无人机平台和无人机组
文献发布时间:2023-06-19 11:13:06
技术领域
本发明涉及无人机平台领域,具体而言,涉及一种无人机平台和无人机组。
背景技术
现有的无人机,多为单机执行任务,执行效率低,并且在执行飞行任务过程中,无能源补给,续航时间短。尤其是在野外救援或火场救援等紧急任务执行中,执行效率还有待进一步提高。
发明内容
本发明的目的包括提供了一种无人机平台和无人机组,其能够搭载多个无人机,多机协作完成复杂任务,执行效率高,并且能及时补充无人机电量,延长无人机续航里程。
本发明的实施例可以这样实现:
第一方面,本发明提供一种无人机平台,包括平台本体、旋翼组件、充电组件、电气能源动力组件、通信组件和控制组件,所述平台本体包括上表层、中间层和下表层,所述通信组件设置在所述上表层,所述充电组件设置在所述下表层,所述电气能源动力组件和所述控制组件设置在所述中间层;所述旋翼组件设置在所述平台本体上并沿远离所述平台本体的方向延伸设置。
在可选的实施方式中,所述旋翼组件包括延伸杆、旋翼和驱动件,所述延伸杆与所述平台本体连接,所述驱动件设置在所述延伸杆远离所述平台本体的一端,所述旋翼与所述驱动件传动连接。
在可选的实施方式中,所述平台本体呈六边形,所述延伸杆的数量包括六个,每个延伸杆设于一个所述六边形的顶角处。
在可选的实施方式中,所述平台本体上设有支脚,所述延伸杆与所述支脚铰接,且铰接点设于所述六边形的每个顶角处。
在可选的实施方式中,所述延伸杆远离所述平台本体的一端设有固定架,所述固定架与所述延伸杆转动连接,所述延伸杆在绕所述铰接点转动并靠近所述支脚的状态下,所述固定架能与所述支脚连接。
在可选的实施方式中,所述充电组件包括多个充电吸盘,多个所述充电吸盘间隔设置在所述下表层,并分别与所述电气能源动力组件和控制组件电连接,用于为无人机充电。
在可选的实施方式中,所述电气能源动力组件包括混动系统,所述混动系统包括燃油发动机和锂电池,所述燃油发动机和所述锂电池中的至少一个与所述旋翼组件连接,用于为所述旋翼组件提供动力;所述燃油发动机和所述锂电池中的至少一个与所述充电组件连接。
在可选的实施方式中,所述混动系统还包括交流发电机、电能转换单元和监控模块,所述燃油发动机与所述交流发电机连接,所述交流发电机与所述电能转换单元连接,所述电能转换单元与所述旋翼组件和所述充电组件中的至少一者连接,所述监控模块分别与所述燃油发动机、所述锂电池、所述交流发电机和所述电能转换单元连接。
在可选的实施方式中,所述控制组件包括飞控单元、遥控单元、数字图传单元、云台和航拍相机,所述云台安装在所述平台本体上,所述航拍相机设置在所述云台上,所述航拍相机与所述数字图传单元连接,所述数字图传单元和所述遥控单元分别与所述飞控单元连接,所述飞控单元用于控制所述平台本体的飞行状态。
第二方面,本发明提供一种无人机组,包括多个无人机和如前述实施方式中任一项所述的无人机平台,多个所述无人机搭载在所述无人机平台上,在执行任务的状态下,多个所述无人机飞离所述无人机平台,并与所述无人机平台建立通信网络。
本发明实施例的有益效果包括,例如:
本发明实施例提供的无人机平台,包括平台本体和旋翼组件、充电组件、电气能源动力组件、通信组件和控制组件,平台本体用于搭载无人机,充电组件用于为无人机充电,以延长无人机的续航里程,通信组件用于与无人机建立网络通信,协作多机完成复杂任务,提高多机执行任务的完成效率。
本发明实施例提供的无人机组,包括多个无人机和上述的无人机平台,多个无人机搭载在无人机平台上,在执行任务的状态下,多个无人机飞离无人机平台,并与无人机平台建立通信网络,通过多个无人机之间的协同作业,以提高任务执行效率。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
