置用于驱动滚轮旋转的电机以及在电机和滚轮之间传递动力的变速器,并且所述脚踝辅助外骨骼设备还包括被配置成穿戴在用户腰部前方以用于向各个耗电器件供电的电源。
根据本发明的一种可行实施方式,所述脚踝辅助外骨骼设备包括一个致动器、被配置成分别穿戴在用户的左右腿上的、相互独立的两个下肢支架以及分别与所述两个下肢支架相对应的两根拉线。
本发明可以体现为附图中的示意性实施方式。然而,应注意的是,附图仅仅是示意性的,任何在本发明的教导下所设想到的变化都应被视为包括在本发明的范围内,并且本发明的范围仅仅通过所附权利要求来限定。
附图说明
附图示出了本发明的示例性实施方式。这些附图不应被解释为必然地限制本发明的范围。通篇相同的数字和/或类似的附图标记可指相同和/或类似的元件,其中:
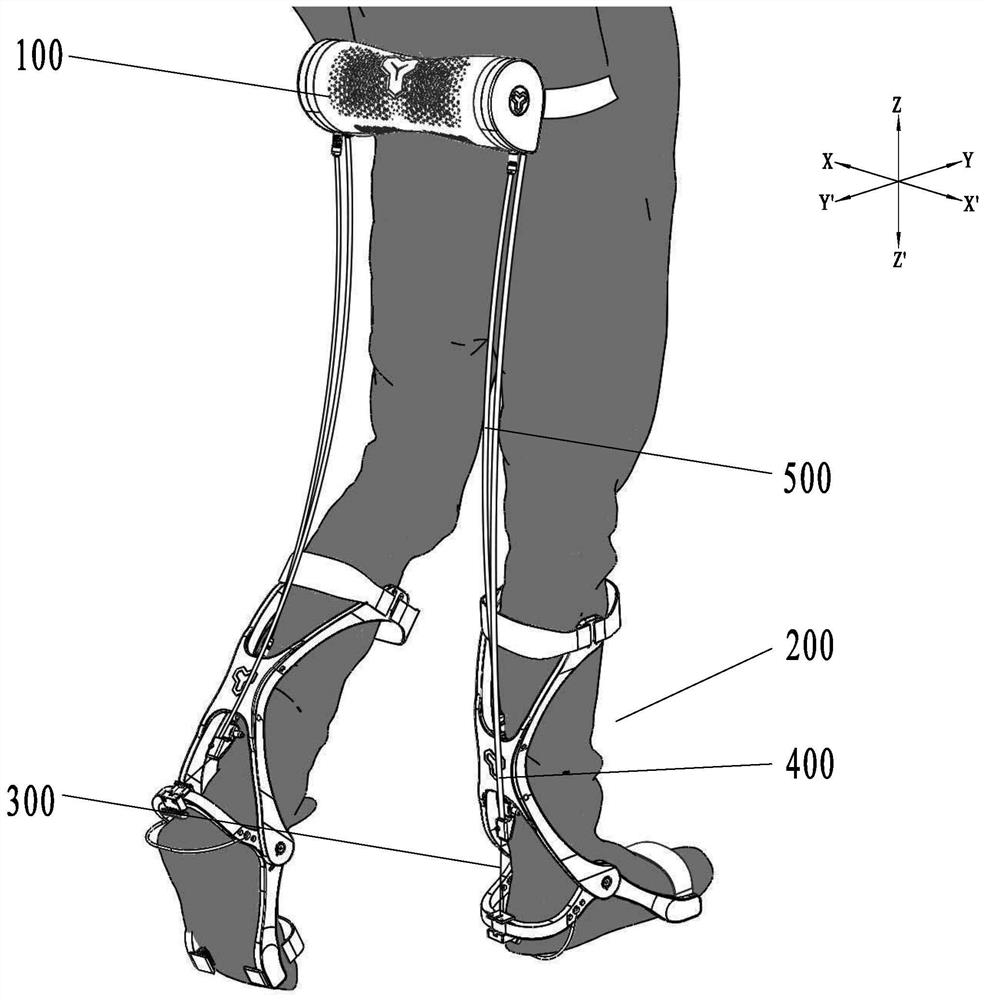
图1是根据本发明的一种可行实施方式的穿戴在用户下肢上的脚踝辅助外骨骼设备的示意性立体图;
图2是图1中所示的穿戴在用户下肢上的脚踝辅助外骨骼设备的示意性局部放大图;
图3是图1-图2中所示的脚踝辅助外骨骼设备的下肢支架的示意性分解立体图;
图4是图1-图3中所示的脚踝辅助外骨骼设备的下肢支架的受力情况示意图;以及
图5是图1-图3中所示的脚踝辅助外骨骼设备的下肢支架的脚部支架的示意性分解立体图;
图6示出了图1-图3中所示的脚踝辅助外骨骼设备中的传感器及微处理器的布置。
具体实施方式
现在参考附图更详细地描述本发明,附图中示出了本发明的示例性实施方式。然而,本发明可以实现为许多不同的形式并且不应解释为必然地限制于这里示出公开的示例性实施方式。相反,这些示例性实施方式仅仅被提供用于说明本发明以及向本领域的技术人员传递本发明的理念。
图1是根据本发明的一种可行实施方式的穿戴在用户下肢上的脚踝辅助外骨骼设备的示意性立体图。图2是图1中所示的穿戴在用户下肢上的脚踝辅助外骨骼设备的示意性局部放大图。图3是图1-图2中所示的脚踝辅助外骨骼设备的下肢支架的示意性分解立体图。图4是图1-图3中所示的脚踝辅助外骨骼设备的下肢支架的受力情况示意图。图5是图1-图3中所示的脚踝辅助外骨骼设备的下肢支架的脚部支架的示意性分解立体图。图6示出了图1-图3中所示的脚踝辅助外骨骼设备中的传感器及微处理器的布置。为了使得本发明的可行实施方式的下面的说明能够更易于理解,在各个视图中,以箭头ZZ’示出了竖直方向,以箭头YY’示出了前后方向,以箭头XX’示出了横向方向。所谓前后方向YY’可理解为穿戴本脚踝辅助外骨骼设备的用户的前后方向,其涵盖了指向该用户所面向的方向的前方Y和指向该用户所背对的方向的后方Y’。所谓竖直方向ZZ’可理解为穿戴本脚踝辅助外骨骼设备的用户的身高方向,其涵盖了上方Z和下方Z’。所谓横向方向XX’可理解为穿戴本脚踝辅助外骨骼设备的用户的左右方向,其涵盖了指向该用户的左手侧的左侧方向X和指向该用户的右手侧的右侧方向X’。另外,任何垂直于竖直方向ZZ’的方向都可理解为水平方向。值得的注意的是,上述关于方位的定义仅仅是出于更好地说明本发明的技术方案的目的而提供的,其不应以任何方式解释成是对本发明的限制。
