一种用于无人机保障的自动升降装置
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及一种用于无人机保障的自动升降装置,用于无人机保障时的顶起与放下工作。
背景技术
无人机在生产阶段以及外场任务执行期间的维护阶段,都需要将无人机顶起进行维护操作,无人机顶起需要专门的设备来进行。
目前广泛使用的顶起装置都是基于丝杠的手动升降装置,通过同时由两人手动转动两个顶起装置的圆形摇柄,控制无人机的顶起与放下流程。需要耗费较多的人力物力,并且手动操作效率较低,若需要快速部署,将会影响无人机正常执行任务。而且由于不同型号无人机外形不同,每种型号的无人机都需要特定的顶起装置,不具备通用性。地面维护与测试阶段通常需要测量和控制无人机的水平度,无人机水平度一般由水平仪测量。无人机称重也是无人机飞行必备工作,一般由地秤来完成,每次称重时需要多人协同将无人机的三个轮胎都推到地秤水平面板上。
无人机的顶起工作直接影响无人机的外场综合保障维护时间以及无人机任务执行效率。很多时候为了保证飞机的出勤率,需要在外场、简易机场或跑道上对无人机进行快速地面维护与测试。因此,设计一款自动升降装置,保障无人机外场维护工作显得十分必要。
发明内容
本发明要解决的技术问题是:克服现有技术的不足,提供了一种用于无人机保障的自动升降装置,可用于无人机保障时的顶起工作。该装置具有以下特点:1)采用电动机实现自动升降;2)采用电动模式与手动模式双余度设计,保证系统可靠性;3)增加水平仪与重力传感器,使该装置能够测量无人机水平度与重量,具备多功能保障能力;4)设置缓冲器,保障无人机在凹凸路面的通过能力;5)增加一键式抓地自锁装置,保障无人机顶起状态下装置的抓地能力;
6)模块化设计,使该装置具备通用性。
本发明目的通过以下技术方案予以实现:
一种用于无人机保障的自动升降装置,包括:托盘组件、升降组件、缓冲底盘组件、机轮组件、一键抓地自锁组件;
托盘组件包括U型托架,以及安装在U型托架上的水平仪;
升降组件包括上端臂杆、旋转轴、下端臂杆、下端臂杆转动轴、丝杠;旋转轴安装在丝杠上,且随着丝杠的转动而移动;上端臂杆的一端用于支撑托盘组件,另一端连接旋转轴和丝杠;下端臂杆的一端用于与缓冲底盘组件连接,另一端连接旋转轴和丝杠;随着旋转轴的移动,上端臂杆支撑托盘组件升高或降低,下端臂杆支撑丝杠升高或降低;
缓冲底盘组件包括弹簧减震器、地盘支架、重量传感器;弹簧减震器的一端与地盘支架连接,另一端与升降组件连接,重量传感器安装在地盘支架上;
机轮组件包括自锁卡扣、转动轮;转动轮安装在缓冲底盘组件上,自锁卡扣用于锁定或解锁转动轮;
一键抓地自锁组件包括锥形橡胶头、自锁踏板、踏板旋转销钉;自锁踏板绕踏板旋转销钉转动,带动锥形橡胶头向上或向下,实现一键抓地自锁组件的锁定与解锁。
上述的自动升降装置,托盘组件还包括安装在U型托架上的橡胶垫。
上述的自动升降装置,升降组件还包括升降电机,用于驱动丝杠。
上述的自动升降装置,升降组件还包括手动旋转装置,用于驱动丝杠。
上述的自动升降装置,上端臂杆与托盘组件可拆卸且可转动的连接。
