一种新型化妆品粉盒组合包装设备
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及化妆品包装技术领域,特别是一种新型化妆品粉盒组合包装设备。
背景技术
粉饼,由多种粉体原料(包括颜料)及黏合剂(油脂成分)经混合、压制而成的饼状固体美容制品,具有遮盖、附着、涂展、赋色、修饰的功能,粉饼造就轻柔的哑光质感,粉饼的魅力在于滑爽、轻盈的触感,通常粉饼都装在配套的粉盒内,小巧的粉盒,既便于外出携带,使用起来也方便。
在化妆品的粉饼包装生产线上,当粉饼生产完成后通常都会按次序装在托盘内,然后再将一摞摞装满粉饼的托盘运送到装盒的工序,就是说将托盘内的粉饼一个个的摆好角度放置到粉盒中,现有的生产工序通常采用人工放置,但这种方式效率低下,而且粉饼入盒的角度得不到统一,影响产品美观,因此需要研发一种包装设备。
发明内容
本发明的目的是为了解决上述问题,设计了一种新型化妆品粉盒组合包装设备。
实现上述目的本发明的技术方案为,一种新型化妆品粉盒组合包装设备,包括机台和设置于机台外侧的机柜,其还包括:
载物升降机构,设置于所述机柜的内部用于负载化妆品粉饼并通过升降的方式将其传递到指定位置;
吸取上料搬运机构,安装在所述机柜的上部用于将载物升降机构上的化妆品粉饼吸取搬运到下一道工序;
5号并联机器人,安装在所述机台的上部用于将化妆品粉饼搬运到指定位置;
6号Scara机器人,安装在所述机台上用于将化妆品粉饼吸取搬运到化妆品粉盒中;
所述机台上还设置有粉饼传送装置、缓冲料仓轨道和多个视觉相机组件。
作为本发明的进一步描述,所述载物升降机构设有两个,且呈竖向平行设置,所述载物升降机构包括升降装置和载物台,所述载物台安装在所述升降装置上。
作为本发明的进一步描述,所述吸取上料搬运机构包括设置于所述机柜上的线轨和导轨、安装在线轨和导轨上的基座、安装在基座上的导轨、线轨和上料搬运组件,其中所述上料搬运组件和安装在基座上的导轨和线轨滑动连接,安装在机柜上导轨的一端以及安装在基座上导轨的两端都分别设置有限位件。
作为本发明的进一步描述,所述粉饼传送装置和其中一个所述载物升降机构处于同一轴线上,所述粉饼传送装置与所述缓冲料仓轨道平行。
作为本发明的进一步描述,所述视觉相机组件设有三个,其中有一个所述视觉相机组件位于所述5号并联机器人的旁边,并正对着所述粉饼传送装置,有一个位于所述缓冲料仓轨道的上方,并正对着所述缓冲料仓轨道的端部。
作为本发明的进一步描述,所述机架的外侧还设置有粉盒传送台,所述粉盒传送台与所述粉饼传送装置和所述缓冲料仓轨道垂直。
作为本发明的进一步描述,所述缓冲料仓轨道的端部还设置有传感器,所述视觉相机组件位于所述粉盒传送台的上方,所述视觉相机组件在所述粉盒传送台上的投影和所述缓冲料仓轨道处于同一直线上。
作为本发明的进一步描述,所述5号并联机器人包括多方位移动组件和安装在多方位移动组件端部的旋转吸盘组件。
作为本发明的进一步描述,所述6号Scara机器人包括移动机械臂以及安装在移动机械臂端部的旋转吸盘组件。
