搬运系统、搬运方法及存储介质
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及搬运系统、搬运方法及程序。
背景技术
在预定的建筑物、设施内自主移动的自主移动装置的开发正在推进。这样的自主移动装置通过具有货台或者牵引台车,能够成为自动配送货物的自动配送装置。自动配送装置通过从出发地自主移动至目的地,例如能够将在出发地搭载的货物送到目的地。
例如美国专利第9026301号说明书所记载的自动配送装置具有能够自主移动的牵引部及货台部,它们中包含的计算机保存有建筑物的布局图的电子地图及在从某场所向下一场所移动时应该追寻的路径。该自动配送装置通过根据目的使用不同类型的货台部而搬运各种各样的物品。
发明内容
搬运机器人被期望快速搬运被搬运物。但是,若因快速搬运被搬运物而向被搬运物施加振动、冲击,则有可能产生被搬运物发生散包等不良情况。另外,即使被搬运物的种类相同,在被搬运物的状态不稳定的情况下,也容易产生这样的不良情况。然而,在检测静止状态下的被搬运物的重心位置来判定稳定度的方法中,无法判定搬运状态是否稳定。
本发明为了解决这样的课题而完成,提供能够适宜地搬运被搬运物的搬运系统等。
本发明的一方案中的搬运系统具有搬运装置、控制部、信息接受部及设定部。搬运装置搬运被搬运物。控制部控制搬运装置的动作。信息接受部对于表示搬运状态下的被搬运物的稳定度的信息,接受来自用户的输入。设定部基于接受到的信息来向控制部设定搬运装置的动作参数。
搬运系统通过上述的结构,能够根据来自用户的输入而设定与搬运时的稳定度相关联的动作参数。因而,能够不管静止状态的被搬运物的状态而适宜地搬运被搬运物。
在上述搬运系统中,可以是,信息接受部提示使用户选择稳定度用的选项,并且接受由用户选择出的选项作为输入。由此,用户能够容易地输入稳定度信息。
在上述搬运系统中,可以是,搬运装置是在预先设定的区域内自主移动的搬运机器人。由此,搬运系统能够控制搬运机器人的动作。
在上述搬运系统中,可以是,设定部设定上述搬运机器人的移动加速度和搬运机器人通行的移动路径中的至少任一方作为动作参数。由此,搬运机器人能够抑制被搬运物接受的外力。
在上述搬运系统中,可以是,上述搬运机器人具有对存在于上述搬运机器人的周边的物体进行检测的物体传感器,设定部设定物体传感器的检测范围作为动作参数。由此,搬运系统能够抑制障碍物意外地与搬运机器人碰撞等事态,抑制被搬运物的散包等。
在上述搬运系统中,可以是,上述搬运机器人具有向上述搬运机器人的周边通知正在搬运被搬运物的通知装置,设定部设定通知装置的通知水平作为动作参数。由此,搬运系统能够抑制障碍物意外地与搬运机器人碰撞等事态,抑制被搬运物的散包等。
在上述搬运系统中,可以是,上述搬运机器人具有用于使收容被搬运物的推车升降的升降机构,设定部设定升降机构的升降加速度作为动作参数。由此,搬运系统能够在升降动作中抑制被搬运物的散包等。
在上述搬运系统中,可以是,信息接受部设置于上述推车,上述推车将接受到的信息向设定部发送。由此,搬运系统能够针对每个推车输入信息,因此用户的操作变得容易。
在上述搬运系统中,可以是,搬运装置是使在预先设定的区域内通过自主移动而搬运被搬运物的搬运机器人升降的电梯,设定部设定电梯的移动加速度作为动作参数。由此,搬运系统能够综合且适宜地搬运被搬运物。
本发明的一方案中的搬运方法对用于搬运被搬运物的驱动装置的动作进行控制,其中,具有信息接受步骤、设定步骤及控制步骤。信息接受步骤对于表示搬运状态下的被搬运物的稳定度的信息,接受来自用户的输入。设定步骤基于接受到的信息来设定驱动装置的动作参数。控制步骤通过设定的动作参数来控制搬运装置。
搬运方法通过上述的结构,能够根据来自用户的输入而设定与搬运时的稳定度相关联的动作参数。因而,能够不管静止状态的被搬运物的状态而适宜地搬运被搬运物。
本发明的一方案中的程序使计算机执行对用于搬运被搬运物的驱动装置的动作进行控制的控制方法,其中,具有信息接受步骤、设定步骤及控制步骤。信息接受步骤对于表示搬运状态下的被搬运物的稳定度的信息,接受来自用户的输入。设定步骤基于接受到的信息来设定驱动装置的动作参数。控制步骤通过设定的动作参数来控制搬运装置。
程序通过上述的结构,能够根据来自用户的输入而设定与搬运时的稳定度相关联的动作参数。因而,能够不管静止状态的被搬运物的状态而适宜地搬运被搬运物。