上述的自动升降装置,下端臂杆的与缓冲底盘组件可转动的连接。
上述的自动升降装置,升降组件还包括升降开关,用于控制升降电机。
上述的自动升降装置,上端臂杆为倒V字型,下端臂杆为V字型。
利用上述自动升降装置的顶起方法,包括如下步骤:
通过升降电机或手动旋转装置带动丝杠转动,丝杠与旋转轴的丝杠螺纹传动实现旋转轴移动,然后带动上端臂杆绕旋转轴转动,使U型托架向上运动,直至顶起到预定位置。
利用上述自动升降装置的下降方法,包括如下步骤:
通过升降电机或手动旋转装置带动丝杠转动,丝杠与旋转轴的丝杠螺纹传动实现旋转轴移动,然后带动上端臂杆绕旋转轴转动,使U型托架向下运动,直至升降装置脱离无人机;松开一键抓地自锁组件的自锁踏板与机轮组件的自锁卡扣,将升降装置从机身下方安全移出,无人机放下工作完成。
本发明相比于现有技术具有如下有益效果:
1)本发明的用于无人机保障的自动升降装置采用电动机实现自动升降,操作快捷,效率高,节省人力物力。
2)本发明的用于无人机保障的自动升降装置采用电动升降模式与手动升降模式双余度设计,系统更加可靠。
3)本发明的用于无人机保障的自动升降装置通过增加水平仪和重力传感器,可以实时测试无人机的水平度与重量,使该系统具备多功能保障能力。
4)本发明的用于无人机保障的自动升降装置通过底部的缓冲底盘组件,使得该装置无人机撑起的状态下,具备在不平整路面的通过能力。
5)本发明的用于无人机保障的自动升降装置采用了一键式抓地自锁装置,与自锁机轮配合,实现无人机撑起状态下良好的抓地能力。
6)本发明的用于无人机保障的自动升降装置,托盘组件与升降组件通过螺栓连接,可根据不同型号的无人机更换不同的托盘,模块化设计,通用性强,节省成本。
附图说明
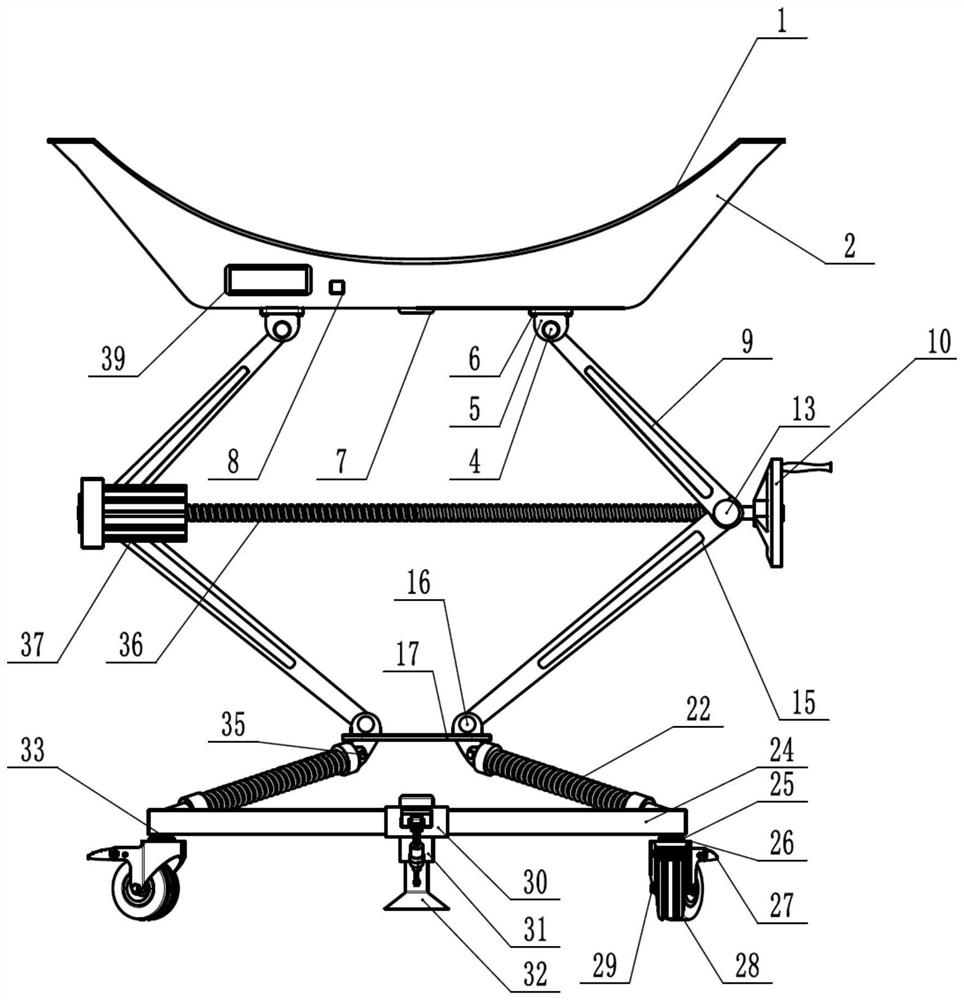
图1为用于无人机保障的自动升降装置正视图;
图2为用于无人机保障的自动升降装置侧视图;
图3为用于无人机保障的自动升降装置轴测图;
图4为用于无人机保障的自动升降装置演示图。
图5为用于无人机保障的自动升降装置工作状态图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步详细描述。
一种无人机保障的自动升降装置,如图1~3所示,包括托盘组件、升降组件、缓冲底盘组件、机轮组件、一键抓地自锁组件。托盘组件包括橡胶垫1、U型托架2、水平仪7、升降开关8、LED显示39;升降组件包括快卸销钉4、上端臂杆连接耳片5、连接螺栓6、上端臂杆9、旋转手柄10、旋转轴13、下端臂杆15、下端臂杆转动轴16、转接板17、丝杠36、升降电机37、端盖固定螺栓40、丝杠固定轴承41;缓冲底盘组件包括弹簧减震器22、缓冲器连接螺栓35、地盘支架24、重量传感器33;机轮组件包括机轮固定螺母25、机轮端盖26、自锁卡扣27、转动轮28、轮轴29;一键抓地自锁组件包括转接端盖30、活塞杆31、锥形橡胶头32、自锁踏板43、活动键槽44、复位弹簧45、锁止装置46、传动轴47、传动轴连接耳片48、传动轴固定销钉49、踏板旋转销钉52。
