一种基于AGV机器人的自动搬运系统及其多AGV协作方法
文献发布时间:2023-06-19 11:24:21
技术领域
本发明属于AGV机器人技术领域,涉及自动搬运技术,具体是一种基于AGV机器人的自动搬运系统及其多AGV协作方法。
背景技术
近年来,随着科学技术的发展,自动化技术呈现加速发展的趋势,国内自动化立体仓库和自动化柔性装配线进入发展与普及阶段。其中,在自动仓库与生产车间之间,各工位之间,各段输送线之间,AGV起了无可替代的重要作用。当前最常见的应用有AGV搬运机器人或AGV小车,主要功用集中在自动物流搬转运,AGV搬运机器人是通过特殊地标导航自动将物品运输至指定地点,最常见的引导方式为磁条引导,激光引导,磁钉导航、惯性导航。
基于AGV机器人的搬运系统繁忙时,不能将搬运需求进行合理化处理,也没有将负重载量与AGV机器人的实际情况相匹配,同时对于AGV机器人的引导路径不够优化,无法实现多AGV的协调工作,造成对AGV机器人的应用造成阻碍,为此,我们提出一种基于AGV机器人的自动搬运系统及其多AGV协作方法。
发明内容
针对现有技术存在的不足,本发明目的是提供一种基于AGV机器人的自动搬运系统及其多AGV协作方法。
本发明所要解决的技术问题为:
如何对AGV机器人的多个搬运需求进行协调处理,并依据AGV机器人的实际情况选取搬运机器人;
如何对AGV机器人的搬运路线进行规划,实现多AGV机器人的共同搬运协作。
本发明的目的可以通过以下技术方案实现:
一种基于AGV机器人的自动搬运系统,包括自动搬运系统、若干个AGV机器人以及设置在若干个AGV机器人内部的控制器;
所述控制器与自动搬运系统通信连接;
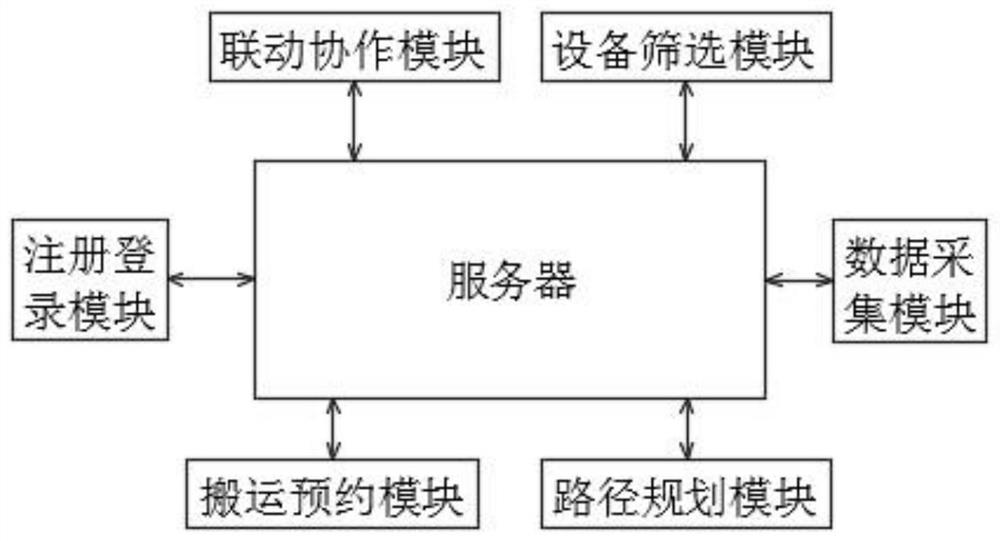
所述自动搬运系统包括注册登录模块、联动协作模块、数据采集模块、设备筛选模块、搬运预约模块、路径规划模块以及服务器;
所述搬运预约模块接收到搬运请求的发送时间后对搬运请求进行处理,处理步骤具体如下:
步骤P1:获取搬运请求的发送时间,利用系统当前时间减去发送时间计算得到搬运请求的生成时长T1i,i=1,2,……,v,i代表搬运请求;
步骤P2:获取搬运请求的计划搬运时长,并将计划搬运时长标记为T2i;
步骤P3:获取搬运请求的搬运重量BZi和搬运量BLi,利用公式Ki=BZi×b1+BLi×b2计算得出搬运请求的困难系数Ki;式中b1和b2均为比例系数固定数值,且b1和b2的取值均大于零;
步骤P4:将搬运请求的生成时长T1i、计划搬运时长T2i、困难系数Ki带入计算式计算得到搬运请求的预约值Yi,计算式具体如下:
步骤P5:预约值降序排列后依次作为搬运请求的排队序列号;
所述设备筛选模块接收到服务器发送的AGV机器人的工作状态和工作信息后,用于对AGV机器人进行智能筛选,智能筛选过程具体如下:
S1:获取处于在线状态和离线状态的AGV机器人,将处于在线状态和离线状态的AGV机器人归类为候选AGV机器人并将其标记为u,u=1,2,……,z,u代表候选AGV机器人;
S2:获取候选AGV机器人的使用年限,并将使用年限标记为Nu;获取候选AGV机器人的搬运总量,并将搬运总量标记为BZu;获取候选AGV机器人的搬运时长,并将搬运时长标记为BTu;
S3:利用公式
S4:获取候选AGV机器人的失误信息,将候选AGV机器人撞到物体次数记为Z1u,将候选AGV机器人撞到AGV机器人次数记为Z2u;利用公式Zu=Z1u×a4+Z2u×a5计算得出候选AGV机器人的撞击值Zu;式中,a4和a5均为修正因子,且a4和a5的取值均大于零;
S5:候选AGV机器人的搬运值Bu、撞击值Zu结合公式计算得到候选AGV机器人的候选值HXu,公式具体如下:
S6:候选AGV机器人的候选值HXu降序排列后选取最大值,最大值对应的AGV机器人为选定的设备;
所述搬运预约模块将排队序列号发送至用户终端,当达到相应的排队序列号时,设备筛选模块将选定的设备发送至用户终端。
进一步地,所述注册登录模块用于工作人员通过用户终端输入个人信息后注册登录自动搬运系统,并将个人信息发送至服务器内存储;所述个人信息包括姓名和手机号码;所述数据采集模块用于采集AGV机器人的工作状态和工作信息,并将AGV机器人的工作状态发送至服务器;
工作人员通过用户终端发送搬运请求,并将搬运请求发送至搬运预约模块,同时记录搬运请求的发送时间,搬运请求包括搬运种类、搬运重量和搬运量;
所述服务器将AGV机器人的工作状态和工作信息发送至设备筛选模块。
进一步地,工作状态包括忙碌状态、在线状态、离线状态和宕机状态;
工作信息包括AGV机器人的使用年限、搬运总量、搬运时长和失误信息;
失误信息包括撞到物体次数和撞到AGV机器人次数。
进一步地,所述数据采集模块用于采集AGV机器人的当前位置和目标位置,并将AGV机器人的当前位置和目标位置发送至路径规划模块。
进一步地,所述路径规划模块接收到数据采集模块发送的AGV机器人的当前位置和目标位置后,用于对AGV机器人的搬运路线进行判断规划,判断规划过程具体如下:
G1:获取AGV机器人的当前位置和当目标位置,依据当前位置和当目标位置得到AGV机器人达到目标位置的多条预设搬运路线o,o=1,2,……,m,o代表预设搬运路线;
G2:获取预设搬运路线的转弯数,并将转弯数标记为Zo;获取每个转弯对应的转弯度,相加取均值得到预设径路的平均转弯度PWo;
G3:获取预设搬运路线与预设搬运路线的交叉点,并将交叉点标记为JCo;获取预设搬运路线上AGV机器人的数量,并将预设搬运路线上AGV机器人数记为SLo;
G4:利用公式
G5:选取最小的行阻值,依据最小的行阻值得到对应的预设搬运路线;
G6:同时获取该预设搬运路线上AGV机器人的实时速度和行进方向,依据实时速度和行进方向判断出相互靠近的AGV机器人、静止不动的AGV机器人、相互远离的AGV机器人,分别以红点、黄点、绿点进行标记,将该预设搬运路线、红点、黄点、绿点均传输至AGV机器人的控制器。
进一步地,所述路径规划模块还将搬运路线上的红点、黄点、绿点传输至联动协作模块;所述联动协作模块接收到路径规划模块发送的搬运路线上的红点、黄点、绿点后,用于对多AGV机器人进行协调管理,协调管理步骤具体如下:
步骤一:自动搬运系统自设定安全间距,同时获取各搬运路线上AGV机器人的移动速度;
步骤二:当遭遇红点时,AGV机器人在达到自动搬运系统的自设定安全间距时作出避撞措施;
步骤三:当遭遇黄点时,AGV机器人在达到自动搬运系统的自设定安全间距时作出避撞措施;
步骤四:当遭遇绿点时,AGV机器人继续行驶。
一种基于AGV机器人的自动搬运系统的多AGV协作方法,包括以下步骤:
步骤一,将多个AGV机器人内的控制器与自动搬运系统进行通信连接,通过数据采集模块采集AGV机器人的工作状态和工作信息,并将AGV机器人的工作状态发送至服务器,注册登录后的工作人员通过用户终端发送搬运请求,并将搬运请求发送至搬运预约模块,搬运预约模块对搬运请求进行处理,获取搬运请求的生成时长、计划搬运时长和困难系数,结合计算式计算得到搬运请求的预约值,预约值降序排列后依次作为搬运请求的排队序列号;
步骤二,服务器将AGV机器人的工作状态和工作信息发送至设备筛选模块,设备筛选模块接收到服务器发送的AGV机器人的工作状态和工作信息后对AGV机器人进行智能筛选,获取候选AGV机器人的使用年限、搬运总量、搬运时长,利用公式计算得出候选AGV机器人的搬运值,而后通过候选AGV机器人撞到物体次数、撞到AGV机器人次数计算得出候选AGV机器人的撞击值,候选AGV机器人的搬运值、撞击值结合公式计算得到候选AGV机器人的候选值,候选AGV机器人的候选值降序排列后选取最大值,最大值对应的AGV机器人为选定的设备,搬运预约模块将排队序列号发送至用户终端,当达到相应的排队序列号时,设备筛选模块将选定的设备发送至用户终端;