通过本发明,能够提供能够适宜地搬运被搬运物的搬运系统等。
本公开的上述和其他的目的、特征及优点将会根据下文给出的详细描述和附图而被更充分地理解,附图仅以示意的方式给出,因此不应被认为限制本公开。
附图说明
图1是实施方式1的搬运系统的概观图。
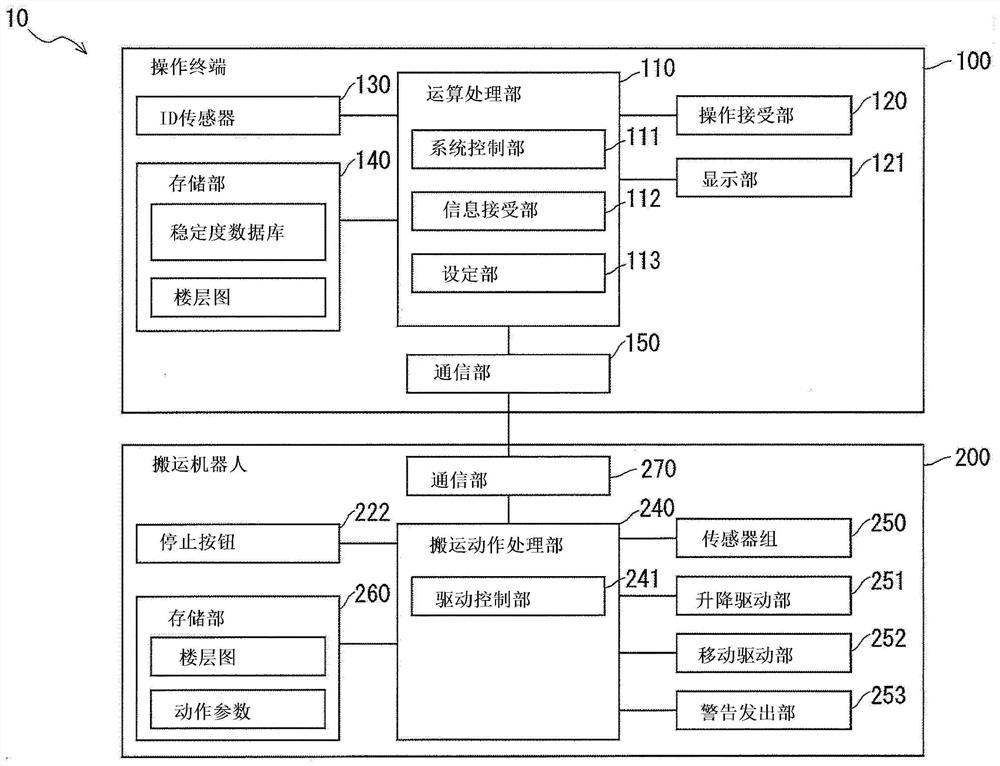
图2是实施方式1的搬运系统的框图。
图3是示出利用搬运系统的例子的第一图。
图4是示出利用搬运系统的例子的第二图。
图5是示出利用搬运系统的例子的第三图。
图6是示出利用搬运系统的例子的第四图。
图7是示出与稳定度相关的数据库的例子的表。
图8是示出搬运系统的处理的流程图。
图9是示出操作装置的操作画面的例子的第一图。
图10是示出操作装置的操作画面的例子的第二图。
图11是示出操作装置的操作画面的例子的第三图。
图12是实施方式2的搬运系统的框图。
图13是示出实施方式2的稳定度数据库的例子的表。
具体实施方式
以下,通过发明的实施方式来说明本发明,但并不将权利要求书的发明限定于以下的实施方式。另外,不一定在实施方式中说明的结构的全部作为用于解决课题的手段是必须的。为了说明的清楚化,以下的记载及附图适当进行了省略及简化。需要说明的是,在各附图中,对同一要素标注有同一附图标记,根据需要而省略重复说明。
<实施方式1>
参照图1对实施方式1的搬运系统进行说明。在搬运系统中,在预定的区域内自主移动的搬运机器人搬运收容有被搬运物的推车。图1是实施方式1的搬运系统的概观图。图1所示的搬运系统10是搬运系统的一实施方案。搬运系统10能够在例如医院等设施内将患者的餐食从厨房搬运,或将患者吃饭后的餐具向厨房搬运,或将衣服、床上用品等向预先设定的场所搬运等。搬运系统10具有操作装置100、搬运机器人200及推车300作为主要的结构。
需要说明的是,作为用于说明构成要素的位置关系的为了方便的手段,图1被标注了右手系的正交坐标系。另外,在图2以后的图中标注有正交坐标系的情况下,图1的X轴、Y轴及Z轴方向和这些正交坐标系的X轴、Y轴及Z轴方向分别一致。
操作装置100是与搬运机器人200以能够无线通信的方式连接且用于对搬运机器人200发出与各种任务相关的指示的装置。操作装置100例如是平板终端,在内部包括用于控制搬运系统整体的运算处理部110等。另外,操作装置100具有:显示部121,用于将各种信息向用户U提示;及操作接受部120,是重叠于显示部121的触摸面板,是用于供用户U进行操作的接口。
在显示部121的旁边设置有ID传感器130。ID传感器130辨识操作搬运机器人200的用户U的ID(Identification:身份证明),例如检测用户U分别拥有的ID卡中包含的固有的标识符。ID传感器130例如包括用于进行无线标签的信息读取的天线。用户U通过将ID卡接近ID传感器130来使搬运机器人200识别作为操作者的用户的ID。
搬运机器人200是在医院的地面上移动的自主移动机器人。搬运机器人200将收容于推车300的被搬运物从预定的位置(出发地)搬运至别的位置(目的地)。搬运机器人200具有主体块210、手把块220及控制块230作为主要的结构。需要说明的是,在以后的说明中,有时将搬运机器人200从预定的场所移动至出发地且保持被搬运物而搬运至目的地称作回收被搬运物。
主体块210呈主面接地的扁平长方体形状。主体块210的主面的高度被设定为能够进入推车300的下部的高度。由此,主体块210进入推车300的下部,从下方抬起推车300。主体块210具有升降部211、测距传感器212、驱动轮213、从动轮214及扬声器215作为主要的结构。
升降部211是设置于主体块210的上表面中央部的平板状的部件,在上侧(z轴正侧)具有大致平滑的抵接面。抵接面以与地面(xy面)平行且朝上的方式设置。在升降部211的下侧设置有用于使升降部211升降的升降机构(未图示)。通过升降机构,升降部211能够使抵接面上下并在预先设定的位置处停止。由此,升降部211构成为,能够与推车300的下部抵接,与地面平行地抬起推车300,并保持推车300。