参考图1至图3,根据本发明的脚踝辅助外骨骼设备包括:致动器100,其被配置用于穿戴在用户的腰部后方;下肢支架200;以及拉线300,其被配置成在致动器100的驱动下向下肢支架200可控地施加拉力。进一步地,所述下肢支架200包括:被配置成环绕用户的小腿的小腿环(例如,由针织物制成)210;脚部支架230,脚部支架230的前方端部232被配置成在竖直方向上夹持用户的脚部,脚部支架230的后方端部231被配置成处于用户脚跟之后,并且后方端部231与拉线300相连接;设置在小腿环210和脚部支架230之间的连杆组件220,其中连杆组件220的上端(例如通过可拆开的粘扣、魔术贴等)附接至小腿环210,连杆组件220的下端在脚部支架230的前方端部232和后方端部231之间铰接至脚部支架230(以使得脚部支架230可围绕一横向轴线相对于连杆组件220旋转);设置在连杆组件220的下端和脚部支架230之间的扭转弹簧260,其被配置用于向脚部支架230施加使其前方端部232向上抬起的扭矩;以及在脚部支架230的前方端部232和后方端部231之间铰接至脚部支架230的脚底拉环250(以使得脚底拉环250可围绕一横向轴线相对于脚部支架230旋转),其被配置用于拉住(或者,勾住)用户的脚底(例如,脚跟)。
根据上述本发明的技术方案,当用户穿戴根据本发明的脚踝辅助外骨骼设备时,其仅仅覆盖用户的肢体(尤其是关节)的一小部分(肢体表面积的25%以下),因此不会对用户的关节的运动造成任何限制。特别地,由于小腿环210被配置成环绕用户的小腿而非膝关节,所以本脚踝辅助外骨骼设备仅仅局部地覆盖其所助力的脚踝关节,而对于其未助力的其他关节(例如膝关节)不会产生任何约束和阻碍。进一步地,参考图4,当本脚踝辅助外骨骼设备工作时,致动器100通过拉线300向脚部支架230的后方端部231施加拉力F,而拉力F会向脚部支架230施加使脚部支架230的后方端部231向上、脚部支架230的前方端部232向下的拉线扭矩;当拉线扭矩大于扭转弹簧260所施加的弹簧扭矩时,后方端部231通过脚底拉环250向脚底(特别地,脚跟)施加向上的拉力F2(垂直于脚底的皮肤表面的法向力),以辅助脚踝进行跖曲(也被称为跖屈)运动。值得一提的是,由于进行跖曲运动时,用户的前脚掌抵靠地面,因此,在拉力F2的作用下,前方端部232会向地面施加作用力F3,而不会向用户脚面施加较大的压力,从而不会造成用户不适;当拉线扭矩小于扭转弹簧260所施加的弹簧扭矩时,脚部支架230的前方端部232将向脚底施加向上的垂直于脚底表面的法向力F3’,以辅助脚踝进行背曲(也被称为背屈)运动;而无论何时,连杆组件220都只会受到令其围绕脚部支架230旋转的扭矩,因此,连杆组件220只会通过小腿环210向用户的小腿施加垂直于小腿的皮肤表面的法向力F1、F1’,而这也使得小腿环210可以仅仅与小腿局部地接触而无需抱紧小腿,从而提高了用户的舒适性。因此,本脚踝辅助外骨骼设备在工作时与所接触的用户的皮肤表面之间仅仅会产生垂直于皮肤表面的法向力(F1、F1’、F2、F3’),而不会向所接触的用户的皮肤表面施加与其相切的切向力,因此,本脚踝辅助外骨骼设备不会引起皮肤的摩擦和切向挤压从而导致用户不适,并且能够不受用户的皮肤松弛度和肌肉强度的影响而提供足够的辅助力。另外,由于法向力F1、F1’的力臂S1较大,辅助力F3’的力臂S3较小,因此,法向力F1、F1’较小,辅助力F3’较大。所以,用户的小腿所受到的反作用力较小,但是脚部受到的辅助力较大,这进一步提高了用户利用本脚踝辅助外骨骼设备进行脚踝辅助时的舒适性和有效性。