步骤三,数据采集模块将采集AGV机器人的当前位置和目标位置,并将AGV机器人的当前位置和目标位置发送至路径规划模块,路径规划模块对AGV机器人的搬运路线进行判断规划,依据AGV机器人的当前位置和当目标位置得到AGV机器人达到目标位置的多条预设搬运路线,通过获取预设搬运路线的转弯数、平均转弯度、预设搬运路线与预设搬运路线的交叉点和预设搬运路线上AGV机器人数量,利用公式计算得到路线的行阻值,选取最小的行阻值,依据最小的行阻值得到对应的预设搬运路线,同时获取该预设搬运路线上AGV机器人的实时速度和行进方向,依据实时速度和行进方向判断出相互靠近的AGV机器人、静止不动的AGV机器人、相互远离的AGV机器人,分别以红点、黄点、绿点进行标记,将该预设搬运路线、红点、黄点、绿点均传输至AGV机器人的控制器;
步骤四,路径规划模块将搬运路线上的红点、黄点、绿点传输至联动协作模块,联动协作模块接收到路径规划模块发送的搬运路线上的红点、黄点、绿点后对多AGV机器人进行协调管理,自动搬运系统自设定安全间距,同时获取各搬运路线上AGV机器人的移动速度,当遭遇红点和黄点时,AGV机器人在达到自动搬运系统的自设定安全间距时作出避撞措施,当遭遇绿点时,AGV机器人继续行驶。
与现有技术相比,本发明的有益效果是:
1、本发明通过搬运预约模块对多个搬运请求进行协调处理,搬运请求的生成时长、计划搬运时长和困难系数,结合计算式计算得到搬运请求的预约值,预约值降序排列后依次作为搬运请求的排队序列号,方便协调处理多个AGV机器人的搬运需求;
2、本发明通过设备筛选模块对AGV机器人进行智能筛选,利用AGV机器人的使用年限、搬运总量、搬运时长计算得出候选AGV机器人的搬运值,再通过候选AGV机器人撞到物体次数、撞到AGV机器人次数计算得出候选AGV机器人的撞击值,候选AGV机器人的搬运值、撞击值结合公式计算得到候选AGV机器人的候选值,方便根据搬运的实际情况以及AGV机器人的实际情况筛选出符合搬运的AGV机器人;
3、本发明通过路径规划模块对AGV机器人的搬运路线进行判断规划,预设搬运路线的转弯数、平均转弯度、预设搬运路线与预设搬运路线的交叉点和预设搬运路线上AGV机器人数结合公式计算得到路线的行阻值,并对依据实时速度和行进方向,将相互靠近的AGV机器人、静止不动的AGV机器人、相互远离的AGV机器人分别以红点、黄点、绿点进行标记,将搬运路线上的红点、黄点、绿点传输至联动协作模块,联动协作模块对搬运路线上的红点、黄点、绿点后对多AGV机器人进行协调管理,在达到自动搬运系统的自设定安全间距时,AGV机器人作出避撞措施,方便多AGV机器人共同搬运协作时的路线规划。
附图说明
为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
图1为本发明的整体系统框图。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例一
请参阅图1所示,一种基于AGV机器人的自动搬运系统,包括自动搬运系统、若干个AGV机器人以及设置在若干个AGV机器人内部的控制器;
所述控制器与自动搬运系统通信连接;所述自动搬运系统包括注册登录模块、联动协作模块、数据采集模块、设备筛选模块、搬运预约模块、路径规划模块以及服务器;