测距传感器212是能够检测搬运机器人200和搬运机器人200的周边的物体并测定与检测到的物体的距离的传感器。测距传感器212例如通过红外线、激光或毫米波等来检测搬运机器人200与周边的物体的相对的位置。测距传感器212也可以被称作物体传感器。测距传感器212分别设置于主体块210的前方及后方。由此,测距传感器212能够在搬运机器人200的任意的移动方向上存在障碍物的情况下检测该情况。
搬运机器人200对与测距传感器212检测到的障碍物的距离设定安全距离。搬运机器人200以使障碍物离得比安全距离远的方式控制搬运机器人200的自主移动。另外,搬运机器人200在障碍物接近成比安全距离近的情况下,使搬运机器人200的移动暂且停止,或者发出相对于障碍物的警告。
驱动轮213接地于地面而支承主体块210,并且使主体块210移动。主体块210具有在搬运机器人200的前后方向(x轴方向)的中央部处以分离的方式枢轴支承于在左右方向(y轴方向)上延伸的1根旋转轴上的2个驱动轮213。2个驱动轮213构成为能够以旋转轴为中心分别独立地旋转。搬运机器人200通过使左右配置的驱动轮213以相同的转速驱动来进行前进或后退,通过使左右的驱动轮213的转速或旋转方向产生差来进行转弯。
从动轮214接地于地面而支承主体块210,并且按照驱动轮213的动作而自由旋转。主体块210在驱动轮213的前后方向分别具有从动轮214。即,主体块210在矩形状的接地面的四角分别具有从动轮214。
扬声器215用于发出预先设定的语音。扬声器215以使发出的语音能够相对于存在于搬运机器人200的周边的通行人等识别的方式设置。由此,搬运机器人200能够经由扬声器215而对通行人等发出对于搬运机器人200的存在催促注意等的警告。
手把块220在利用者利用人力牵引搬运机器人200的情况下利用。手把块220具有在主体块210的上表面且后方端部处在左右方向上分离且平行地立起设置的2根柱状构件221a和将2根柱状构件221a的上端部悬架(架桥)的把手部221b。在2根柱状构件221a中的1根的上端部设置有停止按钮222。通过停止按钮222被按下,搬运机器人200使自主移动停止。
控制块230包括用于控制搬运机器人200的驱动的CPU(Central ProcessingUnit:中央处理单元)、电路等。控制块230设置于搬运机器人200的任意的位置,根据从操作装置100接受到的指示来控制搬运机器人200。另外,控制块230将从搬运机器人200的传感器等取得的信息适当向操作装置100发送。
搬运机器人200具有姿势传感器。姿势传感器是固定于搬运机器人200的任意的位置且检测正交3轴的各轴方向的加速度和绕各轴的角速度的6轴传感器,检测搬运机器人200的姿势的变化。例如,姿势传感器在搬运机器人200在斜面上通行的情况下,检测伴随于地面的倾斜的搬运机器人200的倾斜。
推车300是收容多个被搬运物400的被搬运物收容体。推车300通过结合多个框架301而形成四棱柱形状的框体,在底面部的四角分别设置有脚轮320。
在从底面部起预先设定的高度的位置,与地面平行地设置有底板302。从地面到底板302的下表面为止的高度确保了搬运机器人200的主体块210能够进入的高度。底板302的下表面供搬运机器人200的抵接面抵接。
在推车300的框体的内侧,与地面平行地且互相分离地设置有多个架板310。构成为在架板310的上表面放置被搬运物400。被搬运物400例如是用于供医院的患者吃饭的托盘,包括装在托盘上的餐具。另外,有时在餐具中包括患者吃剩的食品。
需要说明的是,图1所示的推车300构成为收容上述的托盘,但推车300能够根据收容的被搬运物而具有各种结构。例如,在用于收容床上用品的推车300中,底板302的上侧也可以取代架板310而由筐状或袋状的构件构成。另外,推车300也可以是固定有操作装置100的结构。在推车300和操作装置100成为了一体的情况下,操作装置100被设定成进行相对于固定的推车300的操作。即,用户U能够省略选择推车300的操作。因而,用户能够容易地输入与对应于推车300的稳定度相关的信息。另外,推车300也可以是不具有脚轮320的结构。
接着,参照图2对搬运系统的系统结构进行说明。图2是实施方式1的搬运系统的框图。在搬运系统10中,操作装置100和搬运机器人200以互相能够通信的方式连接。
操作装置100具有运算处理部110、操作接受部120、显示部121、ID传感器130、存储部140及通信部150作为主要的结构。
