批量采集和运输月壤系统
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及一种批量采集和运输月壤系统,尤其是能够批量采集和运输月壤的批量采集和运输月壤系统。
背景技术
在月球上建立基地提取氦3再运回来,这个方法估计十年内无法实现,因为月球上的环境太差了,既无空气,又缺水,阳光垂直照射的地方温度127℃,夜晚温度降到-183℃。
当前可行的办法是将月壤运回来再提取氦3。
去一次月球取回来月壤几公斤或几十公斤甚至几百公斤,只够科研。去一次月球不容易,起码要两亿美元。
要满足工业化生产,一次需运回来数吨甚至数十吨。
去一次月球,如何批量采集和运输月壤成了当务之急。
发明内容
本发明要解决的技术问题是提供一种能够批量采集和运输月壤的批量采集和运输月壤系统。
为解决上述技术问题,本发明的技术方案是这样的:
一种批量采集和运输月壤系统,含运载火箭、返回器、月球车和采壤装置。
该月球车含底板、行走装置、智能控制系统、导航制导控制系统、激光测距测速敏感器、激光三维成像敏感器、姿控发动机、变推力发动机、相机、电机、传感器、定向天线、通信设备、太阳翼和推进剂。
该底板为水平矩形板。
该导航制导控制系统,能根据激光测距测速敏感器和激光三维成像敏感器测得的数据,进行综合判断,操纵姿控发动机和变推力发动机,使该月球车平稳降落在月球的平坦地面上。
该智能控制系统,能根据定向天线和通信设备接收的指令或传感器感知的情况,操纵相应电机完成相应动作;该定向天线和该通信设备还能向地球发送探测信息。
太阳翼展开时将太阳能转化为电能向需要用电的电机供电;
该月球车携带的推进剂,既供该月球车在落月之前和落月过程中,姿控发动机和变推力发动机工作时的消耗,又供该月球车驼着该返回器离月升空过程中的消耗。
四个行走装置分别竖直安装于该底板四个转角处附近的该底板上。
这四个行走装置中的每个行走装置,均由轮柱、轮轴、行走轮、套筒和弹簧组成。
该套筒,其下端敞开,其上端封闭,其竖直活动安装在该底板上,其相对该底板可上下调节,但不能沿其他方向移动,也不能从该底板上脱离。
该轮柱由上圆柱体和下圆柱体连接为整体;该上圆柱体,其位于该套筒的内腔中,其外径等于或小于该套筒的内径,其轴向长度小于该套筒内腔的高度,其在该套筒的内腔中可上下自由滑动,也可以绕轴线自由转动,但不能从该套筒的内腔中脱离;该下圆柱体,其从该套筒的下端向下伸出,其下端为两个垂耳,这两个垂耳之间为空腔。
该轮轴,其水平穿过该轮柱两垂耳之间的空腔,其两端分别与这两垂耳固定连接。
该行走轮,其位于该轮柱两垂耳之间的空腔中,其套装在该轮轴上,其可绕轴线自由转动,但不能沿轴向移动。
该弹簧,其处于压缩状态,其位于该套筒的内腔中,其下端与该轮柱的上端面活动接触,其上端与该套筒内腔的顶腔面活动接触。
该月球车降落月球地面时,该弹簧起缓冲吸能作用,从而实现该月球车的软着陆。
该返回器含顶盖、桶体、降落伞、侧孔、盖托、侧盖、导板和主发动机。
该降落伞,其安装在该顶盖中,其在该返回器返回地球时自动打开,使该返回器减速下降并安全着陆。
该桶体为盛装月壤的容器。
该侧孔为圆孔,采集的月壤经其进到该桶体的内腔中,其位于该顶盖的前方,其在该桶体未装月壤时是敞开的。