参考图1-图3以及图5,根据本发明的一种可行实施方式,脚部支架230与脚底拉环250相铰接的位置处于脚部支架230与连杆组件220相铰接的位置和后方端部231之间。
参考图1-图3以及图5,根据本发明的一种可行实施方式,脚部支架230包括在左右两侧将后方端部231与前方端部232相连接的一对支架臂233、234(即,左侧支架臂233和右侧支架臂234),前方端部232由所述一对支架臂233、234的支架臂前方端部2331、2341与(例如通过可拆开的粘扣、魔术贴等)附接至其的脚背带235构成,脚背带235被配置成局部地覆盖用户的脚背。
因此,参考图4,根据上述实施方式,当拉线300所施加的拉线扭矩小于扭转弹簧260所施加的弹簧扭矩时,支架臂前方端部2331、2341将向脚底施加向上的垂直于脚底表面的法向力F3’,以辅助脚踝进行背曲运动。
参考图5,根据本发明的一种可行实施方式,所述一对支架臂233、234的支架臂前方端部2331、2341在其底部处包括朝向彼此延伸的突出部2332、2342。
因此,参考图4,根据上述实施方式,当拉线300所施加的拉线扭矩小于扭转弹簧260所施加的弹簧扭矩时,突出部2332、2342将向脚底施加向上的垂直于脚底表面的法向力F3’,以辅助脚踝进行背曲(也被称为背屈)运动,并且由于突出部2332、2342与用户的脚底进行面接触,所以在力F3’较大时也不会引起用户的脚底不适。
参考图1-图3以及图5,根据本发明的一种可行实施方式,所述一对支架臂233、234连同后方端部231一起呈U形并且被配置成在水平方向上(至少部分地)环绕用户的脚部。
参考图5,根据本发明的一种可行实施方式,所述一对支架臂233、234包括多组铰接孔,其中每组铰接孔包括在横向方向上相对地设置在所述一对支架臂233、234上的两个铰接孔2333、2343,脚底拉环250在所述多组铰接孔中的一组铰接孔处铰接至所述一对支架臂233、234。
因此,根据上述实施方式,脚底拉环250铰接至脚部支架230的位置可具有多种选择,以更好地匹配用户的脚部,从而使得本脚踝辅助外骨骼设备可以更加高效、更加可靠地为用户提供辅助力。
仍然参考图5,根据本发明的一种可行实施方式,所述一对支架臂233、234包括至少三组铰接孔。
参考图1-图3,根据本发明的一种可行实施方式,连杆组件220包括设置在脚部支架230的左右两侧的一对连杆221、222(即,左侧连杆221和右侧连杆222),所述一对连杆221、222中的每一个的上端分别附接至小腿环210的左右两侧,所述一对连杆221、222中的每一个的下端分别铰接至脚部支架230。具体地,左侧连杆221铰接至左侧支架臂233,右侧连杆222铰接至右侧支架臂234。
因此,根据上述实施方式,小腿环210和脚部支架230仅仅通过一对连杆221、222相连接,这极大地减轻了下肢支架200的重量,并进一步减小了用户肢体被覆盖的面积,从而使得用户穿戴本脚踝辅助外骨骼设备时的体力消耗被最小化,并且使得舒适感得到进一步提升。
