一种适用水下回收过程的超短组合导航方法
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及水下机器人对接回收过程中的导航技术领域,尤其涉及自主水下机器人(简称AUV)水下对接回收过程的超短组合导航方法,实现自主水下机器人水下平台对接回收过程中的超短组合导航定位。
背景技术
在海洋工程、深海科考过程中,自主水下机器人得到广泛应用。尤其在极端海洋环境下,例如深渊或极地海域等,自主水下机器人发挥越来越重要的作用。在水面船活动受限区域,例如极区浮冰覆盖水域,发展基于水面船水下对接回收平台的自主水下机器人回收技术是推动自主水下机器人特殊环境应用的关键技术。在自主水下机器人回收过程中,尤其是冰下回收自主水下机器人,自主水下机器人基于超短基线的组合导航算法的作用实时计算自主水下机器人的大地系导航位置、母船坐标系的相对位置,该位置是自主水下机器人估计与母船位置关系,引导自主水下机器人水下回收的关键控制输入量。所以发展研究水下回收过程中的基于超短基线的自主水下机器人组合导航技术是十分必要的。基于超短基线的自主水下机器人组合导航技术,需要水面船通过水声通信机向自主水下机器人传输超短定位信息,而水声信道传输数据存在丢包和乱序的风险,而传统基于超短基线的自主水下机器人组合导航技术只能利用当前时刻的超短定位,无法利用历史时刻和乱序到达的超短定位,所以传统方法存在超短数据利用率低,实时导航精度提升空间有限的问题。
发明内容
本发明涉及水下机器人对接回收过程中的导航技术领域,尤其涉及自主水下机器人(简称AUV)水下对接回收过程的超短组合导航方法。针对自主水下机器人超短数据定位数据融合、声通信传输超短数据乱序到达等关键技术问题,水面船采用船载超短基阵定位自主水下机器人,然后借助水面通信机将多组超短定位数据告知自主水下机器人,自主水下机器人对已收到超短定位数据进行应答确认,考虑到水面船声链路下传超短数据的丢包风险,水面船采用多个超短定位合并组包和超时重发机制,同时,自主水下机器人也采用乱序组合导航滤波方法,克服了传统超短在线组合导航面临的超短数据丢包、乱序超短数据无法处理的难题,将超短数据融合从当前时刻扩展到历史时刻,有效提高了超短数据的利用率,提升了自主水下机器人基于超短基线的组合导航精度,实现自主水下机器人在水下回收过程的高精度水下组合导航定位。
本发明为实现上述目的所采用的技术方案是:
一种适用水下回收过程的超短组合导航方法,包括以下步骤:
1)根据自主水下机器人当前时刻t
2)利用自主水下机器人当前时刻t
3)基于当前时刻t
4)基于历史时刻
5)返回步骤3),直至遍历所有历史时刻,以利用基于自主水下机器人在初始时刻的位置和精度,对自主水下机器人在当前时刻t
所述步骤1)具体如下:
其中,
所述步骤2)包括以下步骤:
计算t
根据t
所述计算t
其中,R(k)表示t
所述根据t
其中,K
所述步骤3)包括以下步骤:
根据t
根据
所述根据t
其中,
其中,
所述根据
其中,R(k
所述步骤4)具体为:
使用时刻t
其中,P
所述遍历所有历史时刻的过程为:每次使用历史时刻
本发明具有以下有益效果及优点:
1.相对于传统超短组合导航方法,本方法考虑水面船通过水声下发超短定位的丢包问题、超短定位超时重发引发的超短数据乱序到达等问题,实现了水下对接过程中自主水下机器人高精度超短组合导航功能,提高了自主水下机器人的位置精度。
