无机械运动部件电磁式棋子受控自走智能棋盘系统
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及体育用品领域,尤其涉及无机械运动部件电磁式棋子受控自走智能棋盘系统。
背景技术
博弈棋牌类游戏中,带有棋盘的传统型棋类游戏广受人们喜爱,当今AI技术迅速发展更是对棋类游戏的发展起了推动作用,人工智能、深度学习等技术运用极大提高了电脑的棋类游戏水平,也进一步把人机棋类游戏变成了深受广大民众,接受和喜爱的娱乐方式,但电脑的显示方式又拉远了人与棋类游戏的距离,同时当今线上棋类游戏也在进一步开展。
经检索,中国专利号CN201910212653.9公开了一种下棋机器人的对弈方法,其需要三维机械臂系统和控制系统,其中包括大量各式步进电机和升降机构,且棋类娱乐机器人价格高,系统复杂,占地面积大,可靠性低,同时人类棋手肢体的作业面与机械臂作业面重复交叉,机械对人的伤害难以避免,带来了安全性低的问题。
发明内容
本发明的目的是为了解决现有技术中存在的缺陷,而提出的无机械运动部件电磁式棋子受控自走智能棋盘系统。
为了实现上述目的,本发明采用了如下技术方案:
无机械运动部件电磁式棋子受控自走智能棋盘系统,包括棋盘,所述棋盘的底面上固接有固定框,所述固定框的侧壁上滑动套接有顶杆,且固定框的内侧壁上滑动套接有底盘,所述底盘的侧壁上开设有凹槽一,所述凹槽一的侧壁上安装有弹簧,所述弹簧的另一端固接有卡杆,所述卡杆与凹槽一滑动套接,且卡杆的另一端延伸至凹槽一外,所述卡杆的伸出端与顶杆接触连接,且底盘的顶面上安装有磁芯。
进一步地,所述棋盘的顶面上滑动连接有棋子,所述棋子内开设有凹槽,所述凹槽内安装有磁体。
进一步地,所述磁芯设置有多组,且多组磁芯组成磁芯阵列,所述卡杆的端面为弧形面。
进一步地,所述棋盘的顶面设有棋子博弈区,且顶面的两侧分别开设有棋子候补待用区,所述弹簧、卡杆和顶杆分别设置有三组,且三组弹簧、卡杆和顶杆分别关于棋盘的竖直平分面对称设置。
进一步地,所述顶杆通过弹簧和卡杆实现棋盘、固定框和底盘的相互位置固定。
进一步地,还包括棋子位置侦测模块、电脑、行棋指令模块、控制面板、磁场单元控制模块和磁场供电模块,所述棋子位置侦测模块用于检测棋子位于棋盘上的位置,并将位置传输至电脑内,所述电脑用于运行下棋程序,并将下棋程序传递至行棋指令模块内,所述行棋指令模块用于将下棋程序转化为命令,并将命令传递至控制面板内,所述控制面板用于接收命令,并控制磁场单元控制模块的启闭,所述磁场单元控制模块用于精确控制磁场供电模块的电流大小和电流方向,并调整磁芯阵列中各个磁芯的磁场强度与磁极方向,其中,所述磁场供电模块用于向磁芯阵列供电。
相比于现有技术,本发明的有益效果在于:
1、当棋子的电磁合力大于重力产生的摩擦力时,棋子就会移动,实现移位,而出发位置和目的位置不是相邻位置时,则可以先移动到距离目的位置较近的相邻位置,并重复此过程,就可实现较远距离的棋子移动,达到提高棋手下棋体验的目的,同时系统无机械运动结构,简单可靠,造价低廉,可防止机械部件对人造成伤害,从而提高安全性。
2、棋子位置侦测模块侦测每个棋子的位置,并将位置信息传递至电脑内,电脑再通过控制面板控制磁场单元控制模块,使得磁场单元控制模块控制每个棋子下方的磁场供电模块供电,使得磁芯产生正向磁场,从而使其上方棋子内的磁体产生低强度定位磁力,通过低强度定位磁力对棋子产生吸附,从而增加了定位的准确性,并防止棋子倾覆,同时低强度定位磁力力量较弱,棋子可在棋手或其他人施加的较小外力作用下拿起或移动,方便操作。
综上所述,该装置能够解决现有的问题。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
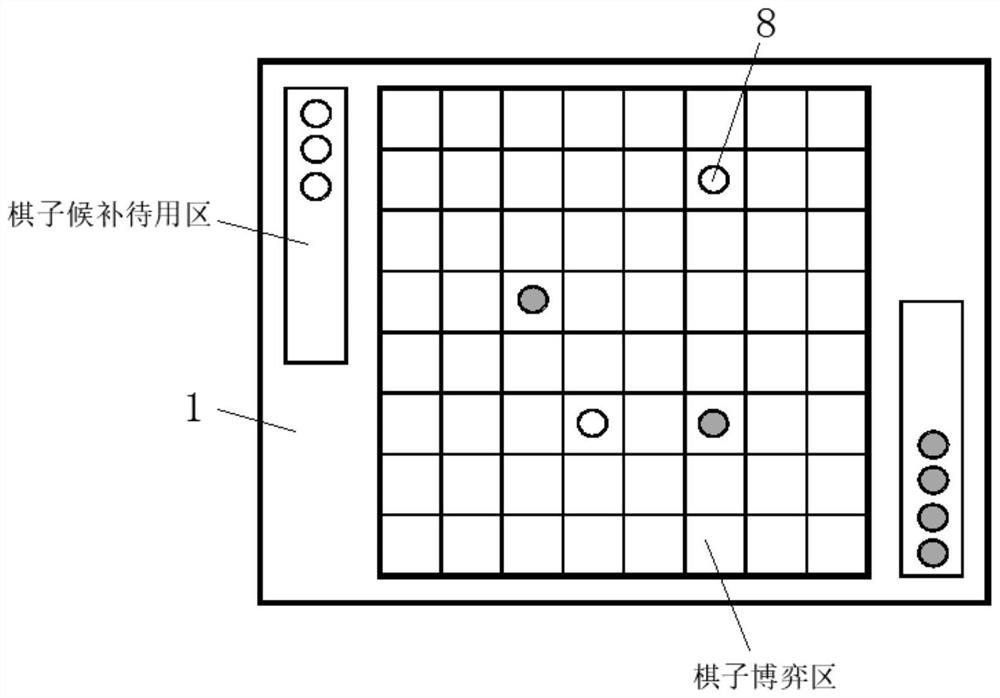
图1为本发明提出的无机械运动部件电磁式棋子受控自走智能棋盘系统的整体结构俯视图;
图2为本发明提出的无机械运动部件电磁式棋子受控自走智能棋盘系统的棋盘结构分散图;
图3为本发明提出的无机械运动部件电磁式棋子受控自走智能棋盘系统的棋子结构截面图;
图4为本发明提出的无机械运动部件电磁式棋子受控自走智能棋盘系统的棋子定位示意图;
图5为本发明提出的无机械运动部件电磁式棋子受控自走智能棋盘系统的棋子移位俯视作用力示意图;
图6为本发明提出的无机械运动部件电磁式棋子受控自走智能棋盘系统的棋子移位正视作用力示意图;
图7为本发明提出的无机械运动部件电磁式棋子受控自走智能棋盘系统的底盘部分结构截面图;
图8为本发明提出的无机械运动部件电磁式棋子受控自走智能棋盘系统的模块结构运行图。
图中:1、棋盘;2、固定框;3、底盘;4、弹簧;5、卡杆;6、顶杆;7、磁芯;8、棋子;9、磁体。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
参照图1-8,无机械运动部件电磁式棋子受控自走智能棋盘系统,包括棋盘1,棋盘1的底面上固接有固定框2,固定框2的侧壁上滑动套接有顶杆6,且固定框2的内侧壁上滑动套接有底盘3,底盘3的侧壁上开设有凹槽一,凹槽一的侧壁上安装有弹簧4,弹簧4的另一端固接有卡杆5,卡杆5与凹槽一滑动套接,且卡杆5的另一端延伸至凹槽一外,卡杆5的伸出端与顶杆6接触连接,且底盘3的顶面上安装有磁芯7,当需要检修底盘3上的磁芯7时,按压固定框2上的顶杆6,使得顶杆6推动卡杆5挤压弹簧4,使得弹簧4收缩,储存弹性势能,便于卡杆5的复位,从而使得底盘3可移出固定框2,达到便于检修的目的。
