一种面向车路协同的智能驾驶行为决策规划方法及系统
文献发布时间:2023-06-19 11:17:41
技术领域
本发明属于车辆智能网联和自动驾驶相关技术领域,特别是涉及一种面向车路协同的智能车辆决策规划方法及系统。
背景技术
在当前的自动驾驶发展路径中,相对于强调“单体智能”的自主式自动驾驶方式来说,侧重于“信息共享”的网联式自动驾驶智能车辆被认为实现无人驾驶的最优途径。但作为网联式信息自动驾驶基础的配套设施建设尚不完善,包括感知,决策,规划,控制等方面的各基本功能实现仍受到一些限制,使得面向车路协同环境的智能车辆存在着决策规划模式单一的问题,影响驾乘体验。
决策规划作为自动驾驶技术的核心组成部分,对行车安全有着至关重要的作用。现有的决策规划系统大多是根据车辆传感器感知到的周围道路交通信息,如车速和道路边界线等,结合自身的车辆运行参数,如车轮转角和方向盘转角等,实时决策出驾驶行为,如换道或跟随等,然后利用规划算法,如搜索,插值等,选取一条最优路径。这种决策方式存在两个方面的问题:第一,针对于决策而言,有且只有一种决策策略,即未对驾乘人所处的行车状态进行考虑,这会使得不同驾乘人在面对单一决策时,驾乘体验会受到严重影响。第二,针对规划而言,只是在静止状态或相对静止状态下进行路径规划,未考虑复杂动态交通场景中,随时可能出现轨迹变化,在路径规划的基础上需要有新的约束保证行车安全。因此,如何在决策规划中嵌入驾驶人的特性与新的行车安全约束,以保证在车路协同环境下的舒适安全行驶,以及如何关联各功能模块形成稳定的闭环系统,保证拟人化的个性驾驶,是目前本领域中一个急需解决的关键技术问题。
发明内容
针对上述分析现有技术的不足,本发明提供了一种面向车路协同的智能驾驶行为决策规划方法,所述方法具体包括以下步骤:
步骤一、在行驶过程中实时感知获取车辆自身包括位置、速度等的行驶信息,以及所在交通场景中道路及道路上物体信息;
步骤二、建立驾驶人决策模型并利用车辆行驶中获取的相关信息对所述模型进行训练,使训练好的驾驶人决策模型能够将驾驶行为划分为保守型、一般型以及激进型三类;
步骤三、以行车安全场作为约束,并结合当前驾乘人员所选定的驾驶行为类型,对车辆进行行驶路径及速度的决策规划;
步骤四、基于所作出的行驶路径及速度的决策规划,对整车进行下层控制,使车辆按照决策规划执行相应行驶动作。
进一步地,步骤二中建立驾驶人决策模型具体基于k-means的聚类算法,其公式为:
其中,
利用驾乘人员的评价对所述驾驶人决策模型进行评价,以对该模型进行持续训练和更新。
进一步地,步骤三中作为约束条件的行车安全场具体包括由道路上运动物体形成的动能场,静止物体形成的势能场和驾驶行为所决定的行为场,其理论模型为:
E
上式中,E
上述各部分具体表示为:
动能场:位于(x
势能场:静止物体i周围形成的势能场可表示为:
行为场:用表征驾驶行为的驾驶人风险因子和对应动能场场强的乘积表示为:
E
上述各式中,(x
进一步地,步骤三中对车辆进行行驶路径及速度的决策规划具体是在经决策判定为变道超车时,采用驾驶行为类型与行车安全场共同约束,规划出最优行驶轨迹,并完成变道超车动作。
相应地,本发明还提供了一种面向车路协同的智能驾驶行为决策规划系统,该系统包括:
车路协同感知模块、驾驶行为决策模块、行车安全场轨迹规划模块以及整车下层控制模块;
其中,所述车路协同感知模块用于在行驶过程中实时感知获取车辆自身包括位置、速度等的行驶信息,以及所在交通场景中道路及道路上物体信息;
所述驾驶行为决策模块用于建立驾驶人决策模型并利用车辆行驶中获取的相关信息对所述模型进行训练,使训练好的驾驶人决策模型能够将驾驶行为划分为保守型、一般型以及激进型三类;
所述行车安全场轨迹规划模块用于以行车安全场作为约束,并结合当前驾乘人员所选定的驾驶行为类型,对车辆进行行驶路径及速度的决策规划;
所述整车下层控制模块用于基于所作出的行驶路径及速度的决策规划,对整车进行下层控制,使车辆按照决策规划执行相应行驶动作。
进一步地,所述系统中的所述驾驶行为决策模块与行车安全场轨迹规划模块作为上层控制模块,为所述整车下层控制模块提供参考路径点、车速与车辆参考状态信息,使整车下层控制模块输出期望转角与期望加速度。
上述本发明所提供的方法和系统,提供了一种面向车路协同的多模块协同架构,使自动驾驶的感知,决策,规划,控制环节更加合理,操作更加拟人化。在系统的感知模块中,利用车载与路侧传感器实现超视距的环境感知,为针对复杂的交通环境做出更合理的决策规划提供了基础前提和指导。在决策模块中,充分考虑不同驾驶人行为特性和面对相同场景采取的不用驾驶行为,以达到合理模拟“真人”驾驶。在规划模块中,将行车风险场作为得到最优轨迹的约束,针对不同交通场景中智能车辆周围不同的道路使用主体,将行车风险最低化,以保证安全驾驶。在控制模块中,匹配决策模块中的驾驶人模型,设计模型预测控制器,使驾驶风格不仅体现在决策方面,同时统一在控制方面,以实现舒适安全的驾乘体验。本发明以合理化,舒适化,安全化,作为系统级目标,可以实现实时全面感知,个性决策制定,动态规划调整,高效控制合理,最终实现网联式的自动驾驶。
