一种基于前沿相位稳定脉冲识别的方法
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及一种雷达脉冲信号截获技术领域,尤其涉及一种基于前沿相位稳定脉冲识别的方法。
背景技术
随着科学技术的发展,越来越多的高性能雷达投入使用,为了保护己方目标,干扰对方的雷达,雷达干扰、雷达组网、雷达关机等防护手段不断完善,尤其是雷达干扰技术,该技术的应用大大降低了传统雷达的侦查能力。雷达接收天线很容易由于自身及环境的影响导致其信道相位不稳定,从而为空间角的计算带来不稳定因素。为提高自身雷达的侦查能力,需要不断地发展完善雷达对不稳定脉冲信号的处理,通过综合采用多种技术手段,提高雷达的侦查能力。
现有技术中,在信号处理环节中较少涉及对前沿相位稳定性的处理,这将导致后续测角结果中好坏参半,测角结束后还需剔除较多的无效空间角数据,致使处理过程耗时增加。为了保护雷达,通常会在雷达附近放置多个干扰源迷惑对方雷达,多个辐射源发出的脉冲信号会形成混叠信号,导致信号脉冲前沿相位较为混乱,直接利用此信号较难测出正确的角度信息,难以达到辐射源准确识别的效果。
由此,本发明提供了一种基于前沿相位稳定脉冲识别的方法,以解决传统方法无法准确、高效识别辐射源的技术问题。
发明内容
为解决上述问题,本发明的目的在于提供一种基于前沿相位稳定脉冲识别的方法,以减少对干扰较多的前沿数据进行不必要的数据处理,并提高后续过程中测角结果的准确性。
为实现上述技术目的,达到上述技术效果,本发明的一方面提供一种基于前沿相位稳定脉冲识别的方法,所述方法无乘、除法运算,包括:
步骤S1,针对包含干扰的脉冲前沿数据,首先找到可靠的起始稳定点;对于接收天线阵列,选择某一个天线接收通道内的数据进行处理;从前沿数据第一个点的相位phaseRef[idx]开始,其中,初始时idx=1,令相位最大值phaseMax=phaseRef[idx],相位最小值phaseMin=phaseRef[idx]。
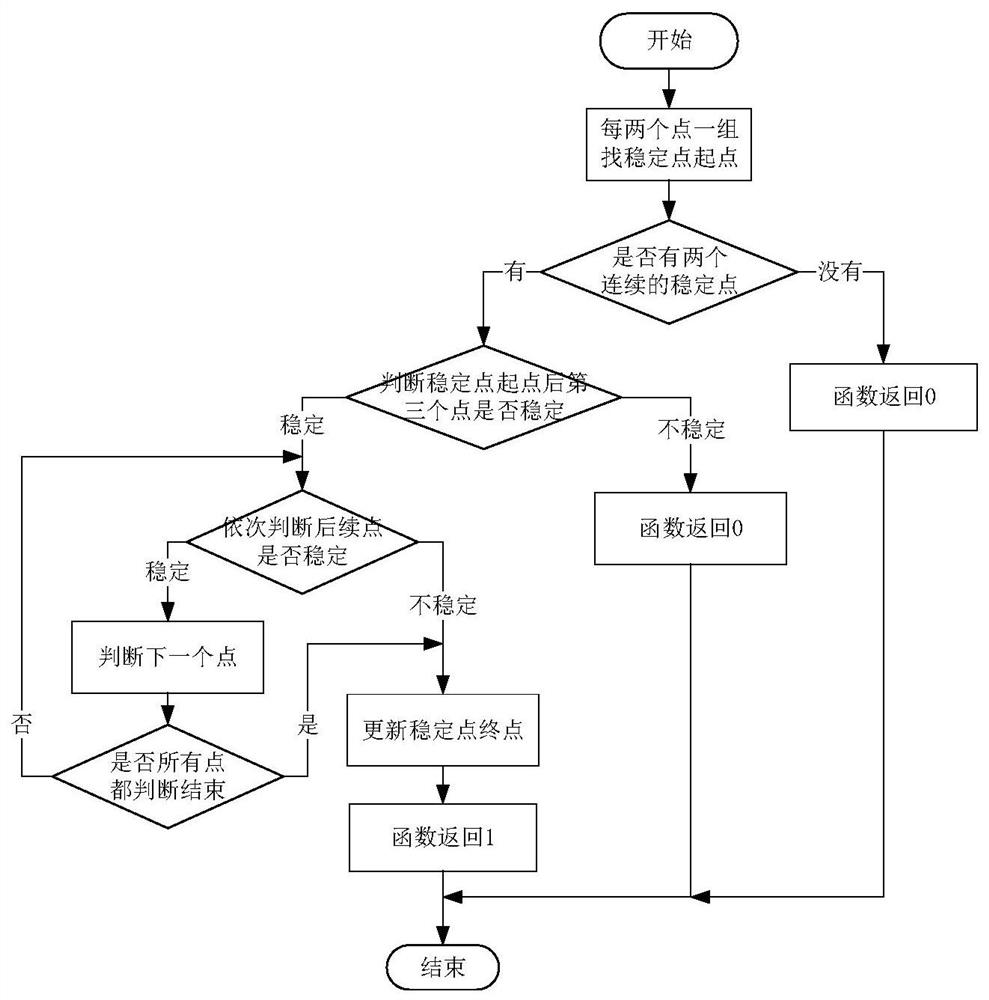
步骤S2,判断第二个点的相位phaseRef[idx+1]>phaseMax是否成立,是则令phaseMax=phaseRef[idx+1],否则判断phaseRef[idx+1] 步骤S3,判断相位最大最小值的差值是否在相位差稳定容差phaseDelta范围内,是则记录第一个点为起始稳定点,继续索引下一个相位数据phaseRef[idx+2]并执行步骤S2~步骤S3;否则剔除第一个点phaseRef[idx],将步骤S1中的idx换成idx+1继续执行步骤S1~S3,以此类推,找到连续N点稳定的前沿相位数据。 