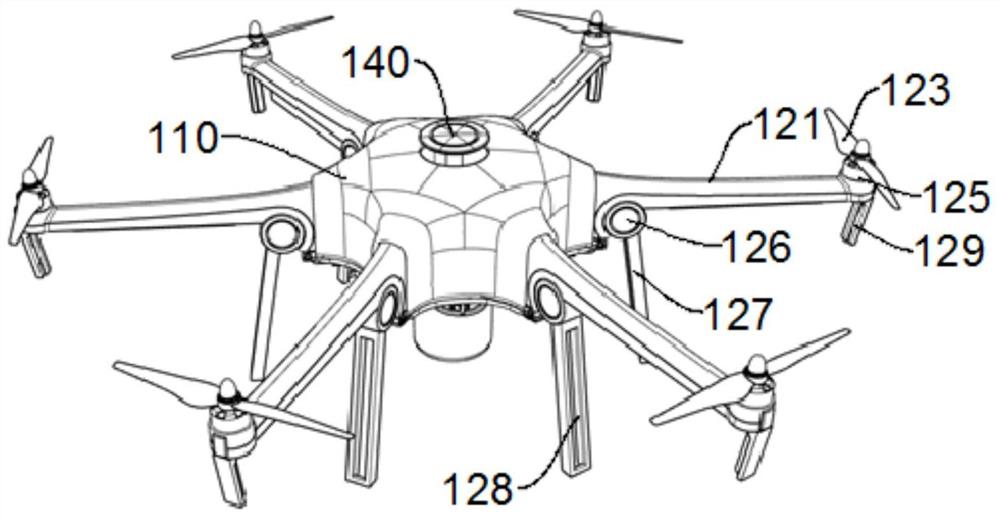
图1为本发明实施例提供的无人机平台的第一视角的结构示意图;
图2为本发明实施例提供的无人机平台的第二视角的结构示意图;
图3为本发明实施例提供的无人机平台的平台本体内部的结构示意图;
图4为本发明实施例提供的无人机平台展开状态下的结构示意图;
图5为本发明实施例提供的无人机平台折叠状态下的结构示意图;
图6为本发明实施例提供的无人机平台的混动系统的组成框图示意图图。
图标:100-无人机平台;110-平台本体;101-上表层;103-中间层;105-下表层;120-旋翼组件;121-延伸杆;123-旋翼;125-驱动件;126-转轴;127-支脚;128-卡槽;129-固定架;130-充电组件;140-通信组件;150-电气能源动力组件;10-燃油发动机;20-交流发电机;30-电能转换单元;40-锂电池;50-监控模块;160-控制组件。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
在本发明的描述中,需要说明的是,若出现术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,若出现术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
需要说明的是,在不冲突的情况下,本发明的实施例中的特征可以相互结合。
请参考图1至图3,本实施例提供了一种无人机平台100,包括平台本体110、旋翼组件120、充电组件130、电气能源动力组件150、通信组件140和控制组件160,平台本体110包括上表层101、中间层103和下表层105,通信组件140设置在上表层101,充电组件130设置在下表层105,电气能源动力组件150和控制组件160设置在中间层103;旋翼组件120设置在平台本体110上并沿远离平台本体110的方向延伸设置。平台本体110用于搭载无人机,充电组件130用于为无人机充电,以延长无人机的续航里程,通信组件140用于与无人机建立网络通信,协作多机完成复杂任务,提高多机执行任务的完成效率。
可选地,旋翼组件120包括延伸杆121、旋翼123和驱动件125,延伸杆121与平台本体110连接,驱动件125设置在延伸杆121远离平台本体110的一端,旋翼123与驱动件125传动连接。本实施例中,驱动件125包括但不限于采用无刷电机,旋翼123与无刷电机的输出轴传动连接,无刷电机转动带动旋翼123转动,实现无人机平台100的飞行。平台本体110大致呈六边形,延伸杆121的数量包括六个,每个延伸杆121设于一个六边形的顶角处。需要说明的是,本实施例中,平台本体110的轮廓边缘并不是标准的六边形,为了减小结构应力,轮廓的六条边也不是直边,而是呈圆弧形,圆弧边朝平台本体110的中心内凹,以缩减尺寸,减轻整个平台本体110的重量。
可选地,请参考图4和图5,平台本体110上设有支脚127,延伸杆121与支脚127铰接,且铰接点设于六边形的每个顶角处。支脚127用于平台本体110着陆后的支点,即支脚127也设置在圆弧六边形的各个顶角处,延伸杆121与支脚127转动连接,可实现旋翼组件120的收缩折叠。可以理解,平台本体110的六边形的各个顶角处设有转轴126,即铰接点为转轴126,支脚127连接在转轴126上,延伸杆121套设在转轴126上,延伸杆121能绕转轴126转动,以与支脚127重合,即处于收缩折叠状态。