托盘组件与升降组件通过连接螺栓6实现紧固;升降组件与缓冲底盘组件通过缓冲器连接螺栓35紧固连接;缓冲底盘组件与机轮组件通过机轮固定螺母25紧固连接;缓冲底盘组件的地盘支架24与一键抓地自锁组件的转接端盖25通过焊接的方式固接。
托盘组件中橡胶垫1、水平仪7、升降开关8、LED显示39与U型托架2紧固安装。
升降组件中上端臂连接耳片5与上端臂杆9通过快卸销钉4铰接,上端臂连接耳片5与上端臂杆9均可绕快卸销钉4转动;上端臂杆9与下端臂杆15通过旋转轴13铰接,上端臂杆9与下端臂杆15均可绕旋转轴13转动;下端臂杆15与下端臂杆连接耳片17通过下端臂杆转动轴16铰接,下端臂杆15与下端臂杆连接耳片17均可绕下端臂杆转动轴16转动。
升降组件中丝杠36与靠近电机一侧的旋转轴13通过丝杠固定轴承41形成转动副;丝杠36与靠近手轮一侧的旋转轴13形成丝杠副。当电机转动或旋转手轮时,带动丝杠36旋转,丝杠的旋转通过丝杠副转化为靠近手轮一侧的旋转轴13的沿丝杠轴向的平动,从而改变连杆长度,驱动托盘的上下运动。
升降组件中下端臂杆15与下端臂杆连接耳片17通过下端臂杆转动轴16连接,下端臂杆15可绕下端臂杆转动轴16转动。
缓冲底盘组件中弹簧减震器22一端通过缓冲器连接螺栓35与升降组件紧固连接,另一端与地盘支架24焊接,重量传感器33固定安装在地盘支架24上。当升降装置行驶在凹凸不平的路面时,首先会迫使弹簧减震器22伸缩从而进行缓冲,减小振动或冲击对无人机的影响。
机轮组件中转动轮28通过轮轴29与机轮端盖26铰接,转动轮28能够绕轮轴29转动。机轮端盖26与机轮固定螺母25固定连接。自锁卡扣27安装在机轮端盖26上。当自锁卡扣27处于释放位置时,自锁卡扣27与转动轮28无接触,转动轮28可自由转动;将自锁卡扣27踩下后,其与转动轮28接触,并产生摩擦力,阻碍转动轮28转动,从而实现装置锁定的功能。
一键抓地自锁组件中,转接端盖30与缓冲底盘组件的地盘支架24焊接。转接端盖30与活塞杆31为轴孔配合,活塞杆31能够沿转接端盖30轴向滑动,锥形橡胶头32与活塞杆31固定连接。自锁踏板43与转接端盖30通过踏板旋转销钉52铰接,自锁踏板43可绕踏板旋转销钉52转动,活动键槽44与自锁踏板43固定连接,复位弹簧45、锁止装置46与传动轴47三者固连,复位弹簧45上端头可在活动键槽44中左右移动。传动轴连接耳片48与锥形橡胶头32固定连接,与传动轴47通过传动轴固定销钉49与传动轴连接耳片48固定连接。将自锁踏板43踩下后,复位弹簧45端头沿活动键槽44向内侧滑动,通过复位弹簧45、锁止装置46与传动轴47带动锥形橡胶头32向下运动,实现抓地功能。
其中由升降电机37、丝杠36、上端臂杆9、下端臂杆15、丝杠固定轴承41、旋转轴13、U型托架2、快卸销钉4、上端臂杆连接耳片5、连接螺栓6组成的升降系统,通过升降电机37、丝杠36、丝杠固定轴承41组成的作动体,实现旋转轴13沿丝杠36的左右移动,从而实现上端臂杆9与下端臂杆15绕旋转轴13的转动,带动U型托架的上下移动。
