一种基于液压马达的多向叉车液压系统
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及叉车液压系统技术领域,具体为一种基于液压马达的多向叉车液压系统。
背景技术
叉车是现代货物转运和装卸的重要设备,广泛用于仓储物流领域。现在仓库的布置和设计都本着节材节地的原则,要求能最大限度的堆放货物,提高单位面积土地的利用率,这就要求叉车需要在更为狭小的空间内完成装卸、堆垛、转运等作业。多向叉车一般具备直行、侧向行驶和原地回转的功能,故具有较好的灵活性,因而得到较为广泛的使用。
但是现有的多向叉车一般承载轮多采用油缸推动转向,一方面油缸占据了较大的安装空间,另一方面承载轮在受力不均时,也较易发生油缸活塞卡死的故障;此外,油缸运行速度较慢,转向等待时间较长,加之两侧油缸制造差异,转向同步性也不太容易控制。
发明内容
本发明的目的在于提供一种基于液压马达的多向叉车液压系统,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种基于液压马达的多向叉车液压系统,包括
驱动轮,其居中的设置在车身后部,所述驱动轮通过第一传动装置与驱动轮转向马达连接,所述驱动轮转向马达与第二两位六通电磁阀连通;
左承载轮,其设置在车身左支腿上,所述左承载轮通过第二传动装置与左承载轮转向马达连接,所述左承载轮转向马达与第一两位六通电磁阀连通;
右承载轮,其设置在车身右支腿上,所述右承载轮通过第三传动装置与右承载轮转向马达连接,所述右承载轮转向马达与三位四通电磁比例阀连通;
方向盘,其通过传递轴连接转向连接装置,所述转向连接装置连接液压转向器,所述液压转向器分别连通第一两位六通电磁阀和第二两位六通电磁阀;
泵站电机,其用于驱动齿轮泵运转,所述齿轮泵分别连通液压转向器、三位四通电磁阀组和三位四通电磁比例阀,所述三位四通电磁阀组分别与第一两位六通电磁阀和第二两位六通电磁阀连通;
控制器,其设置在车身上,且与电器元件电性连接;以及
驶模式切换开关,其设置在车身上,且与控制器电性连接,用于切换行驶模式。
优选的,所述行驶模式包括直行模式、侧行模式和原地回转模式。
优选的,在叉车处于所述直行模式时,各轮自动归正,呈前后朝向,所述左承载轮和右承载轮转向油路切断并锁定,通过液压转向器驱动轮转向马达联动驱动轮转向。
优选的,在叉车处于所述侧行模式时,各轮自动转到水平,呈左右朝向,驱动轮转向油路切断并锁定,通过液压转向器控制左承载轮转向马达转动,所述控制器收集对比两侧左承载轮和右承载轮角度值,并控制向右承载轮转向马达供油,使右承载轮转向方向和左承载轮的转向方向相反,转向角度相同。
优选的,在叉车处于所述原地回转模式时,各轮自动转到设定角度,切断油路并锁定方向盘。
优选的,所述驱动轮、左承载轮和右承载轮上分别设置有实时监控各轮转角的第一角度传感器、第二角度传感器和第三角度传感器。
优选的,所述左承载轮转向马达、驱动轮转向马达和右承载轮转向马达上均集成有制动器。
优选的,所述三位四通电磁阀组的中位机能为“O型”,且带有过压保护功能,所述三位四通电磁比例阀的中位机能为“Y型”。