该导板为弧形直板,其一端与该侧孔下方的该桶体的内表面固定连接,其另一端倾斜向下伸在该桶体内腔的中央,其使落到该桶体内腔中的月壤能在该内腔中均匀分布。
该盖托和该侧盖组合为整体;该侧盖为外凸内凹圆板,其外径等于该侧孔的内径;该盖托亦为外凸内凹圆板,但其外径大于该侧盖的外径,其用铰链连接在该桶体的外表面上,该铰链位于该顶盖的前方但接近该顶盖;当该桶体内腔收集的月壤达额定量后,该月球车上智能控制系统指示相应电机工作,使该侧盖向下翻转进到该侧孔中,将该侧孔严密封堵,同时该盖托的环形内表面与该侧孔周围的该桶体的外表面通过磁力吸附,将该侧孔严密封盖。
三台主发动机竖直捆绑在该桶体的外圆周表面上,这三台主发动机中相邻两主发动机对应的中心角为120°,这三台主发动机工作时提供的竖直向上的总推力,大于该返回器、该月球车和该返回器内腔中盛装的月壤在月球上的总重力。
该采壤装置,其安装在该月球车的前底板上,其随同该月球车和该返回器降落在月球地面上,其专司月壤的采集,其含转轴、转柱、叉板、铲斗、龙骨、铰接轴、端板、托板、前撑板和后撑板。
该端板,其为条形竖直板,其下端位于其上端的前下方;两端板彼此对置且分居该采壤装置的两侧。
该转轴,其为横向水平圆杆,其长度等于或大于这两端板两外侧面之间的距离;两转轴,其两端分别穿过这两端板且与这两端板固定连接,其中一个转轴的两端分别接近这两端板的上端,且分别位于这两端板的中线上,另一个转轴的两端分别接近这两端板的下端,且分别位于这两端板的中线上。
该转柱,其为横向水平圆柱体,其轴向长度等于或小于这两端板上两内侧向面之间的距离,其外径大于转轴的外径;两转柱,其分别同轴套装在这两转轴上,其分别可绕各自轴线自由转动,但不能沿各自轴向移动。
该叉板,其为矩形板,其横向宽度等于转柱的轴向长度;每个转柱圆周表面的周围沿径向均匀安装多块叉板,这多块叉板的里端均与相应位置的该转柱的圆周表面固定连接,这多块叉板的外端分别沿该转柱的径向向外伸出。
该龙骨,其为纵向凸字形板,其中、后部的横向宽度等于或小于转柱的轴向长度,其前部的横向中央沿纵向向前伸出的伸出部分为矩形,其后部横向中央的缺口亦为矩形,但该伸出部分的纵向长度小于该缺口的纵向长度,该伸出部分的横向宽度小于该缺口的横向宽度; n块龙骨依次连接成环形,相邻的前后两块龙骨中,后一块龙骨的伸出部分插入前一块龙骨的缺口中,并用铰接轴将这前后两块龙骨铰接为一体;相邻两铰接轴之间的距离等于转柱上相邻两叉板外端之间的距离;连接成环形的这n块龙骨套装在两转柱的相应叉板上,当这两转柱中的任意一个转柱在电机的驱动下绕轴线沿逆时针方向旋转时,通过相应叉板的带动,这n块龙骨沿环形线路也沿逆时针方向旋转,且带动另一个转柱和这另一个转柱上的叉板也沿逆时针方向旋转;这n块龙骨在旋转过程中,因受这两端板的阻挡,这n块龙骨不能沿横向移动。
该铲斗,其由顶板、档板、铲板和两侧板围成家用垃圾斗形,其横向宽度等于或小于龙骨的横向宽度;该铲板,其纵向长度大于该顶板的纵向长度,但小于龙骨的纵向长度,其伸出端为锋利刀口;n个铲斗上顶板的外表面分别与连接为环形的这n块龙骨的外表面固定连接;这n个铲斗随这n块龙骨沿逆时针方向旋转时,其中任意一个铲斗位于最下面时其上铲板的锋利刀口指向前方,从而容易插入月球地面取得月壤,该铲斗上升时取得的月壤因受重力作用自动落进该铲斗的内腔中,该铲斗通过最高点转向下降时,该铲斗内腔中的月壤因重力作用自动下落,通过该返回器上的侧孔落到该返回器的内腔中。