运算处理部110是具有CPU(Central Processing Unit:中央处理单元)等运算装置的信息处理装置。运算处理部110包括运算处理部110所具有的硬件和保存于该硬件的程序。即,运算处理部110执行的处理由硬件和软件的任一者实现。运算处理部110包括系统控制部111、信息接受部112及设定部113。
系统控制部111从操作装置100的各结构接收信息,根据接收到的信息而向各结构发出各种指示。
信息接受部112接受从用户输入的稳定度信息。本实施方式中的“稳定度信息”是表示搬运状态下的被搬运物400的稳定度的信息。稳定度信息通过用户进行预先设定的输入操作而设定。
设定部113接收信息接受部112接受到的稳定度信息,并且参照存储部140存储的稳定度数据库,将搬运机器人的动作参数向驱动控制部241设定。搬运机器人的动作参数例如是驱动升降部211时的加速度、驱动驱动轮213时的加速度或最大速度等。
操作接受部120接受来自用户的输入操作,将操作信号向运算处理部110发送。作为接受来自用户的输入操作的单元,操作接受部120具有重叠于显示部121的触摸面板。需要说明的是,操作接受部120也可以取代触摸面板或在触摸面板的基础上具有按钮、手柄等操作单元。用户U操作这些输入操作单元来进行电源的接通、断开、各种任务的输入操作等。
显示部121例如是包括液晶面板的显示部,显示与搬运系统10相关的各种信息。在显示部121重叠有接受来自用户U的操作的触摸面板,显示与触摸面板联动的内容。
ID传感器130连接于运算处理部110,将与检测到的ID相关的信息向运算处理部110供给。
存储部140包括快闪存储器、SSD(Solid State Drive:固态驱动器)等非易失性存储器,例如存储有稳定度数据库及楼层图。存储部140连接于运算处理部110,根据来自运算处理部110的要求而将存储的信息向运算处理部110供给。稳定度数据库是将与被搬运物400的稳定度相关的信息和搬运机器人200的动作参数建立了关联的信息。对于稳定度数据库的详情后述。楼层图是搬运机器人200为了进行自主移动而使用的设施的楼层图。在楼层图中,包括成为搬运机器人200自主移动的路线的候补的区域的信息、放置推车300的场所及将推车300搬运而送达的场所的信息等。
通信部150是与搬运机器人200以能够通信的方式连接的接口,例如由天线及进行经由天线而发送的信号的调制或解调的电路等构成。通信部150连接于运算处理部110,将通过无线通信而从搬运机器人200接收到的预定的信号向运算处理部110供给。另外,通信部150将从运算处理部110接收到的预定的信号向搬运机器人200发送。
搬运机器人200具有停止按钮222、搬运动作处理部240、传感器组250、升降驱动部251、移动驱动部252、警告发出部253、存储部260及通信部270。
停止按钮222连接于搬运动作处理部240,将停止按钮被按下的情况下的信号向搬运动作处理部240供给。
搬运动作处理部240是具有CPU等运算装置的信息处理装置,从搬运机器人200的各结构取得信息,并且对各结构发送指示。搬运动作处理部240包括驱动控制部241。驱动控制部241控制升降驱动部251、移动驱动部252及警告发出部253的动作。驱动控制部241在从设定部113接收到与动作参数相关的信息的情况下,按照接收到的信息而进行升降驱动部251、移动驱动部252及警告发出部253的控制处理。
传感器组250对搬运机器人200所具有的各种传感器进行总称,包括测距传感器212及姿势传感器。传感器组250连接于搬运动作处理部240,将检测到的信号向搬运动作处理部240供给。传感器组250除了测距传感器212之外,例如也可以包括设置于升降部211的位置传感器、设置于驱动轮213的旋转编码器等。另外,传感器组250除了上述的传感器之外,例如也可以包括检测主体块210的倾斜的姿势传感器。
升降驱动部251包括用于驱动升降部211的电动机驱动器。升降驱动部251连接于搬运动作处理部240,接受来自驱动控制部241的指示而驱动。在来自驱动控制部241的指示中,例如包括用于指定电动机的动作加速度的信号。