进一步地,延伸杆121远离平台本体110的一端设有固定架129,固定架129与延伸杆121转动连接,延伸杆121在绕铰接点即转轴126转动并靠近支脚127的状态下,固定架129能与支脚127连接。可选地,支脚127上开设有卡槽128,固定架129能卡入支脚127的卡槽128中,实现固定架129与支脚127的卡接,固定架129的作用在于无人机平台100在非工作模式下,即处于收缩折叠的状态下,固定架129能起到固定支脚127的作用。
在其它可选的实施方式中,平台本体110也可以是五边形、八边形等其它任意形状,延伸杆121的数量、支脚127的数量也并不限于六个,也可以适当灵活设置,比如,三个、四个、五个或八个等,这里不作具体限定。
请结合图2,充电组件130包括多个充电吸盘,多个充电吸盘间隔设置在下表层105,并分别与电气能源动力组件150和控制组件160电连接,用于为无人机充电。本实施例中,充电吸盘的数量为六个,可以用于为六个无人机同时充电。六个充电吸盘间隔设置在平台本体110的底部,每个充电吸盘设有圆形凹槽,圆形凹槽内设有磁铁或其它磁吸元件,用于将无人机通过磁力吸附的方式固定在充电吸盘上,以为无人机进行充电。圆形凹槽的设置能使无人机与充电吸盘的结合力更强,结构更加稳固,进一步通过磁力吸附,防止无人机在充电过程中分离,同时磁力吸附具有一定的纠偏性能,当无人机靠近充电吸盘时,充电吸盘能自动通过磁力将无人机吸附至圆形凹槽内,实现自动定位充电的目的。可选地,无人机与平台本体110采用无线充电模式,即每个充电吸盘均安装放置有Wi-Po无线高频磁共振充电模块,该充电模块为现有产品,这里不作过多阐述。
请参考图6,电气能源动力组件150包括混动系统,混动系统包括燃油发动机10、交流发电机20、电能转换单元30、锂电池40和监控模块50,燃油发动机10和锂电池40作为油电混合动力提供装置,燃油发动机10和锂电池40中的至少一个与旋翼组件120连接,用于为旋翼组件120提供动力,燃油发动机10和锂电池40中的至少一个与充电组件130连接,用于为充电组件130供电。可选地,燃油发动机10与交流发电机20连接,交流发电机20与电能转换单元30连接,电能转换单元30与旋翼组件120和充电组件130中的至少一者连接;监控模块50分别与燃油发动机10、锂电池40、交流发电机20和电能转换单元30连接,用于监测燃油发动机10、锂电池40、交流发电机20和电能转换单元30的工作状态,并在监测到产生故障状态时进行故障报警,以提高无人机的稳定性和续航时间。
可以理解,当锂电池40作为动力提供设备时,锂电池40为驱动件125供电,驱动件125带动旋翼123转动,实现无人机平台100的飞行。同时,锂电池40还能与充电组件130电连接,用于为无人机充电提供电能。当燃油发动机10作为动力提供设备时,燃油发动机10为驱动件125供电。可选地,燃油发动机10包括四冲程活塞油机,四冲程活塞油机与旋翼123连接,利用四冲程活塞油机驱动旋翼123转动,实现无人机平台100的飞行。此外,四冲程活塞油机与交流发电机20传动连接,四冲程活塞油机通过高速同步带减速器驱动交流发电机20转动,从而产生电能。交流发电机20与电能转换单元30连接,交流发电机20输出电能通过电能转换单元30进行稳压后转化为恒压电能,能够为平台本体110上的机载设备比如锂电池40充电,以及用于驱动无刷电机转动带动旋翼123转动。
可选地,无人机平台100在起飞和上升阶段可使用燃油发动机10作为动力装置,为无人机起飞阶段提供足够的马力。当无人机飞到指定位置时,也可以采用燃油发动机10工作,一方面为无人机平台100提供飞行动能,另一方面对无人机平台100上携带的锂电池40进行蓄电。当无人机平台100处于悬停状态时,可采用锂电池40直接供电,为旋翼组件120提供动力,以此达到节约能量,延长续航时间的目的。
