具有收发器运动补偿的信号积分
文献发布时间:2023-06-19 11:14:36
发明内容
本公开涉及一种用于处理由收发器检测到的信号的方法,其中该信号包括对应于相应时隙的帧。帧包括根据信号的量化分辨率而配置的bin。
许多车辆雷达系统包括雷达收发器,其被布置用于生成利用组成雷达系统的相应天线发射、反射和接收的雷达信号。雷达信号可例如为FMCW(调频连续波)信号的形式。
如果目标提供弱检测并且如果应进一步分析目标例如如果应确定目标的类型,有时期望增强积分增益或信噪比,同时保持雷达收发器的分辨率,以便能够例如在嘈杂的环境中区分目标。
这可通过校正雷达收发器的运动来完成,并且本公开的目的是以计算复杂度降低的有效方式提供此类校正。
该目的通过用于处理由收发器检测到的收发器信号的方法来实现,该方法包括从收发器信号获得处理信号,该处理信号包括对应于相应时隙的帧。帧包括根据收发器信号的量化分辨率配置的bin。该方法还包括获得与收发器在时隙期间相对于收发器视野中对象的相对运动相关的数据,以及将残余距离初始化为零。
对于每个帧和每个相应时隙,该方法还包括确定对应于残余距离和对应于收发器在相应时隙中相对于所述对象的相对运动的距离值之和的移位距离,将相对于距离分辨率的确定的移位距离舍入成舍入的移位距离。此外,该方法然后包括基于确定的移位距离与舍入的移位距离之间的差值来更新残余距离,并且通过将帧的bin移位舍入的移位距离来生成经调节的帧,以解释在相应时隙中相对于所述对象的相对收发器运动。该方法然后包括通过在经调节的帧上对bin值积分来处理信号。
这使得能够以比先前已知的更有效方式校正雷达收发器运动,同时降低计算复杂性。
如果目标提供弱检测并且如果应进一步分析目标例如如果应确定目标的类型,这继而使得能够增强积分增益或信噪比,同时保持雷达收发器的分辨率,以便能够例如在嘈杂的环境中区分目标。
根据一些方面,信号是由雷达收发器检测到的雷达信号,其中bin根据雷达信号的距离分辨率来配置。距离分辨率与每个bin的频率跨度成比例。
根据一些方面,雷达信号是调频连续波(FMCW)雷达信号。
根据一些方面,帧对应于傅里叶变换或快速傅里叶变换(FFT)矢量。
因此,该方法可应用于雷达系统。
根据一些方面,与收发器的相对运动相关的数据从接收信号的多普勒频移获得。
根据一些方面,与收发器在时隙期间运动相关的数据包括与收发器在绝对坐标系中运动相关的数据。
根据一些方面,舍入包括舍入以下:
上至距离分辨率的最近上整数倍,
下至距离分辨率的最近下整数倍,或者
至距离分辨率的最近整数倍。
这样,可使用任何合适类型的舍入。
根据一些方面,获得与车辆中收发器的运动相关的数据包括获得与车辆在一时隙中的加速相关的数据。
这样,也可考虑可能的加速。
根据一些方面,获得与收发器的运动相关的数据包括对数据滤波以抑制数据中的噪声。
根据一些方面,滤波包括卡尔曼滤波、粒子滤波或Wiener滤波中的任一种滤波。
因此,滤波可以许多已知的方式执行。
根据一些方面,获得与车辆中收发器的运动相关的数据包括获得与车辆的航向相关的数据。
这样,可考虑车辆的航向。
本公开还涉及与根据上文的优点相关联的对应控制单元。
附图说明
现在参考附图更详细地描述本公开,附图中:
图1示出了具有雷达收发器的车辆的示意性俯视图;
图2示意性地示出了雷达信号帧;
图3A至图3B示出了时隙上的雷达信号帧;
图4是示出方法的流程图;
图5示意性地示出了控制单元;
图6示出了示例性计算机程序产品;并且
图7示意性地示出了控制单元;
具体实施方式
现在将参考附图在下文中更全面地描述本公开的各方面。然而,本文所公开的不同的设备、系统、计算机程序和方法可以许多种不同的形式实现,并且不应被理解为限于本文阐述的方面。在全文中,同样的附图标记在附图中是指同样的元件。
本文所用的术语仅用于描述本公开的方面,并非旨在限制本发明。如本文所用,单数形式“一个”和“所述”旨在也包括复数形式,除非上下文另外清楚地指明。