与现有技术相比,本发明的有益效果是:
本发明通过将各个行驶轮连接液压马达,避免了直接使用油缸驱动,极大的降低安装空间;同时整车液压系统中电磁阀和电磁比例阀组合使用,使整车液压系统转向响应快,动作迅速和综合成本低;另外液压马达抗过载能力强,降低了整车的故障率,维护也较为方便;更为重要的是,通过液压马达驱动各个行驶轮,使得各个行驶轮具有独立的转向功能,实现了整车具有直行、侧行和原地回转等多种行驶模式,在面对复杂工况时,极大的提高了整车的便携性和灵活性。
附图说明
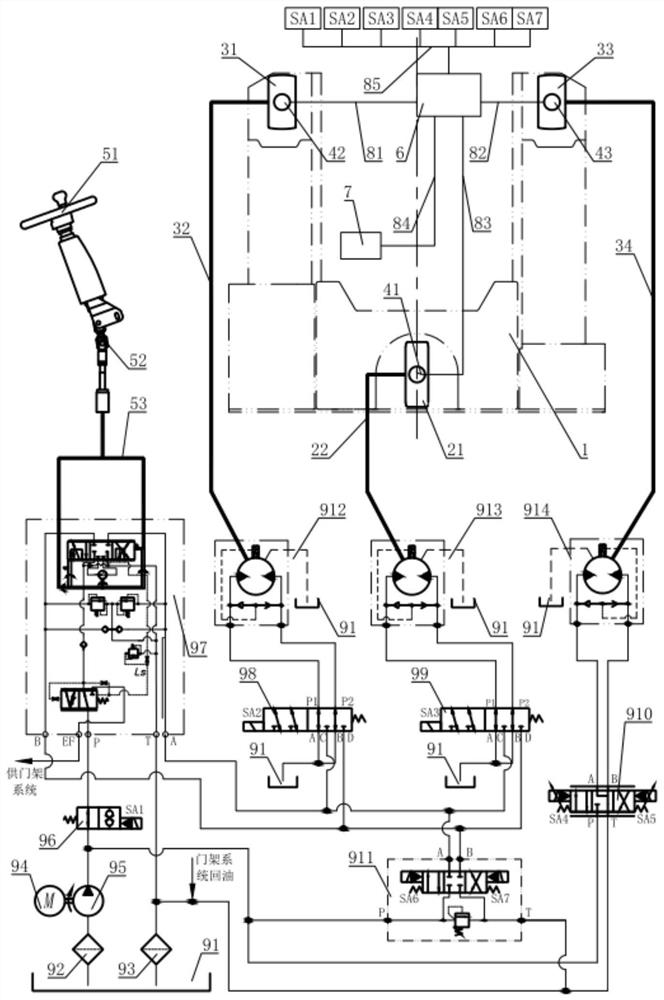
图1为本发明的液压系统示意图;
图2为本发明的叉车在直行模式下各行驶轮转动状态示意图;
图3为本发明的叉车在侧行模式下各行驶轮转动状态示意图;
图4为本发明的叉车在原地转向模式下各行驶轮转动状态示意图。
图中:1车身、21驱动轮、22第一传动装置、31左承载轮、32第二传动装置、33右承载轮、34第三传动装置、41第一角度传感器、42第二角度传感器、43第三角度传感器、51方向盘、52传递轴、53转向连接装置、6控制器、7行驶模式切换开关、81第一角度传感器信号线、82第二角度传感器信号线、83第三角度传感器信号线、84切换开关信号线、85电磁阀信号线、91液压油箱、92吸油过滤器、93高精度回油过滤器、94泵站电机、95齿轮泵、96两通电磁阀、97液压转向器、98第一两位六通电磁阀、99第二两位六通电磁阀、910三位四通电磁比例阀、911三位四通电磁阀组、912左承载轮转向马达、913驱动轮转向马达、914左承载轮转向马达。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-4,本发明提供一种技术方案:
一种基于液压马达的多向叉车液压系统,包括
车身1后部中间位置设置的驱动轮21,左支腿前端设置的左承载轮31,右支腿前端设置的右承载轮33,左承载轮31通过第二传动装置32与左承载轮转向马达912连接,驱动轮21通过第一传动装置22与驱动轮转向马达913连接,右承载轮33通过第三传动装置34与右承载轮转向马达914连接,驱动轮21、左承载轮31以及右承载轮33上分别安装第一角度传感器41、第二角度传感器42和第三角度传感器43,实时监控各轮的转角,以保证对整车行驶的准确控制;
车身1上设有行驶模式切换开关7,可用于切换多向叉车的行驶模式,所有的电子元件通过第一角度传感器信号线81、第二角度传感器信号线82、第三角度传感器信号线83、切换开关信号线84和电磁阀信号线85连接到控制器6,由其对叉车进行监控,方向盘51通过传递轴52,再经转向连接装置53连接液压转向器97,可由方向盘51控制液压转向器97操纵叉车转向;
该液压系统由泵站电机94驱动齿轮泵95经吸油过滤器92从液压油箱91吸油,齿轮泵95输出压力油液分三路:
一路经常开式两通电磁阀96通向液压转向器97的P口,该液压转向器97内置优先阀,油液优先通过A、B口向转向系统供油,多余的油液经EF口供给门架系统。液压转向器97的A口分别连接第一两位六通电磁阀98和第二两位六通电磁阀99的C口,液压转向器97的B口分别连接第一两位六通电磁阀98和第二两位六通电磁阀99的D口;