该托板,其为倾斜矩形板,其下端位于其上端的前下方,其倾角等于端板的倾角,其纵向长度小于端板的纵向长度,其横向宽度等于两端板上两内侧向面之间的距离,其横向两端面分别与这两端板的两内侧向面固定连接,其支撑着位于前方的多个龙骨使之不向下弯曲。
该前撑板,其上端为直角三角形,其其余部分为矩形,其直角三角形斜面的倾角等于端板的倾角,其横向厚度等于端板的横向厚度;两前撑板,其分别竖立于该底板的前端,其两内侧向面彼此对置,其两内侧向面之间的距离等于两端板上两内侧向面之间的距离,其两下端面分别与相应位置的该底板的上表面固定连接,其两直角三角形的斜面分别与相应位置的这两端板的后端面固定连接。
该后撑板,其上端为直角三角形,其其余部分为矩形,其直角三角形斜面的倾角等于端板的倾角,其横向厚度等于端板的横向厚度,其高度大于前撑板的高度;两后撑板,其分别竖立于该底板上,其位于两前撑板的后方和该返回器的前方,其两内侧向面彼此对置,其两内侧向面之间的距离等于两端板上两内侧向面之间的距离,其两下端面分别与相应位置的该底板的上表面固定连接,其两直角三角形的斜面分别与相应位置的这两端板的后端面固定连接。
这两前撑板和这两后撑板共同将这两端板牢固固定在该月球车的底板上。
该批量采集和运输月壤系统的工作流程是这样的:
该返回器、该月球车和该采壤装置组合为整体,这个组合体安装在该运载火箭的整流罩中;该运载火箭将这个组合体送到地月转移轨道后,这个组合体与该运载火箭脱离,又经减速后转移至环月轨道,然后降落至月球地面。
该月球车在月球上降落时,其上四个行走装置的四个套筒相对底板的向下伸出量大,从而这四个行走装置上的四个行走轮均位于采壤装置上最下面铲斗的下方;该月球车降落到月球上后该采壤装置采集月壤时,调节这四个套筒使之相对该底板的向下伸出量减小,让最下面铲斗的铲板能够铲到月壤。
当该返回器的内腔中收集的月壤达到额定量时,该采壤装置与该月球车脱离留在月球上以减小重量;该返回器上的盖托和侧盖将该返回器上的侧孔封盖;该月球车上不再需要的器件,如导航制导控制系统、激光测距测速敏感器、激光三维成像敏感器、变推力发动机和相机都丢弃,以进一步减小重量;利用该月球车上剩余的推进剂,让捆绑在该返回器上的三台主发动机点火,将该月球车和该返回器带着采集的月壤升空到环月轨道,接着再转移到月地转移轨道,经过轨道修正和姿态调整,该返回器与该月球车分离;该返回器经惯性滑行、地球大气再入,其速度减小到第一宇宙速度;最后该返回器打开降落伞,其带着采集的月壤回收着陆,该月球车则在大气中烧毁。
至此,月壤的批量采集和运输任务完成。
采用这样的结构后,由于行走装置上的弹簧具缓冲吸能功能,从而使月球车在月球上降落时能够实现软着陆。
采用这样的结构后,由于行走装置上套筒在底板上可上下调节,月球车在月球上降落时套筒向下伸出量大,从而使采壤装置不会被撞坏;采壤装置采集月壤时调节套筒使其向下伸出量减小,铲斗便能铲到月球土壤。
采用这样的结构,是发明人受古老提水筒车的启发产生的灵感。竹筒在河中注满水后升到高处,竹筒翻转,水自动流到水槽。铲斗在月面取到月壤后升到高处,铲斗翻转,月壤自动落进返回器。古人的智慧让笨拙发明人茅塞顿开,实现了月壤自动进入返回器。