移动驱动部252包括用于分别驱动2个驱动轮213的电动机驱动器。移动驱动部252连接于搬运动作处理部240,接受来自驱动控制部241的指示而驱动。在来自驱动控制部241的指示中,例如包括用于指定电动机的动作加速度(搬运机器人200的移动加速度)的信号。
警告发出部253是用于经由扬声器215而对存在于搬运机器人200的周边的通行人等发出警告的通知装置,包括驱动扬声器215的驱动器。警告发出部253连接于搬运动作处理部240,接受来自驱动控制部241的指示而驱动。在来自驱动控制部241的指示中,例如包括用于指定通知警告时的音量(通知水平)的信号。
存储部260包括非易失性存储器,存储楼层图及动作参数。楼层图是搬运机器人200自主移动所需的数据库,包括与操作装置100的存储部140存储的楼层图的至少一部分相同的信息。动作参数包括在从操作装置100接受了与动作参数相关的指示的情况下用于将与接受到的指示对应的动作向各结构指示的信息。
接着,参照图3~图6,对搬运机器人200搬运推车300的动作的一例进行说明。在此说明的推车300收容医院的住院患者吃饭后的收拾托盘(餐后的餐盘)。搬运机器人200执行搬运收容有收拾托盘的推车300这一任务。
图3是示出利用搬运系统的例子的第一图。推车300在医院内配置于住院患者停留的病房的附近。配置推车300的位置预先设定,搬运机器人200能够通过自主移动而向推车300附近移动。例如,住院患者P使作为被搬运物400的收拾托盘向推车300收容。当在推车300收容收拾托盘后,能够操作搬运系统10的操作装置100的用户U操作操作装置100而输入搬运推车300的任务。从操作装置100接受了指示的搬运机器人200开始从待机的预定的场所到推车300所在的场所为止的移动。
图4是示出利用搬运系统10的例子的第二图。图4示出了从预定的场所移动至推车300所在的场所的搬运机器人200为了搬运推车300而正在接近推车300的状态。搬运机器人200从前方向推车300的下部进入。此时,升降部211被设定于比推车300的底板302低的位置。
图5是示出利用搬运系统的例子的第三图。搬运机器人200在升降部211位于推车300的中央附近的场所处暂且停止。接着,搬运机器人200进行使升降部211上升而与底板302抵接并将推车300抬起的动作。
图6是示出利用搬运系统的例子的第四图。图6示出了通过升降部211上升而搬运机器人200抬起了推车300的状态。升降部211在图6所示的位置处停止。由此,推车300的脚轮320成为了从地面离开的状态。搬运机器人200在这样将收容有被搬运物400的推车300从地面抬起的状态下搬运至目的地。
搬运机器人200通过如上所述的动作而搬运推车300。收容于推车300的被搬运物400在由搬运机器人200抬起时接受伴随于升降动作的冲击。另外,被搬运物400在搬运机器人200在地面上移动时,通过搬运机器人200进行的加速、减速、转弯及地面的台阶而被施加冲击或振动之类的外力。若因这样被施加外力而餐盘的餐具倒下或者残留于餐具内的食品洒出,则推车300、搬运机器人200进而地面有可能被洒出的食品污染。
因而,在搬运在搬运时不稳定的餐盘的情况下,想要通过使搬运机器人200的加速度相对慢来抑制餐盘接受的外力并且抑制食品洒出。于是,本实施方式中的搬运系统10构成为,通过用户U输入与被搬运物400的稳定度相关的信息来设定搬运机器人200的动作参数。
参照图7,对与被搬运物400的稳定度相关的信息与搬运机器人200的动作参数的关系进行说明。图7是示出与稳定度相关的数据库的例子的表。图7所示的表T10是操作装置100的存储部140存储的稳定度数据库的一例。
表T10在左侧的列记载有被搬运物。被搬运物从上侧起示出为“收拾托盘”、“床上用品”。这表示搬运机器人200搬运收拾托盘或床上用品。
在被搬运物的右侧的列示出了被搬运物的状态。被搬运物的状态作为与“收拾托盘”对应的项目而从上侧起示出为“无吃剩”、“吃剩少于一半”及“吃剩一半以上”。另外,在其下侧作为与“床上用品”对应的项目而从上侧起示出为“9人份以下”及“10人份以上”。
在被搬运物的状态的右侧的列示出了与被搬运物的状态对应的稳定度。稳定度由“稳定”、“稍不稳定”及“不稳定”这3个项目分别表示。即,被搬运物的状态被分类成这3个状态。
在稳定度的右侧的列示出了与被搬运物的状态分别对应的动作模式。动作模式由“动作模式A”、“动作模式B”及“动作模式C”这3个项目分别表示。