其有益效果在于,本发明提供的粉饼包装设备自动化程度高,吸取上料搬运机构将载物升降机构上的粉饼按次序放到粉饼传输装置上,当粉饼传送到指定位置后由5号并联机器人将粉饼吸取搬运到缓冲料仓轨道上,粉盒传送台用于传送粉盒,传感器用于感应粉盒的位置,然后6号Scara机器人会将粉饼吸取并旋转调整角度后放到粉盒内,而视觉相机组件会检测粉饼的位置和角度,整套设备的包装操作完全不需要人工,可以极大提高工作效率,减少人工成本,粉饼入盒的角度是统一的,因此具有很强的推广和应用价值。
附图说明
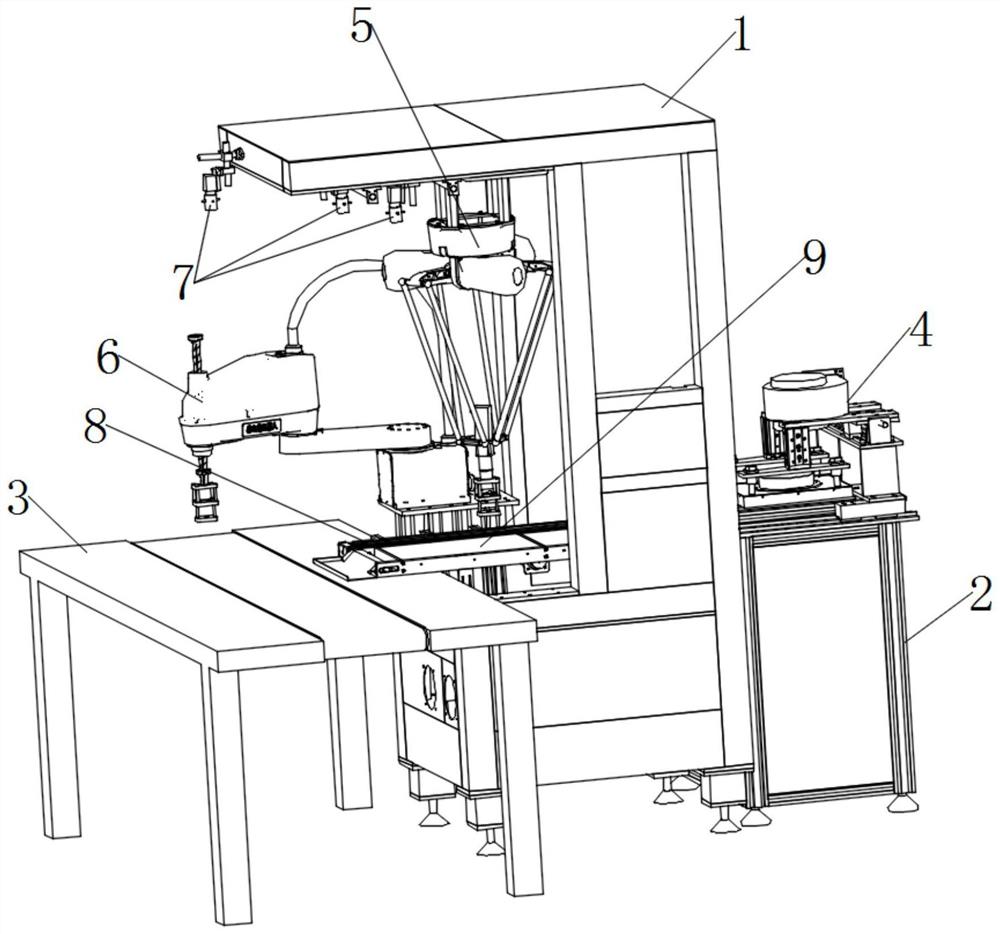
图1是本发明的结构示意图;
图2是本发明所述的机柜及安装在机柜上各组件的结构示意图;
图3是本发明所述的机台及安装在机台上各组件的结构示意图;
图4是图3的另一视角结构示意图。
图中,1、机台;2、机柜;3、粉盒传送台;4、吸取上料搬运机构;5、5号并联机器人;501、多方位移动组件;6、6号Scara机器人;601、移动机械臂;7、视觉相机组件;8、缓冲料仓轨道;9、粉饼传送装置;10、载物升降机构;1001、升降装置;1002、载物台;11、线轨;12、上料搬运组件;13、导轨;14、限位件;15、基座;16、旋转吸盘组件;17、传感器。
具体实施方式
首先说明一下本发明的设计初衷,粉饼的表面有很多纹路,为了包装的统一性,在包装的过程中需要校准角度,然后再将粉饼放入粉盒内,一般都是通过人工完成的,这就可能导致粉饼入盒的角度不统一,影响美观,后续销售也会产生影响,因此需要研发一款包装设备来改善这种状况,为此本发明提供了一种新型化妆品粉盒组合包装设备。
下面结合附图对本发明进行具体描述,如图1-4所示,该设备主要包括机台1、设置于机台1外侧的机柜2和粉盒传送台3,其中在机柜2的内部设置有两个载物升降机构10,它的作用就是用于负载化妆品粉饼并通过升降的方式将其传递到指定位置,而在机柜2的上部设置有吸取上料搬运机构4,它的作用就是将载物升降机构10上的粉饼吸取并搬运到下一道工序;在机台1上设置有粉饼传送装置9和缓冲料仓轨道8,都是用于传送粉饼的,其中在机台1的上部、位于粉饼传送装置9的上方设置有5号并联机器人5,它用于将粉饼传送装置9上的粉饼吸取搬运到缓冲料仓轨道8上,而在粉饼传送带的旁边设置有6号Scara机器人6,5号并联机器人5与6号Scara机器人6是互相协作的,5号并联机器人5负责将粉饼从粉饼传送装置9的抓取区域取出后放到缓冲料仓轨道8内,6号Scara机器人6负责将粉饼从缓冲料仓轨道8内取出,放到粉盒内;其中上述的缓冲料仓轨道的设计目的是为了应对当前粉饼取完后,下个流进粉饼输送装置9待取区域的空闲时间内,5号并联机器人5还有粉饼可以抓取,才能保证粉饼的装盒作业不漏料。
为了能实时监控粉饼的位置和放置角度,在机台1上还设置有三个视觉相机组件7,一个位于5号并联机器人5的旁边,它用于辅助5号并联机器人抓取粉饼位置的视觉辩识,一个位于缓冲料仓轨道8端部的上方,它用于辅助6号Scara机器人作粉饼的角度方向判别,最后一个位于视觉相机组件7在粉盒传送台3上的投影和缓冲料仓轨道8在同一轴线上,用于辅助6号Scara机器人作粉盒传送台上移动粉盒的位置角度辩识。