此外,电气能源动力组件150还包括动力分配切换单元、能源存储单元以及散热单元,动力分配切换单元分别与燃油发动机10和锂电池40连接,动力分配切换单元用于判断无人机平台100的飞行状态,并根据飞行状态来确定采用燃油发动机10或锂电池40作为动力提供设备。可选地,动力分配切换单元还用于在交流发电机20工作的状态下,根据实际情况执行电流滤波、电压稳幅控制、过电保护、无刷电机工作状态控制等。能源存储单元包括柴油油箱,用于存储柴油,以带动燃油发动机10工作。散热单元主要用于平台本体110上各种设备的散热,防止温升过高,散热单元包括但不限于风冷、冷却循环水路等,这里不作具体限定。
通信组件140可采用5G小基站,设置在平台本体110的上表层101,5G小基站可包括但不限于选用类浪潮云熠IRAN系列,在一定范围内覆盖5G信号,以便于与无人机建立通信网络,实现数据交互与协同作业。
控制组件160包括飞控单元、遥控单元、数字图传单元、云台和航拍相机,云台安装在平台本体110上,航拍相机设置在云台上,航拍相机与数字图传单元连接,数字图传单元和遥控单元分别与飞控单元连接,飞控单元用于控制平台本体110的飞行状态。飞控单元包括显示装置、传感器、飞控计算机、作动器、自测试装置、信息传输链及接口装置等,其中,充电器包括但不限于GPS北斗导航芯片、气压传感器、惯性测量单元(IMU)、指南针、磁强计、倾角计、空速计、光流里程计、小型测距雷达、电压传感器等。飞控单元作为无人机平台100的核心控制部件,可采用现有模块产品,这里不作具体介绍。云台用于调整航拍相机的拍摄视角,可360度全方位拍摄,航拍相机的拍摄数据(包括图片、文字、声音等)传递至数字图传单元,数字图传单元反馈至飞控单元;遥控单元可用于接收地面的远程控制指令,包括但不限于对云台转动角度的控制以及无人机平台100飞行姿态、路径的控制。
可选地,本实施例中,无人机平台100可采用但不限于碳纤维或铝型材等,即具有足够的强度和刚度,质量也较轻,结构简单,加工方便,便于组装和拆解。
本发明实施例还提供一种无人机组,包括多个无人机和如前述实施方式中任一项的无人机平台100,多个无人机搭载在无人机平台100上,在执行任务的状态下,多个无人机飞离无人机平台100,并与无人机平台100建立通信网络,协同作业,高效完成复杂任务。
根据本实施例提供的一种无人机平台100和无人机组,其工作原理如下:
该无人机平台100可以应用在野外救援、洪涝、地震、山体滑坡和森林大火等自然灾害中,采用无人机平台100搭载多个无人机,多无人机协作高效地完成复杂的任务,以保障人民群众的生命和财产安全。该无人机平台100上设有5G小基站,可在一定范围内覆盖5G信号;无人机搭载在平台本体110上,当到达指定位置如救援现场后,多个无人机飞离平台本体110,以无人机平台100为中心,向周围分散开,分散后的无人机处于无人机平台100的5G信号覆盖范围内,能与无人机平台100建立网络通信,实现信号的交互和传递,多机救援执行效率更高,能完成更复杂的救援任务。无人机平台100上设有充电组件130,可以为无人机进行充电,延长无人机的续航里程,可长时间在野外执行任务。无人机平台100采用油电混合动力模式,可灵活切换动力提供设备,能耗低,有利于延长作业时间。当然,该无人机平台100不仅可以用于野外救援领域,也可以用于巡检领域、航拍领域或其它领域,这里不作具体限定。
综上所述,本发明实施例提供的一种无人机平台100和无人机组,具有以下几个方面的有益效果:
该无人机平台100和无人机组应用范围广,能用于野外救援、巡检或航拍等领域,多机协作,任务执行效率高,飞行布局灵活,信号交互方便,续航能力强,动力充足,能耗低,可长时间处于工作状态中。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 无人机平台和无人机组
- 空中充电无人机组及其充电用无人机以及功能型无人机