参考图1-图3,根据本发明的一种可行实施方式,连杆组件220包括在连杆组件220的部分高度上将所述一对连杆221、222相连接的支撑块223。虽然图中示出了,支撑块223在连杆组件220的竖直方向上的中部处将所述一对连杆221、222相连接。但是,可以理解的是,支撑块223的高度位置是可变的,例如可以在连杆组件220的竖直方向上的中部上方或者下方,因此,支撑块223的任意高度位置都应被视为包括在本发明的范围中。
因此,根据上述实施方式,由于支撑块223的存在,连杆组件220的结构更加稳定并因此能够更加可靠地支撑下肢支架200,并且由于支撑块223仅仅在连杆组件220的部分高度上存在,因此支撑块223并未显著增加连杆组件220的重量。
参考图2及图3,根据本发明的一种可行实施方式,本脚踝辅助外骨骼设备还包括套设在拉线300外部的套管400,其中拉线300可在套管400中滑动,套管400的上端被固定至致动器100,套管400的下端被连接至下肢支架200。特别地,拉线300和套管400构成鲍登拉线(Bowden Cable)。
因此,根据上述实施方式,可以利用套管400来在致动器100和下肢支架200之间引导拉线300,从而使得致动器100能够更加高效地、更加可靠地通过拉线300向下肢支架200施加拉力,而这使得本脚踝辅助外骨骼设备可以更加高效、更加可靠地为用户提供辅助力。
参考图2及图3,根据本发明的一种可行实施方式,下肢支架200还包括铰接至支撑块223的套管支座270(以使得套管支座270可围绕一横向轴线相对于支撑块223旋转),其中套管400的下端被固定至套管支座270。
因此,根据上述实施方式,套管400的下端可随着套管支座270一起相对于支撑块223旋转,这使得套管400的下端的角度位置可随着用户脚部的运动而变化,以使得拉线300从套管400的下端出来的方向始终朝向被其拉动的脚部支架230的后方端部231。换言之,套管400的下端始终朝向脚部支架230的后方端部231引导拉线300,而不会在横向于拉线300的延伸方向的方向上施加任何阻碍,从而使得致动器100能够更加高效地、更加可靠地通过拉线300向下肢支架200施加拉力,而这使得本脚踝辅助外骨骼设备可以更加高效、更加可靠地为用户提供辅助力。
根据本发明的一种可行实施方式,本脚踝辅助外骨骼设备还包括一个或多个传感器(例如IMU(惯性测量单元)传感器、EMG(肌电图)传感器、力传感器等),其被配置用于实时检测用户的生物信号(例如,脚部运动、脚部角度、脚部加速度、腿部运动、腿部角度、腿部加速度、肌肉活动等)以及拉线300向脚部支架200施加的拉力,本脚踝辅助外骨骼设备还包括控制器(例如,微处理器),所述控制器被配置用于利用来自传感器的检测数据来实时控制拉线300向脚部支架200施加的拉力。
因此,根据上述实施方式,本脚踝辅助外骨骼设备利用传感器实时检测用户的生物信号(例如,脚部运动、脚部角度、脚部加速度、腿部运动、腿部角度、腿部加速度、肌肉活动等),然后,控制器可以利用检测到的数据判断出用户正在以及将要进行的运动模式(例如,用户将要站住、行走、跑步等)以及用户的脚部正在以及将要进行的动作(例如,屈曲运动、跖曲运动),然后控制器进一步利用检测到的拉线300向脚部支架200施加的拉力来对该拉力进行闭环控制,以实时地、精确地、前瞻性地对用户的脚踝进行辅助。因此,无论用户正在以及将要进行的运动模式(例如,用户将要站住、行走、跑步等)如何并且无论用户的脚部正在以及将要进行的动作(例如,屈曲运动、跖曲运动)如何,本脚踝辅助外骨骼设备都可实时地、精确地、前瞻性地对用户的脚踝进行辅助。