图1示出了包括雷达系统140的车辆100,该雷达系统继而包括雷达收发器110和控制单元120。雷达收发器110根据一些方面由FMCW(调频连续波)收发器构成,该FMCW收发器适用于以先前已知的方式发射调频信号并且接收对应的反射信号。在该示例中,在时隙期间已被收发器110视野内的对象150反射的信号构成已由收发器110检测到的收发器信号115,其中收发器110相对于对象150具有相对运动。收发器信号115与发射信号混合,使得获得构成IF(中频)信号的差值信号并且对该差值信号进行滤波。
凭借例如FFT(快速傅里叶变换),IF信号转换成处理信号,如图2所示,该处理信号包括帧200,其中每个帧200对应于相应时隙dt,并且根据一些方面由FFT矢量构成。每个帧200包括根据处理信号的距离分辨率dr配置的bin 210,其中距离分辨率dr以已知的方式与每个bin的对应频率跨度df成比例。在每个bin 210中,存在具有复值(即,幅度和相位角)的信号检测220。
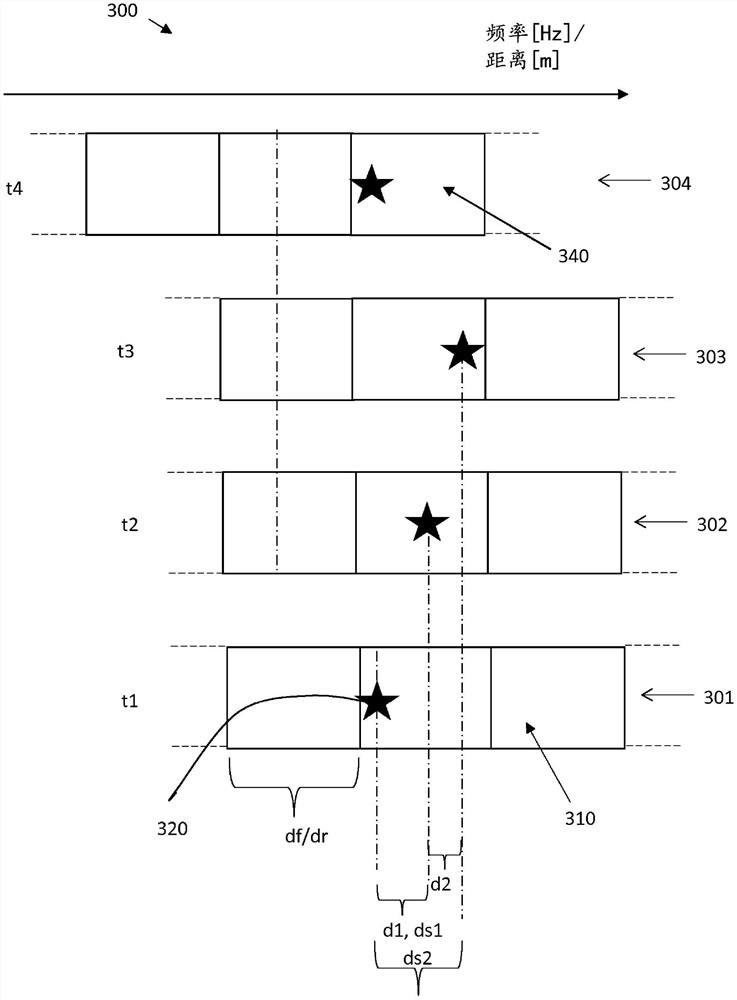
如图3A所示,存在多个帧300,每个帧301、302、303、304对应于相应雷达扫描和相应时隙t1、t2、t3、t4,并且包括多个bin 310。在第一时隙t1、第二时隙t2和第三时隙t3内,对应于对象150的信号检测320在某个bin 311中示出。信号检测320在时隙t1、t2、t3之间的恒定相位角对应于收发器110相对于对象150不存在相对运动,而信号检测320在时隙t1、t2、t3之间的变化相位对应于收发器110相对于对象150的一定相对运动。对不同时隙的bin值的进一步FFT揭示了相对运动,使得距离-多普勒矩阵可以先前已知的方式获得。
在该示例中,在三个时隙t1、t2、t3期间存在收发器110相对于对象150的相对运动,这在概念上被示为对应的信号检测320在其bin 311内移动,如对三个对应的连续帧301、302、303所示,并且还被示为具有穿过信号检测320的线330。最后,信号检测320将其bin留给相邻bin。
为了补偿误差源(诸如背景噪声),有时期望将帧301、302、303与其信号检测320在时间上积分,使得信号检测320更易于区分。如果存在收发器110相对于对象150的相对运动,并且对应信号检测320将其bin留给相邻bin,则这将负面影响积分,信号检测320在积分期间混淆若干bin。
因此,期望积分并且同时补偿相对运动。根据本公开,如图3A中的第四时间t4所示,当信号检测320将其bin留给对应帧304中的相邻bin340时,bin被移位以使得信号检测320出现在其原始bin处。
现在将参考图3B更详细地描述如何实现这一点,图3B示出了图3A在信号检测320周围的放大部分。残余距离在第一时隙t1处初始设为零。在随后的第二时隙t2处,在第一循环,确定对应于残余距离和第一距离值d1之和的第一移位距离ds1,该残余距离此处初始为零,该第一距离值对应于收发器110在第二时隙t2中相对于所述对象150的相对运动。则第一移位距离ds1此处等于第一距离值d1。
接下来,将第一移位距离ds1相对于距离分辨率dr舍入至第一舍入的移位距离。根据一些方面,舍入包括舍入至距离分辨率dr的最近整数倍。此处,第一移位距离ds1降至距离分辨率dr的一半以下,该舍入为零并且舍入的移位距离为零。
然后,残余距离基于确定的第一移位距离ds1与为零的舍入的移位距离之间的差值来更新,即,残余距离等于第一移位距离ds1。之后,经调节的帧通过将帧的bin 310移位舍入的移位距离来生成,以解释在相应时隙中相对于所述对象的相对收发器运动,在这种情况下不存在移位,因为舍入的移位距离为零。
在随后的循环,在随后的第三时隙t3处,确定对应于残余距离和第二距离值d2之和的第二移位距离ds2,该残余距离此处等于第一移位距离ds1,该第二距离值对应于收发器110在第三时隙t3中相对于所述对象150的相对运动。因此,第二移位距离ds2等于第一距离值d1和第二距离值d2之和。