所述注册登录模块用于工作人员通过用户终端输入个人信息后注册登录自动搬运系统,并将个人信息发送至服务器内存储;所述个人信息包括姓名和手机号码;所述数据采集模块用于采集AGV机器人的工作状态和工作信息,并将AGV机器人的工作状态发送至服务器,工作状态包括忙碌状态、在线状态、离线状态和宕机状态;所述工作信息包括AGV机器人的使用年限、搬运总量、搬运时长、失误信息等,失误信息包括撞到物体次数、撞到AGV机器人次数等;
工作人员通过用户终端发送搬运请求,并将搬运请求发送至搬运预约模块,同时记录搬运请求的发送时间,搬运请求包括搬运种类、搬运重量和搬运量;所述搬运预约模块接收到搬运请求的发送时间后对搬运请求进行处理,处理步骤具体如下:
步骤P1:获取搬运请求的发送时间,利用系统当前时间减去发送时间计算得到搬运请求的生成时长T1i,i=1,2,……,v,i代表搬运请求;
步骤P2:获取搬运请求的计划搬运时长,并将计划搬运时长标记为T2i;
步骤P3:获取搬运请求的搬运重量BZi和搬运量BLi,利用公式Ki=BZi×b1+BLi×b2计算得出搬运请求的困难系数Ki;式中b1和b2均为比例系数固定数值,且b1和b2的取值均大于零;
步骤P4:将搬运请求的生成时长T1i、计划搬运时长T2i、困难系数Ki带入计算式计算得到搬运请求的预约值Yi,计算式具体如下:
步骤P5:预约值降序排列后依次作为搬运请求的排队序列号;
所述服务器将AGV机器人的工作状态和工作信息发送至设备筛选模块;所述设备筛选模块接收到服务器发送的AGV机器人的工作状态和工作信息后,用于对AGV机器人进行智能筛选,智能筛选过程具体如下:
S1:获取处于在线状态和离线状态的AGV机器人,将处于在线状态和离线状态的AGV机器人归类为候选AGV机器人并将其标记为u,u=1,2,……,z,u代表候选AGV机器人;
S2:获取候选AGV机器人的使用年限,并将使用年限标记为Nu;获取候选AGV机器人的搬运总量,并将搬运总量标记为BZu;获取候选AGV机器人的搬运时长,并将搬运时长标记为BTu;
S3:利用公式
S4:获取候选AGV机器人的失误信息,将候选AGV机器人撞到物体次数记为Z1u,将候选AGV机器人撞到AGV机器人次数记为Z2u;利用公式Zu=Z1u×a4+Z2u×a5计算得出候选AGV机器人的撞击值Zu;式中,a4和a5均为修正因子,且a4和a5的取值均大于零;
S5:候选AGV机器人的搬运值Bu、撞击值Zu结合公式计算得到候选AGV机器人的候选值HXu,公式具体如下:
S6:候选AGV机器人的候选值HXu降序排列后选取最大值,最大值对应的AGV机器人为选定的设备;
所述搬运预约模块将排队序列号发送至用户终端,当达到相应的排队序列号时,设备筛选模块将选定的设备发送至用户终端;
所述数据采集模块用于采集AGV机器人的当前位置和目标位置,并将AGV机器人的当前位置和目标位置发送至路径规划模块;所述路径规划模块接收到数据采集模块发送的AGV机器人的当前位置和目标位置后,用于对AGV机器人的搬运路线进行判断规划,判断规划过程具体如下:
G1:获取AGV机器人的当前位置和当目标位置,依据当前位置和当目标位置得到AGV机器人达到目标位置的多条预设搬运路线o,o=1,2,……,m,o代表预设搬运路线;
G2:获取预设搬运路线的转弯数,并将转弯数标记为Zo;获取每个转弯对应的转弯度,相加取均值得到预设径路的平均转弯度PWo;
G3:获取预设搬运路线与预设搬运路线的交叉点,并将交叉点标记为JCo;获取预设搬运路线上AGV机器人的数量,并将预设搬运路线上AGV机器人数记为SLo;
G4:利用公式
G5:选取最小的行阻值,依据最小的行阻值得到对应的预设搬运路线;
G6:同时获取该预设搬运路线上AGV机器人的实时速度和行进方向,依据实时速度和行进方向判断出相互靠近的AGV机器人、静止不动的AGV机器人、相互远离的AGV机器人,分别以红点、黄点、绿点进行标记,将该预设搬运路线、红点、黄点、绿点均传输至AGV机器人的控制器;