接下来分别对上述机构和组件进行说明:
机柜2会和粉饼的生产线对接,粉饼加工成型后会放在托盘内,然后托盘会放置到载物升降机构10上,两个载物升降机构10是呈竖向平行设置的,一个用于装载盛满粉饼的托盘,是粉饼抓取区,一个用于装载空的托盘,是空托盘的摆放区;载物升降机构10包括升降装置1001和载物台1002,其中载物台1002安装在升降装置1001上,升降装置1001可带动载物台1002升降;托盘内的粉饼通过吸取上料搬运机构4搬运到粉饼传送装置9上,吸取上料搬运机构4由线轨11、导轨13、基座15、上料搬运组件12等部件组成,其中线轨11安装在机柜2上部的两端,导轨13安装在机柜2上部的中间,基座15与线轨11和导轨13滑动连接,而在基座15的上部也安装了导轨13,上料搬运组件12安装在基座15上并与基座15上的导轨13滑动连接,而上料搬运组件12是通过风管与鼓风机连接的,鼓风机工作时,上料搬运组件12会将整盘粉饼从堆叠的托盘中取到粉饼传送装置9上,基座15整体沿着导轨13和线轨11滑动,上料搬运组件12会将粉饼放置到粉饼传送装置9上,待粉饼传送装置9将粉饼传送到待抓取位置时由5号并联机器人5抓取;托盘内的粉饼抓取完后上料搬运组件12会回归原位将托盘吸取,沿着基座15上的导轨13滑动,将空的托盘放置到另一个载物升降机构10上堆叠,以此往复作业;为了防止基座15和上料搬运组件12滑出导轨13,在机柜2上导轨13的一端以及安装在基座15上导轨13的两端都分别设置有限位件14。
位于5号并联机器人5的旁边、粉饼传送装置9上方的视觉相机组件7会监控粉饼传送装置9上粉饼的位置,5号并联机器人5包括多方位移动组件501和安装在多方位移动组件501端部的旋转吸盘组件16,多方位移动组件501会带动旋转吸盘组件16任意移动;当视觉相机组件7监控到粉饼到达指定位置时,5号并联机器人5会将粉饼一个个吸取,然后通过旋转吸盘组件16旋转一下粉饼,调整角度,搬运到缓冲料仓轨道8上,其中粉饼传送装置9和缓冲料仓轨道8是平行的,粉饼单道传送装置上方的视觉相机组件7会监控粉饼传送带上粉饼的位置以及粉饼上花纹的角度,当粉饼到达指定位置时,6号Scara机器人6会将粉饼吸取放置到粉盒传送台3上面的粉盒内,6号Scara机器人6包括移动机械臂601以及安装在移动机械臂601端部的旋转吸盘组件16,在放置时6号Scara机器人6的旋转吸盘组件16会再一次旋转调整粉饼的角度,而粉盒传送台3与粉饼传送装置9和缓冲料仓轨道8是垂直的,为了能实时监控粉盒传送台3上粉盒的位置信息,在缓冲料仓轨道8的端部还设置有传感器17,传感器17和粉盒传送台3上方的视觉相机组件7会共同监控粉盒的位置,6号Scara机器人6将粉饼吸取调整角度后会放置到粉盒内,确保每一个入盒的粉饼角度是一致的。
上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
- 一种新型化妆品粉盒组合包装设备
- 一种新型的化妆品用包装设备