接下来,将第二移位距离ds2相对于距离分辨率dr舍入至第二舍入的移位距离。此处,第二移位距离ds2超过距离分辨率dr的一半,但是仍降至距离分辨率dr以下,该舍入等于距离分辨率dr。
然后,残余距离基于确定的第二移位距离ds2与作为距离分辨率dr的舍入的移位距离之间的差值来更新。之后,经调节的帧通过将帧的bin 310移位在第四时隙t4内所示的舍入的移位距离dr来生成。此处,信号检测320刚移动到相邻bin 340。
对于要进行积分的所有帧,重复以上过程。当根据上文已处理所有帧时,通过在经调节的帧300上对bin值310、340积分来进一步处理信号。
在存在超过一个关注对象150、160的情况下,则至少当不同的对象具有不同的相对速度,该过程可针对每个对象单独重复。
注意,通过应用FFT,如用于生成多普勒值,隐式执行积分。然而,应当理解,根据该技术的不同具体实施方面,积分可以多种不同的方式执行。例如,可对帧值的幅度求和。该积分则与不同bin中的相位值无关。
也可执行相干积分,即,在时间上对bin中的复值求和。此类相干积分可包括调节相位以解释相对速度。
根据一些方面,经调节的帧通过将帧的bin 310移位舍入的移位距离dr来生成。
在上文中,已针对雷达系统140描述了本公开,该雷达系统继而包括雷达收发器110和控制单元120。一般地,本公开可应用于任何种类的合适的环境检测系统,该环境检测系统包括适于检测信号的收发器和控制单元。检测到的信号包括对应于相应时隙t1、t2、t3、t4的帧,其中帧包括根据信号的量化分辨率配置的bin。所用的信号和收发器的类型取决于环境检测系统的类型,其中根据一些方面,相机系统适于检测图像信号,并且Lidar系统适于检测光信号。
一般地,本公开对应于图4中流程图所示的方法。该方法涉及处理由收发器110检测到的收发器信号115。该方法包括从收发器信号115获得S1处理信号,该处理信号包括对应于相应时隙t1、t2、t3、t4的帧200、300,其中帧包括根据收发器信号115的量化分辨率dr配置的bin 210、310。该方法还包括获得S2与收发器110在时隙t1、t2、t3、t4期间相对于收发器110视野中对象150的相对运动相关的数据,并且将残余距离初始化S3为零。
对于每个帧200、300和每个相应时隙t1、t2、t3、t4,该方法还包括确定S4对应于残余距离和对应于收发器110在相应时隙t1、t2、t3、t4中相对于所述对象150的相对运动的距离值d1、d2之和的移位距离ds1、ds3,将确定的移位距离ds1、ds3相对于距离分辨率dr舍入S5至舍入的移位距离。此外,该方法然后包括基于确定的移位距离ds1、ds3与舍入的移位距离之间的差值来更新S6残余距离,以及通过将帧的bin 310移位舍入的移位距离来生成S7经调节的帧304,以解释在相应时隙中相对于所述对象150的相对收发器运动。该方法然后包括通过在经调节的帧300上对bin值210、310积分来处理S8信号。
根据一些方面,如上所讨论,信号是由雷达收发器110检测到的雷达信号,其中bin210、310根据雷达信号115的距离分辨率dr来配置。距离分辨率dr与每个bin 210、310的频率跨度df成比例。
根据一些方面,雷达信号是调频连续波(FMCW)雷达信号。
根据一些方面,帧对应于傅里叶变换或快速傅里叶变换(FFT)矢量。
根据一些方面,与收发器110的相对运动相关的数据从接收信号的多普勒频移获得。
根据一些方面,与收发器110在时隙t1-t4期间的运动相关的数据包括与收发器110在绝对坐标系中的运动相关的数据。
根据一些方面,舍入包括以下:
-上舍入至距离分辨率dr的最近上整数倍;
-下舍入至距离分辨率dr的最近下整数倍;或
-舍入至距离分辨率dr的最近整数倍。
根据一些方面,获得与车辆100中收发器110的运动相关的数据包括获得与车辆100在一时隙中的加速相关的数据。