2.应用范围广。本发明不但可以应用于AUV平台水下对接工况,还可以用于AUV长时间巡航探测、AUV高精度区域探测等工况。
3.为了有效融合自主水机器人的超短定位,节约声信道带宽,提高超短定位的利用率,本发明采用乱序超短数据融合策略,以超短合定位合并组包下传策略、乱序超短融合算法替代传统超短实时下传、顺时超短融合算法,改进了自主水下机器人对超短定位的利用率,提高了自主水下机器人的导航精度。
附图说明
图1a是本发明的超短组合导航结构图;
图1b是本发明的自主水下机器人结构图;
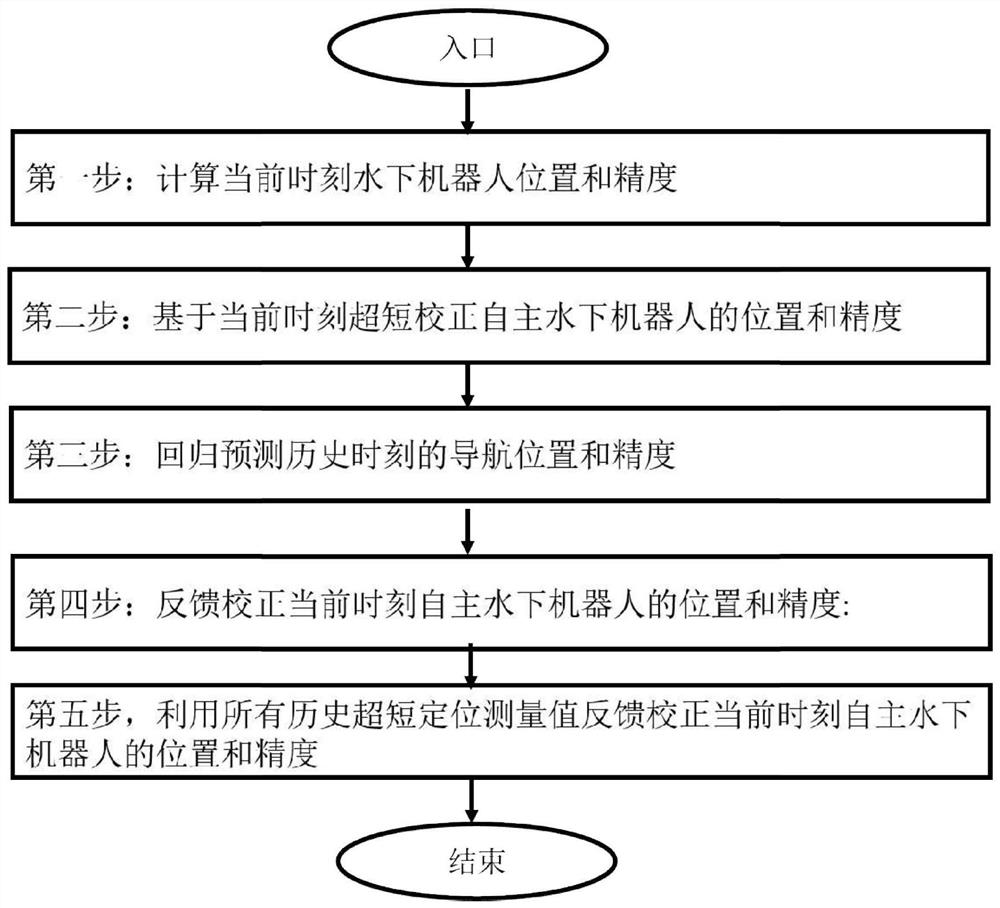
图2是本发明的流程图。
具体实施方式
下面结合附图及实施例对本发明做进一步的详细说明。
整个系统组成包括水面船、水面船搭载的超短基阵、GPS、光纤罗经、水声通信机,自主水下机器人、自主水下机器人搭载的多普勒计程仪、深水罗经、水声通信机、声学定位信标等设备。其中自主水下机器人是搭载多普勒计程仪、光纤罗经、水声通信机、声学定位信标的运载具,多普勒计程仪、光纤罗经是自主水下机器人的内部导航传感器,其中多普勒计程仪的作用是测量自主水下机器人相对于海底的航行速度;深水罗经的作用是测量自主水下机器人的航向角、纵倾角、横滚角等姿态角;自主水下机器人的水声通信机的作用是接收水面船下发的超短定位信息,向水面船应答反馈已经收到的超短定位,同时告知自主水下机器人的水下工作状态。水面船是搭载超短基阵、GPS、光纤罗经、水声通信机的运载具,其中GPS是水面船的定位传感器,它的作用是提供水面船超短基阵的大地系绝对位置;光纤罗经是水面船的姿态传感器,它的作用是测量水面船的姿态角,光纤罗经测量的测量角输入到超短基阵中,超短基阵借助姿态转换矩阵将光纤罗经测量角换算为基阵姿态角(水面船和超短基阵的连接方式是刚性连接,所以姿态转换矩阵是常量矩阵);超短基阵是水面船定位自主水下机器人位置的传感器,它的作用是直接测量自主水下机器人相对水面船的距离和方位,根据GPS定位、光纤罗经姿态角间接计算自主水下机器人大地系的绝对位置,系统组成如图1a~图1b所示。
如图2所示,整个系统按照如下流程工作:
为了描述方便,首先对一些变量进行定义。定义X
定义α
定义
为了方便描述矩阵和向量的运算,定义T表示矩阵或向量的转置算子,||·||表示向量的2范数算子,定义
第一步,预测当前时刻自主水下机器人的位置和精度
根据自主水下机器人当前时刻t
其中
第二步,基于当前时刻超短量测校正自主水下机器人的位置和精度
在估计当前时刻t
(1)计算t
根据t
其中φ
(2)在t
数据融合当前时刻t
其中
第三步,回归预测历史时刻的导航位置和精度
根据t
(1)回归预测
根据t
其中
(2)回归预测
根据自主水下机器人在当前时刻t
其中
(3)计算
根据
其中R(k
第四步,反馈校正当前时刻自主水下机器人的位置和精度
使用时刻t
其中
第五步,利用所有历史超短定位测量值反馈校正当前时刻自主水下机器人的位置和精度
利用所有历史时刻
表1融合所有历史数据反馈校正自主水下机器人的位置和精度
- 一种适用水下回收过程的超短组合导航方法
- 一种基于超短基线和航位推算的水下导航定位方法