在动作模式的右侧的列中,与各动作模式对应的升降驱动部251的加速模式由“加速模式D1”及“加速模式D2”表示。“加速模式D1”及“加速模式D2”以使升降部211升降时的升降加速度成为预先设定的值的方式分别确定。加速模式D2的最大加速度被设定为比加速模式D1的最大加速度小。即,在作为升降驱动部251的动作参数而选择了加速模式D2的情况下,升降部211成为比选择了加速模式D1的情况相对缓慢的动作。
同样,在升降驱动部的加速模式的右侧的列中,与各动作模式对应的移动驱动部252的加速模式由“加速模式F1”及“加速模式F2”表示。“加速模式F1”及“加速模式F2”以使涉及驱动轮213的旋转的搬运机器人200的移动加速度成为预先设定的值的方式分别确定。加速模式F2的最大加速度被设定为比加速模式F1的最大加速度小。即,在作为移动驱动部252的动作参数而选择了加速模式F2的情况下,驱动轮213成为比选择了加速模式F1的情况相对缓慢的动作。
根据上述的表T10所示的数据库,在搬运机器人200搬运收拾托盘的情况下,根据残留于收拾托盘的吃剩的量,稳定度被分类成3个等级。在“无吃剩”的情况下,被搬运物被分类成“稳定”,作为搬运机器人200的动作参数而选择动作模式A。在动作模式A下,升降驱动部是加速模式D1且移动驱动部252是加速模式F1。在“吃剩少于一半”的情况下,被搬运物被分类成“稍不稳定”,作为搬运机器人200的动作参数而选择动作模式B。在动作模式B下,升降驱动部是加速模式D1且移动驱动部252是加速模式F2。在“吃剩一半以上”的情况下,被搬运物被分类成“不稳定”,作为搬运机器人200的动作参数而选择动作模式C。在动作模式C下,升降驱动部是加速模式D2且移动驱动部252是加速模式F2。
同样,根据上述的表T10所示的数据库,在搬运机器人200搬运床上用品的情况下,根据收容的床上用品的量而稳定度被分类成2个等级。在“9人份以下”的情况下,被搬运物被分类成“稳定”,作为搬运机器人200的动作参数而选择动作模式A。在“10人份以上”的情况下,被搬运物被分类成“不稳定”,作为搬运机器人200的动作参数而选择动作模式C。
搬运系统10按照上述的表T10所示的项目,对用户U催促与稳定度相关的信息的输入。
接着,参照图8对搬运系统10进行的处理进行说明。图8是示出搬运系统的处理的流程图。图8所示的流程图示出了操作装置100的运算处理部110进行的处理。
首先,运算处理部110接受稳定度信息(步骤S11)。具体而言,运算处理部110使用于使用户U输入稳定度信息的画面显示于显示部121。并且,运算处理部110接受用户U输入的稳定度信息。
接着,运算处理部110设定与接受到的稳定度信息对应的动作参数(步骤S12)。在此,运算处理部110参照存储部140的稳定度数据库来决定与用户U输入的稳定度信息对应的动作参数。
接着,运算处理部110判定是否存在回收请求(步骤S13)。“回收请求”是要求使搬运机器人200搬运收容有被搬运物400的推车300的任务的执行的命令。回收请求通过用户U操作而发行。在未判定为产生了回收请求的情况下(步骤S13:否),运算处理部110反复进行步骤S13。需要说明的是,运算处理部110也可以设定计时器,在经过了预先设定的期间后,进行返回步骤S11的处理。
在判定为产生了回收请求的情况下(步骤S13:是),运算处理部110进入步骤S14。在步骤S14中,运算处理部110向搬运机器人200发出回收的指示(步骤S14)。
接着,参照图9~图11来说明接收稳定度信息时的显示部121的例子。图9是示出操作装置100的操作画面的例子的第一图。在显示部121中,从上侧起显示为“1:推车管理编号”、“2:被搬运物”、“2-1:状态”,在各显示的右边与“请选择”这一消息一起配置有以能够选择的方式设定的选择框。用户通过触摸选择框,能够使选择项目显示。
在“1:推车管理编号”中,用户U在推车管理编号的栏中选择收容有收拾托盘的推车300的管理编号。推车管理编号与配置推车300的场所建立了关联。由此,搬运机器人200通过被指定推车300的管理编号,能够确定前往回收的场所。在“2:被搬运物”中,用户U选择在表T10中示出的被搬运物即“收拾托盘”或“床上用品”。在“2-1:状态”中,用户U例如选择在表T10中示出的“被搬运物的状态”。