所述路径规划模块还将搬运路线上的红点、黄点、绿点传输至联动协作模块;所述联动协作模块接收到路径规划模块发送的搬运路线上的红点、黄点、绿点后,用于对多AGV机器人进行协调管理,协调管理步骤具体如下:
步骤一:自动搬运系统自设定安全间距,同时获取各搬运路线上AGV机器人的移动速度;
步骤二:当遭遇红点时,AGV机器人在达到自动搬运系统的自设定安全间距时作出避撞措施;
步骤三:当遭遇黄点时,AGV机器人在达到自动搬运系统的自设定安全间距时作出避撞措施;
步骤四:当遭遇绿点时,AGV机器人继续行驶;
其中,避撞措施包括但不局限于AGV机器人立即停止移动、AGV机器人调转方向等。
实施例二
一种基于AGV机器人的自动搬运系统的多AGV协作方法,包括以下工作步骤:
步骤一,将多个AGV机器人内的控制器与自动搬运系统进行通信连接,通过数据采集模块采集AGV机器人的工作状态和工作信息,并将AGV机器人的工作状态发送至服务器,注册登录后的工作人员通过用户终端发送搬运请求,并将搬运请求发送至搬运预约模块,搬运预约模块对搬运请求进行处理,获取搬运请求的生成时长、计划搬运时长和困难系数,结合计算式计算得到搬运请求的预约值,预约值降序排列后依次作为搬运请求的排队序列号;
步骤二,服务器将AGV机器人的工作状态和工作信息发送至设备筛选模块,设备筛选模块接收到服务器发送的AGV机器人的工作状态和工作信息后对AGV机器人进行智能筛选,获取候选AGV机器人的使用年限、搬运总量、搬运时长,利用公式计算得出候选AGV机器人的搬运值,而后通过候选AGV机器人撞到物体次数、撞到AGV机器人次数计算得出候选AGV机器人的撞击值,候选AGV机器人的搬运值、撞击值结合公式计算得到候选AGV机器人的候选值,候选AGV机器人的候选值降序排列后选取最大值,最大值对应的AGV机器人为选定的设备,搬运预约模块将排队序列号发送至用户终端,当达到相应的排队序列号时,设备筛选模块将选定的设备发送至用户终端;
步骤三,数据采集模块将采集AGV机器人的当前位置和目标位置,并将AGV机器人的当前位置和目标位置发送至路径规划模块,路径规划模块对AGV机器人的搬运路线进行判断规划,依据AGV机器人的当前位置和当目标位置得到AGV机器人达到目标位置的多条预设搬运路线,通过获取预设搬运路线的转弯数、平均转弯度、预设搬运路线与预设搬运路线的交叉点和预设搬运路线上AGV机器人数量,利用公式计算得到路线的行阻值,选取最小的行阻值,依据最小的行阻值得到对应的预设搬运路线,同时获取该预设搬运路线上AGV机器人的实时速度和行进方向,依据实时速度和行进方向判断出相互靠近的AGV机器人、静止不动的AGV机器人、相互远离的AGV机器人,分别以红点、黄点、绿点进行标记,将该预设搬运路线、红点、黄点、绿点均传输至AGV机器人的控制器;
步骤四,路径规划模块将搬运路线上的红点、黄点、绿点传输至联动协作模块,联动协作模块接收到路径规划模块发送的搬运路线上的红点、黄点、绿点后对多AGV机器人进行协调管理,自动搬运系统自设定安全间距,同时获取各搬运路线上AGV机器人的移动速度,当遭遇红点和黄点时,AGV机器人在达到自动搬运系统的自设定安全间距时作出避撞措施,当遭遇绿点时,AGV机器人继续行驶。
上述公式均是去量纲取其数值计算,公式是由采集大量数据进行软件模拟得到最近真实情况的一个公式,公式中的预设参数由本领域的技术人员根据实际情况进行设置。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种基于AGV机器人的自动搬运系统及其多AGV协作方法
- 一种基于AGV的自动搬运系统及多AGV协作方法