附图说明
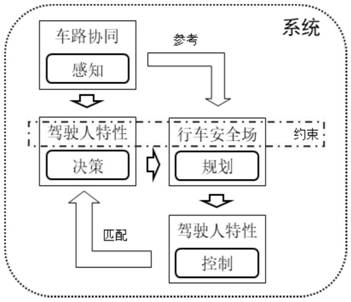
图1为本发明所提供系统的总体框架;
图2为本发明的一实例中车路协同感知模块传感器配置示意图;
图3为本发明的一实例中感知区域示意图;
图4为本发明的决策规划流程;
图5为本发明的一实例中规划最优轨迹示意图;
图6为考虑驾驶人特性整车控制框图。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,本发明的面向车路协同的智能驾驶行为决策规划系统中,包括:
车路协同感知模块、驾驶行为决策模块、行车安全场轨迹规划模块以及整车下层控制模块。在本发明一个优选实例中,给出了车载传感器与路侧传感器的搭配方案,安装位置与车路通信方式,如图2所示,具体为,车载(A)传感器和路侧(B)传感器主要由摄像头与雷达组成,其中,车辆前后与两侧各有一颗工业摄像头,车顶装载一颗64线激光雷达,四角各有一颗毫米波雷达,路侧架上装载两颗深度摄像头,一颗128线激光雷达,两颗32线激光雷达和四颗毫米波雷达。各传感器搭配后可实现感知区域的效果如附图3所示,路侧摄像头可覆盖的范围为500m,车载摄像头可覆盖的范围为车辆周围90m,激光雷达可辐射半径为150m,毫米波雷达可辐射单侧200m,由于路侧架设摄像头与雷达会有盲区,因此设置了激光雷达进行30米以内的视角补全。通过车路协同感知的配合,可以使车辆具有超视距的感知能力,并且,工业摄像头与深度摄像头的搭配为后续规划模块提供了参考路径点。
在车路协同通信方面,针对高速、大密度智能路网复杂交通环境通信需求,使用5G-V2X链路物理层与网络层相融合的信号同步和感知网络拥塞控制机制,解决高速大密度交通场景中无线网络资源利用率低与拥塞问题,保证车路协同通信的准确性与实时性。
驾驶行为决策模块建立驾驶人决策模型具体基于k-means的聚类算法,其公式为:
其中,
聚类所使用的指标为纵向加速度的最大值与最小值,方向盘转角变化率。通过聚类可将驾驶人分为三类:保守型驾驶人,一般性驾驶人,激进型驾驶人。通过对数据的分析,可以发现,不同类型驾驶人在决策同一场景时,会做出不同的决策反应,做出不同的驾驶行为,其反映在方向盘转角的变化,加减速度的变化,对此,本发明训练了决策模型并预置于系统选择中,驾乘人可以根据需求选择驾驶人模型,使得驾驶风格化更具体,以达到合理舒适的驾乘体验,具体的决策流程如附图4所示。利用驾乘人员的评价对所述驾驶人决策模型进行评价,以对该模型进行持续训练和更新。
考虑行车安全场轨迹规划模块,在车路协同感知模块中车辆得到了超视距的感知信息,并且工业摄像头与深度摄像头的搭配,可以规划出车辆可行驶点,如附图5所示。作为约束条件的行车安全场具体包括由道路上运动物体形成的动能场,静止物体形成的势能场和驾驶行为所决定的行为场,其理论模型为:
E
上式中,E
上述各部分具体表示为:
动能场:位于(x
势能场:静止物体i周围形成的势能场可表示为:
行为场:用表征驾驶行为的驾驶人风险因子和对应动能场场强的乘积表示为:
E
上述各式中,(x
以图5中变道超车为例,在决策模块做出超车决策动作时,系统会根据感知模块得到深度信息,提供若干可行驶轨迹点。
假设智能车辆在(x
此时,其周围产生的势能场场强为:
由于换道产生的行为场场强为:
E
所以,上述过程中的行车安全场场强为:E
由于车路协同感知可以检测出车辆周围目标,因此周围对智能车辆产生的势能场场强可求,且行为场场强与驾驶人模型有关,因此,采用不同的驾驶行为类型对应的参数求出行为场场强,而行为场场强与动能场场强直接相关,将行车安全场场强最小化,联合该驾驶行为所对应的加速度输出,共同约束出智能车辆的速度和转角,结合参考轨迹点,可以规划出最优轨迹。
本发明考虑驾驶行为设计了基于MPC的上层控制器,如附图6所示,其输入为规划模块中的最优轨迹,目标速度及智能车辆状态参数,输出控制量为智能车辆的方向盘转角,纵向加速度。设计了基于车辆动力系统逆模型的下层控制器,将上层控制器的加速度指令转化为可用于实际控制的节气门开度和制动压强。
应理解,本发明实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本发明实施例的实施过程构成任何限定。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种面向车路协同的智能驾驶行为决策规划方法及系统
- Q学习结合神经网络的智能驾驶行为决策系统的设计方法