在显示部121的下段示出了显示为“回收请求”的按钮和显示为“取消”的按钮。用户U通过全部选择上述的选择项目,能够按下“回收请求”按钮。若按下“回收请求”按钮,则从操作装置100对搬运机器人200发送搬运推车300的指示。
图10是示出操作装置的操作画面的例子的第二图。图10所示的显示部121的例子示出了用户选择被搬运物的状态的状态。在图10中,在“2-1:状态”的选择栏121A显示有表示为“无吃剩”、“吃剩少于一半”及“吃剩一半以上”的项目。这些项目表示图7所示的表T10的“被搬运物的状态”。用户U通过目视确认收容的收拾托盘来识别吃剩的状态,从选择栏121A的项目选择一个项目。这样,通过使用户U选择与搬运时的稳定度相关联的信息,搬运系统10能够容易地决定搬运机器人200的动作参数。
参照图11,示出被搬运物的状态的选择项目的别的例子。图11是示出操作装置的操作画面的例子的第三图。图11所示的例子在使用户U选择被搬运物的状态是否稳定这一点上与图10的例子不同。图11所示的显示部121在“2-1:状态”的选择栏121B显示为“稳定”、“稍不稳定”及“不稳定”。这些项目表示图7所示的表T10的“稳定度”。用户U目视确认收容的收拾托盘,不管吃剩的状态而选择一个项目。这样,通过使用户U选择搬运时的稳定度,搬运系统10即使在难以进行定量的判断的情况下也能够决定搬运机器人200的动作参数。
以上,虽然对实施方式1进行了说明,但实施方式1的搬运系统10不限于上述的结构。例如,对于动作参数,只要涉及搬运机器人200的搬运动作的动作参数的至少1个有关即可。由此,动作参数也可以仅是升降驱动部251的加速度,还可以仅是移动驱动部252的加速度。
另外,动作参数不限于上述的项目。例如,动作参数也可以是搬运机器人200的移动路径。在该情况下,在存储部140及存储部260存储的楼层图中包括多个将被搬运物400搬运至目的地的路径的信息。在路径的信息中包括与地面的台阶、倾斜相关的信息。稳定度数据库以在稳定度不稳定的情况下能够选择地面的台阶、倾斜小的路径的方式将动作参数建立了关联。通过这样的结构,搬运系统10能够根据从用户U输入的稳定度信息而选择适宜的搬运路径。
动作参数也可以是对警告发出部253设定的扬声器215的音量。在该情况下,搬运比较不稳定的被搬运物时的警告的音量被设定为比搬运比较稳定的被搬运物时的警告的音量大。由此,在搬运比较不稳定的被搬运物的情况下,能够对比较大的范围内的周边的通行人等催促注意。因而,搬运系统10能够抑制通行人等意外地与搬运机器人200碰撞等事态,抑制被搬运物的散包等。
另外,动作参数除了上述以外,也可以是与测距传感器212检测的障碍物的安全距离的检测范围。即,搬运比较不稳定的被搬运物时的安全距离被设定为比搬运比较稳定的被搬运物时的安全距离远。由此,在搬运比较不稳定的被搬运物的情况下,能够相对于比较大的范围内的周边的障碍物确保安全距离。因而,搬运系统10能够抑制障碍物意外地与搬运机器人200碰撞等事态,抑制被搬运物的散包等。
另外,搬运系统具有的搬运机器人不限于上述的结构。例如,搬运机器人也可以不是利用升降部将推车抬起并搬运而是牵引推车的结构。另外,搬运机器人也可以具有收纳被搬运物的收纳室,将被搬运物直接收纳并搬运。在该情况下,具有收纳室的搬运机器人也可以是具有操作装置成为了一体的操作部的结构。在这样的结构的情况下,用户将被搬运物收纳于搬运机器人的收纳室,经由与搬运机器人成为了一体的操作部而输入与收纳的被搬运物的稳定度相关的信息。
以上,根据实施方式1,能够提供能够适宜地搬运被搬运物的搬运系统等。
<实施方式2>
接着,参照图12对实施方式2进行说明。实施方式2的搬运系统在操作装置100也与电梯500以能够通信的方式连接这一点上与实施方式1不同。图12是实施方式2的搬运系统的框图。图12所示的搬运系统20具有操作装置100、搬运机器人200及电梯500。电梯500设置于搬运机器人200自主移动的设施内。搬运机器人200利用电梯500来进行跨越了设施的楼层的移动。
实施方式2的操作装置100的通信部150除了搬运机器人200之外,也与电梯500以能够无线通信的方式连接。另外,存储部140存储的稳定度数据库存储有与电梯500的动作参数相关联的信息。运算处理部110的设定部113接收信息接受部112接受到的稳定度信息,并且参照存储部140存储的稳定度数据库,设定电梯500的动作参数。
