一种网联线控底盘车辆综合运动预测方法
文献发布时间:2023-06-19 10:58:46
技术领域
本发明属于智能车决策技术领域,具体指代一种网联线控底盘车辆综合运动预测方法。
背景技术
智能网联汽车是如今的研究热点,智能网联汽车的关键技术主要包括:周围车辆的运动预测、智能网联汽车决策以及车辆控制等三部分。因此,想要实现无人驾驶,首先要能够对周围交通有很好的理解,预测出周围车辆的未来运动行为。
目前,周围车辆运动预测的方法主要有基于驾驶员意图的预测和基于车辆状态的预测。驾驶员意图表示驾驶员在采取驾驶行为之前的行为偏好,其结果对车辆运动有直接的影响,主要可用车辆内部信息如油门踏板压力、制动踏板压力和方向盘转角等,或车辆外部信息如车辆速度、侧向位移,距离等进行预测。而基于车辆状态的预测则是通过车辆当前的状态对车辆未来运动进行预测。车辆的运动一方面由驾驶员控制,另一方面,由于车辆运动的变化是连续性的因此车辆的运动也和车辆的状态有关,也就是说,车辆的未来运动由驾驶员的意图和车辆的状态共同决定。然而,虽然在驾驶员意图预测和车辆行为预测方面有很多的研究者进行了深入研究,但这些研究要么关注驾驶员的意图,要么关注车辆的行为状态,很少有研究人员将两者综合考虑,这会导致预测结果不准确,无法同时满足驾驶员驾驶目的和车辆运动连续性的要求。
发明内容
针对于上述现有技术的不足,本发明的目的在于提供一种网联线控底盘车辆综合运动预测方法,其将驾驶员意图预测和车辆行为识别融合在一起,以解决现有技术中仅考虑驾驶员意图或车辆状态导致的预测结果不准确的问题。
为达到上述目的,本发明采用的技术方案如下:
本发明的一种网联线控底盘车辆综合运动预测方法,步骤如下:
步骤1:获取周围车辆当前的状态信息和周围环境的信息;
步骤2:对所有周围车辆建立驾驶行为集M={LCL LK LCR},LCL表示车辆左换道,LK表示车辆保持车道行驶,LCR表示车辆右换道;
步骤3:根据上述周围环境信息和驾驶行为集,采用博弈论方法对周围车辆驾驶员意图进行预测,得到周围车辆驾驶意图预测概率P
步骤4:根据上述周围车辆当前的状态信息和驾驶行为集,对周围车辆进行行为识别,得到周围车辆行为识别概率P
步骤5:通过得到的周围车辆驾驶意图预测概率P
步骤6:以轨迹误差为目标函数,通过纳什-优化的方法将上述两个轨迹融合,得到周围车辆运动的综合预测轨迹T(t)。
优选的,所述步骤1中的周围车辆当前的状态信息包括车辆位置、速度;周围环境信息包括车道中心线位置、车道宽度、车道速度限制。
优选的,所述步骤3具体包括:
3.1建立收益函数,具体为:
式中,TTC为碰撞时间,TH为车头时距,v
TTC、TH、d具体为:
式中,x
3.2计算出每一驾驶意图对应的收益:
式中,m
3.3计算出驾驶意图预测概率:
式中,
各概率具体为:
优选的,所述步骤4中采用交互多模型算法对车辆进行运动识别,具体为:
4.1建立车道模型,车道模型服从正态分布:
式中,k表示第k个车道,
4.2车辆在t时刻的模型转移矩阵π
式中,下标k,j为车道序号,
φ具体为:
4.3通过t-1时刻的行为识别概率
优选的,所述步骤5中采用三次多项式进行轨迹规划,具体为:
5.1轨迹规划方程和边界条件为:
式中,(x
5.2得到周围车辆驾驶员意图预测轨迹T
η
And
η
式中,T
优选的,所述步骤6具体为:
6.1得到综合预测轨迹:
η(t+i)=λ
式中,λ
6.2建立目标函数,具体为:
6.3采用纳什-优化方法对λ
η(t+i)=λ
And
η(t+i)=λ
6.4得到优化后的综合预测轨迹:
本发明的有益效果:
本发明通过纳什-优化的方法将驾驶员意图预测和车辆行为识别进行融合,得到周围车辆运动的综合预测结果,解决了目前的研究中仅考虑驾驶员意图或车辆当前状态导致的预测结果无法同时满足驾驶员目的和车辆状态连续性的问题,提高了对周围车辆运动预测的准确性和合理性。
附图说明
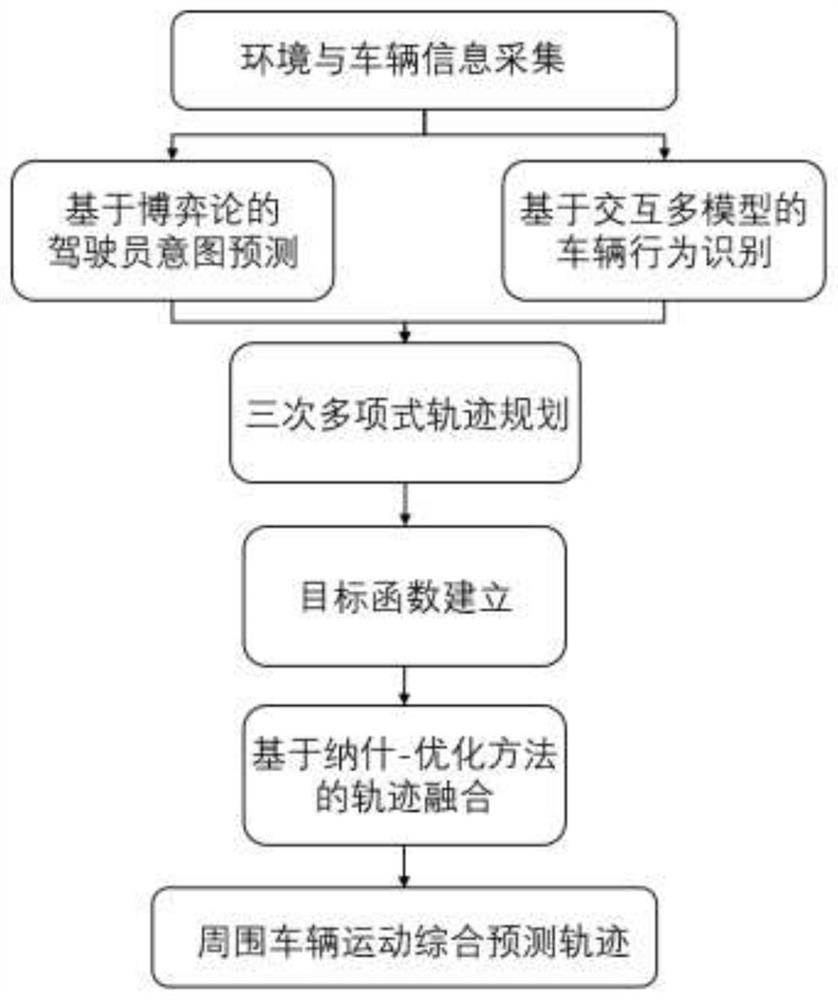
图1为本发明方法的流程图。
图2为本发明轨迹融合示意图。
具体实施方式
为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
参照图1所示,本发明的一种网联线控底盘车辆综合运动预测方法,步骤如下:
步骤1:获取周围车辆当前的状态信息和周围环境的信息;
所述步骤1中的周围车辆当前的状态信息包括车辆位置、速度等;周围环境信息包括车道中心线位置、车道宽度、车道速度限制等信息。
步骤2:对所有周围车辆建立驾驶行为集M={LCLLKLCR},LCL表示车辆左换道,LK表示车辆保持车道行驶,LCR表示车辆右换道;
步骤3:根据上述周围环境信息和驾驶行为集,采用博弈论方法对周围车辆驾驶员意图进行预测,得到周围车辆驾驶意图预测概率P
3.1建立收益函数,具体为:
式中,TTC为碰撞时间,TH为车头时距,v
TTC、TH、d具体为:
式中,x
3.2计算出每一驾驶意图对应的收益:
式中,m
3.3计算出驾驶意图预测概率:
式中,
各概率具体为:
步骤4:根据上述周围车辆当前的状态信息和驾驶行为集,对周围车辆进行行为识别,得到周围车辆行为识别概率P
采用交互多模型算法对车辆进行运动识别,具体为:
4.1建立车道模型,车道模型服从正态分布:
式中,k表示第k个车道,
4.2车辆在t时刻的模型转移矩阵π
式中,下标k,j为车道序号,
φ具体为:
4.3通过t-1时刻的行为识别概率
步骤5:通过得到的周围车辆驾驶意图预测概率P
采用三次多项式进行轨迹规划,具体为:
5.1轨迹规划方程和边界条件为:
式中,(x
5.2得到周围车辆驾驶员意图预测轨迹T
η
And
η
式中,T
步骤6:以轨迹误差为目标函数,通过纳什-优化的方法将上述两个轨迹融合,得到周围车辆运动的综合预测轨迹T(t);参照图2所示;
6.1得到综合预测轨迹:
η(t+i)=λ
式中,λ
6.2建立目标函数,具体为:
6.3采用纳什-优化方法对λ
η(t+i)=λ
And
η(t+i)=λ
6.4得到优化后的综合预测轨迹:
本发明具体应用途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,这些改进也应视为本发明的保护范围。
- 一种网联线控底盘车辆综合运动预测方法
- 一种智能网联测试装备线控底盘系统