采用这样的结构,是发明人受龙骨水车的启发产生的灵感。n个铲斗通过n块龙骨连接成环形,类似于龙骨水车上的多块翻板通过多块龙骨连接成环形;本发明n个铲斗带着月壤源源不断上升,最后落进返回器的内腔中,类似于龙骨水车的多块翻板推着水源源不断上升,最后流到田里;本发明n块龙骨受两端板的的阻挡不能横向移动,类似于龙骨水车上多块翻板受两侧板的阻挡不能横向移动。得益于小时候使用过龙骨水车,想不到70年前获得的感性认识,促成了月壤的连续和快速采集,又提高了月壤采集的可靠性。
采用这样的结构后,由于铲斗上铲板的伸出端为锋利刀口,该锋利刀口很容易插入月壤中取得月壤,提高了采集月壤的效率。
采用这样的结构后,由于返回器上设置导板,使得月壤进入返回器内腔中后不会集中于一隅,而是充满整个内腔。
采用这样的结构后,月球车和返回器离月升空时,由于采壤装置留在月球上,由于月球车上不再使用的器件也留在月球上,返回器就能向地球载运更多月壤,提高了经济效益。
采用这样的结构后,人类利用外星资源首次成为可能,影响可能深远。
附图说明
下面结合附图对本发明的具体实施方式作进一步详细的说明。
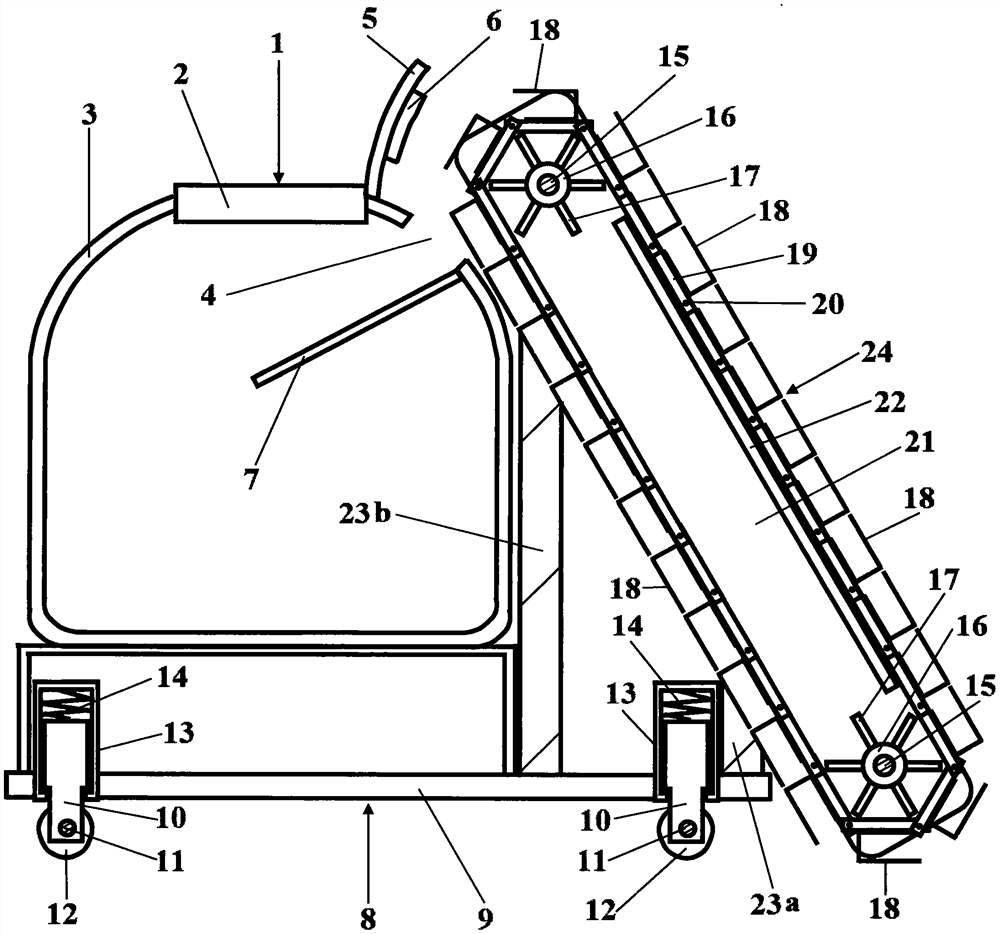
图1是批量采集和运输月壤系统的侧视示意图,但捆绑在返回器上的三个主发动机没有画出。
图2是图1中采壤装置去掉右端板后的侧视示意图,但行走装置上的套筒相对底板的向下伸出量减小。
图3是图1中最下面的铲斗和相邻铲斗的放大侧视示意图。
图4是相邻龙骨相互铰接的俯视示意图。
具体实施方式
如图1至图4各图所示,一种批量采集和运输月壤系统,含运载火箭、返回器1、月球车8和采壤装置24。
如图1、图2所示,该月球车8含底板9、行走装置、智能控制系统、导航制导控制系统、激光测距测速敏感器、激光三维成像敏感器、姿控发动机、变推力发动机、相机、电机、传感器、定向天线、通信设备、太阳翼和推进剂。
如图1、图2所示,该底板9为水平矩形板。
该导航制导控制系统,能根据激光测距测速敏感器和激光三维成像敏感器测得的数据,进行综合判断,操纵姿控发动机和变推力发动机,使该月球车8平稳降落在月球的平坦地面上。
该智能控制系统,能根据定向天线和通信设备接收的指令或传感器感知的情况,操纵相应电机完成相应动作;该定向天线和该通信设备还能向地球发送探测信息。
太阳翼展开时将太阳能转化为电能向需要用电的电机供电;
该月球车8携带的推进剂,既供该月球车8在落月之前和落月过程中,姿控发动机和变推力发动机工作时的消耗,又供该月球车8驼着该返回器1离月升空过程中的消耗。
四个行走装置分别竖直安装于该底板9四个转角处附近的该底板9上。
如图1、图2所示,这四个行走装置中的每个行走装置,均由轮柱10、轮轴11、行走轮12、套筒13和弹簧14组成。
如图1、图2所示,该套筒13,其下端敞开,其上端封闭,其竖直活动安装在该底板9上,其相对该底板9可上下调节,但不能沿其他方向移动,也不能从该底板9上脱离。
如图1、图2所示,该轮柱10由上圆柱体和下圆柱体连接为整体;该上圆柱体,其位于该套筒13的内腔中,其外径等于或小于该套筒13的内径,其轴向长度小于该套筒13内腔的高度,其在该套筒13的内腔中可上下自由滑动,也可以绕轴线自由转动,但不能从该套筒13的内腔中脱离;该下圆柱体,其从该套筒13的下端向下伸出,其下端为两个垂耳,这两个垂耳之间为空腔。