电梯500具有电梯控制部510、传感器组520、轿厢升降驱动部521、门驱动部522、操作按钮523、存储部524及通信部530。电梯控制部510连接于电梯的各结构,控制电梯进行的各种动作。传感器组520包括电梯的门传感器及轿厢的位置传感器等。轿厢升降驱动部521具有驱动电梯500所具有的轿厢的升降动作的功能。门驱动部522在电梯500的轿厢停止于任意的楼层的状态下驱动门的开闭动作。操作按钮523包括设置于轿厢内的电梯的目的地按钮。存储部524包括非易失性存储器,存储动作参数。动作参数包括在电梯500从操作装置100接受了与动作参数相关的指示的情况下用于将与接受到的指示对应的动作向各结构指示的信息。
图13是示出实施方式2的稳定度数据库的例子的表。图13所示的表T20是操作装置100的存储部140存储的稳定度数据库的一例。在图13中的表T20中,示出了被搬运物是收拾托盘的情况作为一例。
在表T20所示的动作模式的右侧的列中,与各动作模式对应的电梯500的轿厢升降驱动部521的加速模式由“加速模式G1”及“加速模式G2”表示。加速模式G2与加速模式G1相比最大加速度被设定得小。即,在电梯500中,作为轿厢升降驱动部521的动作参数而选择了加速模式G2的情况下的电梯500的轿厢的升降动作成为比选择了加速模式G1的情况相对缓慢的动作。
根据上述的表T20所示的数据库,在搬运机器人200搬运收拾托盘的情况下,根据残留于收拾托盘的吃剩的量,稳定度被分类成3个等级。在“无吃剩”的情况下,被搬运物被分类成“稳定”,作为电梯500的动作参数而选择动作模式A。动作模式A下的轿厢升降驱动部521的加速度设定是加速模式G1。在“吃剩少于一半”的情况下,被搬运物被分类成“稍不稳定”,作为电梯500的动作参数而选择动作模式A。另一方面,在“吃剩一半以上”的情况下,被搬运物被分类成“不稳定”,作为电梯500的动作参数而选择动作模式B。动作模式B下的轿厢升降驱动部521的加速度设定是加速模式G2。
以上,虽然对实施方式2进行了说明,但实施方式2的搬运系统20不限于上述的结构。例如,搬运系统20的操作装置100也可以除了电梯500之外还一并设定搬运机器人200的动作参数。在该情况下,例如,图13所示的表T20除了轿厢升降驱动部521的加速模式之外还具有实施方式1所示的用于设定搬运机器人200的动作参数的信息。
如以上这样,根据实施方式2,作为搬运被搬运物的搬运装置,不限于搬运机器人200,能够设定搬运机器人200搭乘的电梯500的动作参数。由此,根据实施方式2,能够提供能够综合且适宜地搬运被搬运物的搬运系统等。
需要说明的是,上述的程序能够使用各种类型的非暂时性的计算机可读介质来保存并向计算机供给。非暂时性的计算机可读介质包括各种类型的具有实体的记录介质。非暂时性的计算机可读介质的例子包括磁记录介质(例如软盘、磁带、硬盘驱动器)、光磁记录介质(例如光磁盘)、CD-ROM(Read Only Memory:只读存储器)CD-R、CD-R/W、半导体存储器(例如,掩模ROM、PROM(Programmable ROM:可编程只读存储器)、EPROM(Erasable PROM:可擦除只读存储器)、快闪ROM、RAM(Random Access Memory:随机存取存储器))。另外,程序也可以由各种类型的暂时性的计算机可读介质向计算机供给。暂时性的计算机可读介质的例子包括电信号、光信号及电磁波。暂时性的计算机可读介质能够经由电线及光纤等有线通信路或无线通信路而将程序向计算机供给。
需要说明的是,本发明不限于上述实施方式,能够在不脱离主旨的范围内适当变更。例如,上述的实施方式对搬运机器人在医院内自主移动的系统进行了说明,但上述的系统能够在酒店、餐厅、办公楼、活动会场或复合设施中将预定的物品作为被搬运物而搬运。
根据这样描述的本公开,显而易见的是,可以以许多方式改变本公开的实施例。这样的变化不应被认为是背离本公开的精神和范围,并且对于本领域技术人员显而易见的所有这样的修改旨在包含于所附权利要求的范围内。
- 被处理体的搬运系统、无人搬运车系统、无人搬运车及被处理体的搬运方法
- 搬运系统、搬运方法及存储介质