一种仿生机器人的多角度摆臂机构
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及工业机械臂技术领域,具体为一种仿生机器人的多角度摆臂机构。
背景技术
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
但是现在的机械手臂基本通过电机进行驱动,而电机电路的防水性能差,需求精密度高、成本大,一般性电机驱动的机械手臂在一些相对潮湿、有水的场合并不适用,且长久使用容易坏死,适用范围较窄。
为了解决上述问题,本案由此而生。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种仿生机器人的多角度摆臂机构,解决了上述背景技术中提出的问题。
(二)技术方案
为实现以上目的,本发明通过以下技术方案予以实现:一种仿生机器人的多角度摆臂机构,包括机架、转臂,所述机架的一侧通过驱动部件与转臂连接,所述驱动部件包括驱动件和传动件,所述驱动件与传动件相连,传动件与转臂相连,所述机架上连接有水箱,水箱上设有水泵,驱动件与传动件分别通过水压导管与水泵的输出端连接,传动件在水泵的水压作用下带动转臂做翻转作业,驱动件在水泵的水压作用下带动转臂做旋转作业。
优选的,所述驱动件包括纵截面呈圆形的驱动架、设于驱动架内部的固定挡板和转动板,所述挡板和转动板将驱动架内部分隔成相互独立的腔室一和腔室二,所述驱动架的一侧枢接有圆盘状的旋转盖板,所述圆盘状转板的的内侧连接有一转动轴,所述旋转盖板的内侧与转动轴的外缘固定,外侧与驱动架贴合,所述固定挡板的外侧与驱动架的内壁固定连接,内侧与转动轴相衔接。
优选的,所述水泵设有两个,水泵的输出端分别通过水压导管连通至腔室一和腔室二内。
优选的,所述传动件通过旋转盖板进行转动,传动件包括支撑座、外端连接转臂的球体、球体转动接头,所述支撑座与旋转盖板的外侧相连,球体转动接头设于支撑座一侧,球体设于球体转动接头内,其两侧分别通过升降件调整转动,所述升降件设于旋转盖板的外侧。
优选的,所述升降件包括L形的支座、支块、升降座,所述支座的一端与球体一侧设置的连接块相铰接,另一端与旋转盖板相连,所述支块的一端与球体的另一侧设置的连接块相铰接,所述升降座上设有活塞头,底部通过连通导管连通至其中一个水压导管,所述活塞头的外侧端与支块相连,内侧通过小弹簧与升降座内壁的底部相连,所述水压导管和连通导管上均设有阀门。
优选的,所述支座的竖直部设有缓冲弹簧,支座与支块分别设于球体的两侧并位于球体同一径向线上。
(三)有益效果
采用上述技术方案后,本发明与现有技术相比,具备以下优点:本发明一种仿生机器人的多角度摆臂机构,设置驱动件和传动件作为驱动摆臂转动和旋转的双驱动位,并采用水压作为驱动端以分别填充相应连接工位腔室的方式,实现摆臂的多角度运行,且完成机械臂的仿水驱动,同时,摆臂处使用水压驱动,避免使用电机等电设备进行驱动,间接实现防水的效果。
附图说明
图1为本发明示意图;
图2为本发明驱动件结构剖面示意图;
图3为本发明传动件结构示意图;
图4为本发明升降座结构正面剖视图。
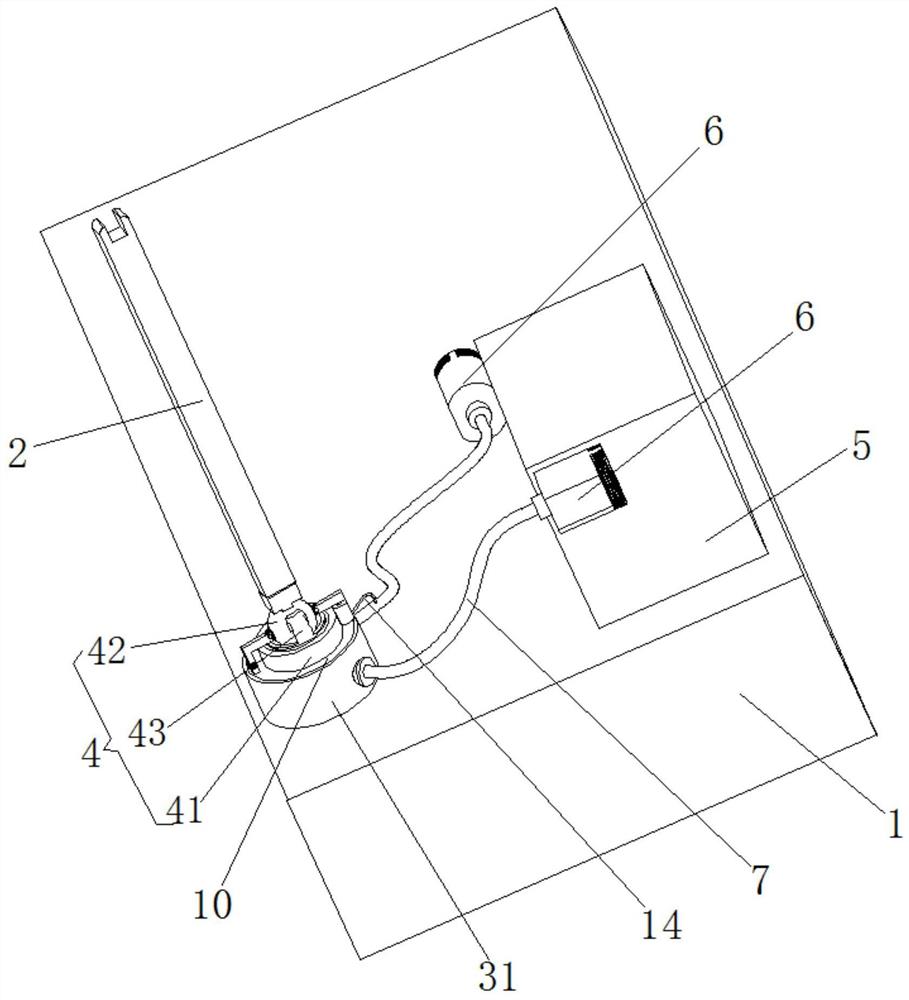
图中:1机架、2转臂、3驱动件、31驱动架、32固定挡板、33转动板、4传动件、41支撑座、42球体、43球体转动接头、5水箱、6水泵、7水压导管、8腔室一、9腔室二、10旋转盖板、11转动轴、12升降件、121支座、122支块、123升降座、13活塞头、14连通导管、15小弹簧、16缓冲弹簧。
具体实施方式
下面通过附图和实施例对本发明作进一步详细阐述。