第二路通向三位四通电磁阀组911的P口,三位四通电磁阀组911的A口也分别连接第一两位六通电磁阀98和第二两位六通电磁阀99的C口,三位四通电磁阀组911的B口同样分别连接第一两位六通电磁阀98和第二两位六通电磁阀99的D口。三位四通电磁阀组911的中位机能为“O型”,且带有过压保护功能。
第一两位六通电磁阀98的A口和B口都与液压油箱91相连,P1口和P2口分别与左承载轮转向马达912的进出油口相连;第二两位六通电磁阀99的A口和B口也都与液压油箱91相连,P1口和P2口分别与驱动轮转向马达913的进出油口相连;常位时第一两位六通电磁阀98的A口与P1口连通,B口与P2口连通,同样第二两位六通电磁阀99的A口与P1口连通,B口与P2口连通;
第三路通向三位四通电磁比例阀910的P口,三位四通电磁比例阀910的A、B口分别与右承载轮转向马达914的进出油口相连,其中位机能为“Y”型;
三位四通电磁比例阀910、三位四通电磁阀组911和液压转向器97的T口与门架系统的回油汇聚后经高精度回油过滤器93过滤后流入液压油箱91;驱动轮转向马达913、左承载轮转向马达912以及右承载轮转向马达914的泄露油流回液压油箱91;
驱动轮转向马达913、左承载轮转向马达912以及右承载轮转向马达914集成有制动器,能保证在切断油液后,马达自锁在当前位置,确保驱动轮和左、右承载轮固定在需要的位置,从而保证行驶的稳定性;
按下直行模式开关,控制器6控制电磁铁SA1、SA2得电,通过控制SA6或SA7的通断切换三位四通电磁阀组911的阀芯位置,供油给左承载轮转向马达912使左承载轮31归正到零位;同时,通过控制SA4或SA5的通断切换三位四通电磁比例阀910的阀芯位置,供油给右承载轮转向马达914,使右承载轮33归正到零位;
这时SA2、SA4、SA5断电,SA3得电,通过控制SA6或SA7的通断切换三位四通电磁阀组911的阀芯位置,供油给驱动轮转向马达913使驱动轮21归正到零位。此时完成直行准备工作。
SA1、SA2、SA4、SA5、SA6、SA7断电,保持SA3得电,通过操作方向盘51带动液压转向器97,使油液经第二两位六通电磁阀99流入驱动轮转向马达913,来控制车身的行驶方向;
按下侧行模式开关,控制器6控制电磁铁SA1、SA3得电,通过控制SA6或SA7的通断切换三位四通电磁阀组911的阀芯位置,供油给驱动轮转向马达913使驱动轮21转到90度位;
这时SA3断电,SA2得电,通过控制SA6或SA7的通断切换三位四通电磁阀组911的阀芯位置,供油给左承载轮转向马达912使左承载轮31转到90度位。同时,通过控制SA4或SA5的通断切换三位四通电磁比例阀910的阀芯位置,供油给右承载轮转向马达914使右承载轮33转到90度位,此时完成侧行准备工作;