根据一些方面,获得与收发器110的运动相关的数据包括对数据滤波以抑制数据中的噪声。根据一些方面,滤波包括卡尔曼滤波、粒子滤波或Wiener滤波中的任一种滤波。
根据一些方面,获得与车辆100中收发器110的运动相关的数据包括获得与车辆100的航向相关的数据。
图5示意性地示出了根据本公开的方面的控制单元120。应当理解,上述方法和技术可在硬件中实现。然后,该硬件被布置成执行该方法,由此获得与以上已讨论的相同的优点和效果。
使用能够执行存储在计算机程序产品(例如,以存储介质530的形式)中的软件指令的合适的中央处理单元(CPU)、多处理器、微控制器、数字信号处理器(DSP)等中的一种或多种的任何组合提供处理电路510。还可提供处理电路510作为至少一个专用集成电路(ASIC)或现场可编程门阵列(FPGA)。
具体地,处理电路510被配置为引起分类单元执行一组操作或步骤。例如,存储介质530可存储该组操作,并且处理电路510可被配置为从存储介质530检索该组操作以引起分类单元执行该组操作。可提供该组操作作为一组可执行指令。因此,处理电路510由此被布置成执行如本文所公开的方法。
存储介质530还可包括永久存储装置,该永久存储装置例如可以是磁性存储器、光学存储器、固态存储器或者甚至远程安装的存储器中的任一种或组合。
控制单元120还可包括用于与至少一个外部设备(诸如收发器110)通信的通信接口520。因此,通信接口520可包括一个或多个发射器和接收器,该发射器和接收器包括模拟和数字部件以及用于有线或无线通信的合适数量的端口。
处理电路510例如通过向通信接口520和存储介质530发送数据和控制信号,通过从通信接口520接收数据和报告以及通过从存储介质530检索数据和指令来控制单元的一般操作。省略了单元的其他部件以及相关功能,以免模糊本文所呈现的概念。
图6示意性地示出了计算机程序产品600,该计算机程序产品包括根据上文公开的计算机程序610和在其上存储计算机程序的计算机可读存储介质620。
参考图7,本公开涉及用于车辆100的控制单元120,其中控制单元120被布置成处理由收发器110检测到的收发器信号115。控制单元120包括第一获得模块Sx1,该第一获得模块被配置为从收发器信号115获得处理信号,该处理信号包括对应于相应时隙t1、t2、t3、t4的帧200、300,其中帧包括根据收发器信号115的量化分辨率dr配置的bin 210、310;控制单元120还包括第二获得模块Sx2和初始化模块Sx3,该第二获得模块被配置为获得与收发器110在时隙t1、t2、t3、t4期间相对于收发器110视野中对象150的相对运动相关的数据,该初始化模块被配置为将残余距离初始化为零。
对于每个帧200、300和每个相应时隙t1、t2、t3、t4,控制单元120被布置成,由确定模块Sx4确定对应于残余距离和对应于收发器110在相应时隙t1、t2、t3、t4中相对于所述对象的相对运动的距离值d1、d2之和的移位距离ds1、ds3,以及由舍入模块Sx5将确定的移位距离ds1、ds3相对于距离分辨率dr舍入至舍入的移位距离。
然后,控制单元120被布置成由更新模块Sx6基于确定的移位距离ds1、ds3与舍入的移位距离之间的差值来更新残余距离,以及由生成模块Sx7通过将帧的bin移位舍入的移位距离来生成经调节的帧340,以解释在相应时隙中相对于所述对象150的相对收发器运动。
控制单元120还包括处理模块Sx8,该处理模块被配置为通过在经调节的帧上对bin值积分来处理信号。
根据一些方面,信号是由雷达收发器110检测到的雷达信号,其中bin210、310根据雷达信号115的距离分辨率dr来配置。距离分辨率dr与每个bin 210、310的频率跨度df成比例。
本公开不限于以上示例,还可在所附权利要求书的范围内变化。例如,该方法可应用于任何合适类型的环境传感器,以及任何种类的车辆中。
- 具有收发器运动补偿的信号积分
- 收发器、SUDAC、收发器中的信号处理方法和SUDAC中的信号处理方法