本发明的另一方面提供一种基于前沿相位稳定脉冲识别的方法,所述方法需要除法运算,包括: 步骤S1,针对包含干扰的脉冲前沿数据,首先找到可靠的起始稳定点;对于接收天线阵列,选择某一个天线接收通道内的数据进行处理;从前沿数据第一个点的相位phaseRef[idx]开始,其中,初始时idx=1;判断第一个点、第二个点的相位差值|phaseRef[idx]-phaseRef[idx+1]|是否在相位差稳定容差phaseDelta范围内,是则计算相位均值phaseMean=(phaseRef[idx]+phaseRef[idx+1])/2,执行步骤S2;否则剔除phaseRef[idx],将起点设为phaseRef[idx+1],再执行步骤S1。 步骤S2,判断相位均值与下一个点的差值|phaseMean-phaseRef[idx+2]|是否在相位差稳定容差phaseDelta范围内,是则计算相位均值phaseMean=(phaseRef[idx]+phaseRef[idx+1]+phaseRef[idx+2])/3,执行步骤S3;否则剔除phaseRef[idx],将起点设为phaseRef[idx+1],再执行步骤S1。 步骤S3,判断相位均值与下一个点的差值|phaseMean-phaseRef[idx+3]|是否在相位差稳定容差phaseDelta范围内,是则认为这四点是相位稳定点,否则剔除phaseRef[idx+3]及以后的点,停止遍历。 本发明提供了一种基于前沿相位稳定脉冲识别的方法,其有益效果是: (1)本发明针对干扰较多的混叠脉冲信号进行稳定前沿相位识别,筛除前沿相位不稳定的脉冲信号(前沿不稳定也意味着脉冲信号从前沿开始就与干扰信号混叠了),减少了对干扰较多的前沿数据进行不必要的数据处理。 (2)在对脉冲前沿数据进行空间角测量前,本发明通过提取连续稳定的相位数据,提高了在后续过程中测角结果的准确性。 (3)本发明的一方面,只用到基本的加减运算,在保证准确度的前提下提高了运算速度,节省处理时间。 (4)本发明的另一方面,在需要除法运算时,计算了已知稳定相位数据的均值,再与需要判断的相位数据进行比较,提高了处理结果的准确性,使得后续空间角的测量结果更为可靠。 附图说明 为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中, 图1为本发明的一种基于前沿相位稳定脉冲识别的方法的流程示意图。 具体实施方式 为使本发明实施的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行更加详细的描述。所描述的实施例是本发明一部分实施例,而不是全部的实施例。对于本领域技术人员根据本发明内容所作的类似改进与调整在没有作出创造性劳动的前提下所获得的其他实施例,均视为本发明保护的范围。 下面结合附图对本发明的实施例进行详细说明。