其中由旋转手柄10、旋转轴13、丝杠36、上端臂杆9、下端臂杆15、丝杠固定轴承41、U型托架2、托架安装板3、快卸销钉4、上端臂杆连接耳片5、连接螺栓6组成的升降系统,通过旋转手柄10、丝杠36组成的作动体,实现旋转轴13沿丝杠36的左右移动,从而实现上端臂杆9、下端臂杆15绕旋转轴13的转动,进而带动U型托架的上下移动。
其中托盘组件与升降组件通过连接螺栓6紧固连接。
其中由缓冲底盘组成的缓冲系统,当受到由于地面不平引起的颠簸,利用缓冲系统的减震功能,减小对无人机的冲击。
其中由一键抓地自锁组件组成的一键抓地系统,通过自锁踏板43绕踏板旋转销钉52转动,带动实现系统一键抓地。
其中水平仪与重力传感器,可以实时显示无人机的水平度与重量。
结合图4-5对无人机的升降工作进行说明。工作时,将两个用于无人机保障的自动升降装置推到无人机机身下方正确的位置。移动到位后,踩下一键抓地自锁组件的自锁踏板43与机轮组件的自锁卡扣27,锁死一键式抓地装置与万向轮。
(1)电动升降模式:
顶起时,通过升降开关8控制升降电机37转动,带动丝杠36转动,通过丝杠36与旋转轴13的丝杠螺纹传动实现旋转轴13沿丝杠36向升降电机37端移动,带动上端臂杆9绕旋转轴13转动,使U型托架2向上运动,缓慢顶起无人机,至无人机轮胎离地10厘米左右,升降电机37停止转动,无人机顶起工作完成。
放下时,通过升降开关8控制升降电机37向另一方向转动,带动丝杠36转动,通过丝杠36与旋转轴13的丝杠螺纹传动实现旋转轴13沿丝杠36向旋转手柄10端移动,带动上端臂杆9绕旋转轴13转动,使U型托架2向下运动,缓慢放下无人机,直至无人机轮胎接触地面。继续降低升降装置,直至升降装置脱离无人机,松开一键抓地自锁组件的自锁踏板43与机轮组件的自锁卡扣27,将升降装置从机身下方安全移出,无人机放下工作完成。
(2)手动升降模式:
顶起时,通过转动旋转手柄10,带动丝杠36转动,通过丝杠36与旋转轴13的丝杠螺纹传动实现旋转轴13沿丝杠36向升降电机37端移动,带动上端臂杆9绕旋转轴13转动,使U型托架2向上运动,缓慢顶起无人机,至无人机轮胎离地10厘米左右,升降电机37停止转动,无人机顶起工作完成。
放下时,通过旋转手柄10使旋转盘12向另一个方向转动,带动丝杠36转动,通过丝杠36与旋转轴13的丝杠螺纹传动实现旋转轴13沿丝杠36向旋转手柄10端移动,带动上端臂杆9绕旋转轴13转动,使U型托架2向下运动,缓慢放下无人机,直至轮胎接触地面。继续降低升降装置,直至升降装置脱离无人机,松开一键抓地自锁组件的自锁踏板43与机轮组件的自锁卡扣27,将升降装置从机身下方安全移出,无人机放下工作完成。
通过水平仪7指示调整无人机水平度,保障其他维护工作,通过重量传感器33实时测量的无人机重量。在无人机顶起状态,如果需要移动无人机,松开一键抓地自锁组件的自锁踏板43与机轮组件的自锁卡扣27,推动无人机,由于系统采用缓冲底盘,具备在外场经过不平整路面时的通过能力。
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
- 一种用于无人机保障的自动升降装置
- 一种用于无人机自动换电的升降装置