参考图6,根据本发明的一种可行实施方式,本脚踝辅助外骨骼设备包括设置在小腿环210的后部的EMG传感器610、设置在支撑块223中的IMU传感器620和微处理器630、设置在套管支座270上的力传感器640以及设置在脚部支架230上的IMU传感器650。并且,本脚踝辅助外骨骼设备还包括电路信号线500,电路信号线500被配置用于在致动器100和各个传感器以及微处理器之间传递数据和电力。
因此,根据上述实施方式,在通过电路信号线500从致动器100获得电力的情况下,首先通过EMG传感器610测量用户小腿的生物信号、通过IMU传感器620测量用户小腿的惯性信号、通过IMU传感器650测量用户脚部的惯性信号、并通过力传感器640测量拉线300的拉力,然后微处理器630能够利用上述各个传感器输出的数据来预测用户的动作并进一步闭环控制拉线300的拉力,从而实时地、精确地、前瞻性地对用户的脚踝进行辅助。然而,值得注意的是,上述各个传感器以及微处理器的位置仅仅是示例性的,在不影响其功能的情况下,其具体位置可变。例如,微处理器630可设置于致动器100中,EMG传感器610可设置于连杆组件220上。
根据本发明的一种可行实施方式,致动器100中设置有拉线300缠绕在其上的滚轮、被配置用于驱动滚轮旋转并受控制器控制的电机以及在电机和滚轮之间传递动力的变速器,并且本脚踝辅助外骨骼设备还包括被配置成穿戴在用户腰部前方以用于向各个耗电器件供电的电源。
因此,根据上述实施方式,本脚踝辅助外骨骼设备的较重的部件(例如,电机、电源、变速器等)均被设置在用户的腰部上,也就是说,本脚踝辅助外骨骼设备的大部分重量都集中在用户的腰部上,而非集中在用户的下肢上,这使得用户穿戴本脚踝辅助外骨骼设备时的体力消耗被进一步减小,从而提高用户穿戴的舒适度,使得用户可以长时间穿戴本脚踝辅助外骨骼设备来辅助脚踝进行运动;并且由于电源处于腰部前方,而电机、变速器等处于腰部后方,因此电源与电机、变速器等可以互为配重,这进一步改善了用户穿戴本脚踝辅助外骨骼设备时的舒适性。
参考图1及图2,根据本发明的一种可行实施方式,本脚踝辅助外骨骼设备包括一个致动器100、被配置成分别穿戴在用户的左右腿上的、相互独立的两个下肢支架200以及分别与所述两个下肢支架200相对应的两根拉线300。
因此,根据上述实施方式,当用户的一个脚踝需要辅助时,用户可以仅穿戴一个下肢支架200以辅助该脚踝进行运动;当用户的两个脚踝都需要辅助时,用户可以穿戴相互独立的两个下肢支架200,以同时辅助两个脚踝进行运动,这极大地提高了本脚踝辅助外骨骼设备使用的灵活性。
以上借助于附图详细描述了根据本发明的脚踝辅助外骨骼设备的优选但非限制性的实施方式。对于本领域内的那些普通技术人员来说,在不偏离如下面的权利要求所阐述的本公开的范围和实质的情况下,对技术和结构的修改和补充显然都应视为包括在本发明的范围内。因此,在本发明的教导下所能设想到的这些修改和补充都应被视为本公开的一部分。本公开的范围通过以下所附的权利要求限定,并且包括在本公开的申请日时已知的等效技术和尚未预见的等效技术。
- 脚踝辅助外骨骼设备
- 外骨骼辅助下的步态识别方法、介质和设备