SA1、SA2、SA6、SA7断电,保持SA3得电,通过操作方向盘51带动液压转向器97,使油液经第一两位六通电磁阀98流入左承载轮转向马达912,来控制车身的行驶方向,同时监控左承载轮31和右承载轮33的角度,主控制6控制SA4或SA5的通断和大小切换三位四通电磁比例阀910的阀芯位置给右承载轮转向马达914供油,使右承载轮33随着左承载轮31转动,两者始终保持成轴对称的关系,并且两者不对称度越大,三位四通电磁比例阀910的开度越大,两者不对称度越小,三位四通电磁比例阀910的开度也越小;
按下原地回转模式开关,控制器6控制电磁铁SA1、SA2得电,通过控制SA6或SA7的通断切换三位四通电磁阀组911的阀芯位置,供油给左承载轮转向马达912使左承载轮31转到预设角度位,同时,通过控制SA4或SA5的通断切换三位四通电磁比例阀910的阀芯位置,供油给右承载轮转向马达914使右承载轮33到预设角度位。
这时SA2、SA4、SA5断电,SA3得电,通过控制SA6或SA7的通断切换三位四通电磁阀组911的阀芯位置,供油给驱动轮转向马达913使驱动轮21转到90度位。原地回转准备工作完成。
此时SA1、SA2、SA3、SA4、SA5、SA6、SA7都断电,启动叉车,便开始原地回转。
常开式两通电磁阀96可以控制供给液压转向器97的油液的通断,对向三位四通电磁阀组911的P口和三位四通电磁比例阀910的P口的供油则无影响。由于在直行、恻行和原地回转模式切换准备阶段SA1得电,阀芯关闭,断开了通往液压转向器97的油路,从而避免了在模式切换准备阶段误操作方向盘对系统的影响。
第一两位六通电磁阀98和第二两位六通电磁阀99常位时P1口通过A口与油箱91相连,P2口通过B口与油箱91相连。保证驱动轮转向马达913和左承载轮转向马达912在停止时处于卸荷状态,从而确保马达集成的制动器能有效制动。切换阀芯位置,C口通向P1,D口通向P2,此时压力油通向马达。在直行模式下,SA2断电,SA3得电,液压转向器97与驱动轮转向马达913接通,操作方向盘51控制驱动轮21进行转向;在侧型模式下,SA2得电,SA3断电,液压转向器97与左承载轮转向马达912接通,操作方向盘51控制左承载轮31进行转向,且两个动作相互独立,互不干扰。
三位四通电磁阀组911的A口,同时接入两位六通电磁阀I98和两位六通电磁阀II99的C口;三位四通电磁阀组911的B口,同时接入第一两位六通电磁阀98和第二两位六通电磁阀99的D口。使得模式切换的准备工作由控制器控制自动完成,不受人为干扰。三位四通电磁阀组911的中位机能为“O型”,且带有过压保护功能。确保在直行或侧行行驶过程中三位四通电磁阀组911的A、B口无油液输出,不干扰液压转向器97对转向系统的控制,同时过压保护功能,确保整个系统始终处于安全压力下工作。
右承载轮转向马达914通过三位四通电磁比例阀910控制,且该路油路不受其他油路影响,三位四通电磁比例阀910的中位机能为“Y型”。比例阀保证了右承载轮33随动响应迅速灵活,且不管角度差别大小响应时间一致,“Y型”中位机能,右承载轮转向马达914在停止时处于卸荷状态,从而确保其集成的制动器能有效制动。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种基于液压马达的多向叉车液压系统
- 一种基于液压系统的转运叉车用液压提升机构