棋盘1的顶面上滑动连接有棋子8,棋子8内开设有凹槽,凹槽内安装有磁体9,使得结构合理,便于系统的运行。
磁芯7设置有多组,且多组磁芯7组成磁芯阵列,卡杆5的端面为弧形面,使得棋子8定位更加准确,棋子8移动时运行状态更加平稳。
棋盘1的顶面设有棋子博弈区,且顶面的两侧分别开设有棋子候补待用区,弹簧4、卡杆5和顶杆6分别设置有三组,且三组弹簧4、卡杆5和顶杆6分别关于棋盘1的竖直平分面对称设置。
顶杆6通过弹簧4和卡杆5实现棋盘1、固定框2和底盘3的相互位置固定。
还包括棋子位置侦测模块、电脑、行棋指令模块、控制面板、磁场单元控制模块和磁场供电模块,棋子位置侦测模块用于检测棋子8位于棋盘1上的位置,并将位置传输至电脑内,电脑用于运行下棋程序,并将下棋程序传递至行棋指令模块内,行棋指令模块用于将下棋程序转化为命令,并将命令传递至控制面板内,控制面板用于接收命令,并控制磁场单元控制模块的启闭,磁场单元控制模块用于精确控制磁场供电模块的电流大小和电流方向,并调整磁芯阵列中各个磁芯7的磁场强度与磁极方向,其中,磁场供电模块用于向磁芯阵列供电,达到提高棋手下棋体验的目的,同时系统无机械运动结构,简单可靠,造价低廉,可防止机械部件对人造成伤害,从而提高安全性。
本发明的工作原理及使用流程:当系统处于棋子8定位状态时,棋子位置侦测模块侦测每个棋子8的位置,并将位置信息传递至电脑内,电脑再通过控制面板控制磁场单元控制模块,使得磁场单元控制模块控制每个棋子8下方的磁场供电模块供电,使得磁芯7产生正向磁场,从而使其上方棋子8内的磁体9产生低强度定位磁力,通过低强度定位磁力对棋子8产生吸附,从而增加了定位的准确性,并防止棋子8倾覆,同时低强度定位磁力力量较弱,棋子8可在棋手或其他人施加的较小外力作用下拿起或移动,当棋子8需要移动时,如果出发位置和目的位置是相邻位置,则电脑通过行棋指令模块向控制面板发送指令,从而使得控制面板打开磁场单元控制模块,使得磁场单元控制模块控制出发位置下方的磁场供电模块反向供电,进而使得磁芯7的磁场反向,使得出发位置磁场由吸引变为推举,棋子8变为磁悬浮状态,而目的位置磁场由无磁力变为吸引,当棋子8电磁合力大于重力产生的摩擦力,棋子8就会移动,实现移位,而出发位置和目的位置不是相邻位置时,则可以先移动到距离目的位置较近的相邻位置,并重复此过程,就可实现较远距离的棋子8移动,达到提高棋手下棋体验的目的,同时系统无机械运动结构,简单可靠,造价低廉,可防止机械部件对人造成伤害,从而提高安全性,完成操作。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 无机械运动部件电磁式棋子受控自走智能棋盘系统
- 无机械运动部件电磁式棋子受控自走智能棋盘系统