如图1所示,一种基于前沿相位稳定脉冲识别的方法,所述方法无乘、除法运算,包括: 步骤S1,针对包含干扰的脉冲前沿数据,首先找到可靠的起始稳定点;对于接收天线阵列,选择某一个天线接收通道内的数据进行处理;从前沿数据第一个点的相位phaseRef[idx]开始,其中,初始时idx=1,令相位最大值phaseMax=phaseRef[idx],相位最小值phaseMin=phaseRef[idx]。 步骤S2,判断第二个点的相位phaseRef[idx+1]>phaseMax是否成立,是则令phaseMax=phaseRef[idx+1],否则判断phaseRef[idx+1] 步骤S3,判断相位最大最小值的差值是否在相位差稳定容差phaseDelta范围内,是则记录第一个点为起始稳定点,继续索引下一个相位数据phaseRef[idx+2]并执行步骤S2~步骤S3;否则剔除第一个点phaseRef[idx],将步骤S1中的idx换成idx+1继续执行步骤S1~S3,以此类推,找到连续N点稳定的前沿相位数据。
如图1所示,一种基于前沿相位稳定脉冲识别的方法,所述方法需要除法运算,包括: 步骤S1,针对包含干扰的脉冲前沿数据,首先找到可靠的起始稳定点;对于接收天线阵列,选择某一个天线接收通道内的数据进行处理;从前沿数据第一个点的相位phaseRef[idx]开始,其中,初始时idx=1;判断第一个点、第二个点的相位差值|phaseRef[idx]-phaseRef[idx+1]|是否在相位差稳定容差phaseDelta范围内,是则计算相位均值phaseMean=(phaseRef[idx]+phaseRef[idx+1])/2,执行步骤S2;否则剔除phaseRef[idx],将起点设为phaseRef[idx+1],再执行步骤S1。 步骤S2,判断相位均值与下一个点的差值|phaseMean-phaseRef[idx+2]|是否在相位差稳定容差phaseDelta范围内,是则计算相位均值phaseMean=(phaseRef[idx]+phaseRef[idx+1]+phaseRef[idx+2])/3,执行步骤S3;否则剔除phaseRef[idx],将起点设为phaseRef[idx+1],再执行步骤S1。 步骤S3,判断相位均值与下一个点的差值|phaseMean-phaseRef[idx+3]|是否在相位差稳定容差phaseDelta范围内,是则认为这四点是相位稳定点,否则剔除phaseRef[idx+3]及以后的点,停止遍历。 综上所述,本发明一方面只用到基本的加减运算,在保证准确度的前提下提高了运算速度,节省处理时间。另一方面计算了已知稳定相位数据的均值,再与需要判断的相位数据进行比较,提高了处理结果的准确性,使得后续空间角的测量结果更为可靠。
- 一种基于前沿相位稳定脉冲识别的方法
- 一种基于前沿相位稳定脉冲识别的方法