如图1-4所示:一种仿生机器人的多角度摆臂机构,包括机架1、转臂2,机架1的一侧通过驱动部件与转臂2连接,驱动部件包括驱动件3和传动件4,驱动件3与传动件4相连,传动件4与转臂2相连,机架1上连接有水箱5,水箱5上设有水泵6,驱动件3与传动件4分别通过水压导管7与水泵6的输出端连接,传动件4在水泵6的水压作用下带动转臂2做翻转作业,驱动件3在水泵6的水压作用下带动转臂2做旋转作业。
驱动件3包括纵截面呈圆形的驱动架31、设于驱动架31内部的固定挡板32和转动板33,挡板和转动板33将驱动架31内部分隔成相互独立的腔室一8和腔室二9,驱动架31的一侧枢接有圆盘状的旋转盖板10(衔接处需要做防水处理),圆盘状转板的的内侧连接有一转动轴11,旋转盖板10的内侧与转动轴11的外缘固定,外侧与驱动架31贴合,固定挡板32的外侧与驱动架31的内壁固定连接,内侧与转动轴11相衔接。
水泵6设有两个,水泵6的输出端分别通过水压导管7连通至腔室一8和腔室二9内。
驱动件3中的转动板33可进行顺时针或逆时针转动,具体过程如下。
(以附图2为例)顺时针转动:其中一个水泵6(相对下方)开启,将水由水箱5抽至转动架的腔室一8内,推动转动板33顺时针方向进行转动,转动的速度可由水泵6泵送水的水压值控制,转动板33转动过程中带动转动轴11转动,使得旋转盖板10能够通过带动传动件4转动,间接实现带动摆臂做顺时针转动。
逆时针转动:另一个水泵6开启,将水由水箱5抽至转动架的腔室二9内,推动转动板33逆时针方向进行转动,转动板33转动过程中带动转动轴11转动,使得旋转盖板10能够通过带动传动件4转动,间接实现带动摆臂做逆时针转动。
此时腔室一8内的水由于没有受到水压作用,会从相应的水压导管7回流,可在腔室一8与腔室二9内设置连通水箱5的导管,并通过阀门控制。
参见附图3-4,传动件4通过旋转盖板10进行转动,传动件4包括支撑座41、外端连接转臂2的球体42、球体转动接头43,支撑座41与旋转盖板10的外侧相连,球体转动接头43设于支撑座41一侧,球体42设于球体转动接头43内,其两侧分别通过升降件12调整转动,升降件12设于旋转盖板10的外侧。
球体转动接头43起到限制球体42位置的作用,同时能够允许球体42能够进行一定的自由度无规则角度转动。
升降件12包括L形的支座121、支块122、升降座123,支座121的一端与球体42一侧设置的连接块相铰接,另一端与旋转盖板10相连,支块122的一端与球体42的另一侧设置的连接块相铰接,升降座123上设有活塞头13,底部通过连通导管14连通至其中一个水压导管7,活塞头13的外侧端与支块122相连,内侧通过小弹簧15与升降座123内壁的底部相连,水压导管7和连通导管14上均设有阀门。
常态下支块122和支座121处于平衡状态并两者的顶端位于同一高度。
连通导管14通水至升降座123后使得活塞头13向上移动,带动支块122上升,不通水时小弹簧15带动活塞头13向下移动,从而实现球体42的两侧旋转,需注意的是,球体42的旋转配合驱动件3底部的转动,可以实现周向无规则的运动。
支座121的竖直部设有缓冲弹簧16,支座121与支块122分别设于球体42的两侧并位于球体42同一径向线上。
以上所述依据实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明思想的范围内,进行多样的变更以及修改。本项使用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其保护的范围。
- 一种仿生机器人的多角度摆臂机构
- 一种火切机摆臂多角度传动装置