如图1、图2所示,该轮轴11,其水平穿过该轮柱10两垂耳之间的空腔,其两端分别与这两垂耳固定连接。
如图1、图2所示,该行走轮12,其位于该轮柱10两垂耳之间的空腔中,其套装在该轮轴11上,其可绕轴线自由转动,但不能沿轴向移动。
如图1、图2所示,该弹簧14,其处于压缩状态,其位于该套筒13的内腔中,其下端与该轮柱10的上端面活动接触,其上端与该套筒13内腔的顶腔面活动接触。
如图1、图2所示,该月球车8降落月球地面时,该弹簧14起缓冲吸能作用,从而实现该月球车8的软着陆。
如图1、图2所示,该返回器1含顶盖2、桶体3、降落伞、侧孔4、盖托5、侧盖6、导板7和主发动机。
该降落伞,其安装在该顶盖2中,其在该返回器1返回地球时自动打开,使该返回器1 减速下降并安全着陆。
如图1、图2所示,该桶体3为盛装月壤的容器。
如图1、图2所示,该侧孔4为圆孔,采集的月壤经其进到该桶体3的内腔中,其位于该顶盖2的前方,其在该桶体3未装月壤时是敞开的。
如图1、图2所示,该导板7为弧形直板,其一端与该侧孔4下方的该桶体3的内表面固定连接,其另一端倾斜向下伸在该桶体3内腔的中央,其使落到该桶体3内腔中的月壤能在该内腔中均匀分布。
如图1、图2所示,该盖托5和该侧盖6组合为整体;该侧盖6为外凸内凹圆板,其外径等于该侧孔4的内径;该盖托5亦为外凸内凹圆板,但其外径大于该侧盖6的外径,其用铰链连接在该桶体3的外表面上,该铰链位于该顶盖2的前方但接近该顶盖2;当该桶体3 内腔收集的月壤达额定量后,该月球车8上智能控制系统指示相应电机工作,使该侧盖6向下翻转进到该侧孔4中,将该侧孔4严密封堵,同时该盖托5的环形内表面与该侧孔4周围的该桶体3的外表面通过磁力吸附,将该侧孔4严密封盖。
三台主发动机竖直捆绑在该桶体3的外圆周表面上,这三台主发动机中相邻两主发动机对应的中心角为120°,这三台主发动机工作时提供的竖直向上的总推力,大于该返回器1、该月球车8和该返回器1内腔中盛装的月壤在月球上的总重力。
如图1、图2所示,该采壤装置24,其安装在该月球车8的前底板9上,其随同该月球车8和该返回器1降落在月球地面上,其专司月壤的采集,其含转轴15、转柱16、叉板17、铲斗18、龙骨19、铰接轴20、端板21、托板22、前撑板23a和后撑板23b。
如图1、图2所示,该端板21,其为条形竖直板,其下端位于其上端的前下方;两端板21彼此对置且分居该采壤装置24的两侧。
如图2所示,该转轴15,其为横向水平圆杆,其长度等于或大于这两端板21两外侧面之间的距离;两转轴15,其两端分别穿过这两端板21且与这两端板21固定连接,其中一个转轴15的两端分别接近这两端板21的上端,且分别位于这两端板21的中线上,另一个转轴15的两端分别接近这两端板21的下端,且分别位于这两端板21的中线上。
如图2所示,该转柱16,其为横向水平圆柱体,其轴向长度等于或小于这两端板21上两内侧向面之间的距离,其外径大于转轴15的外径;两转柱16,其分别同轴套装在这两转轴15上,其分别可绕各自轴线自由转动,但不能沿各自轴向移动。
如图2所示,该叉板17,其为矩形板,其横向宽度等于转柱16的轴向长度;每个转柱16圆周表面的周围沿径向均匀安装多块叉板17,这多块叉板17的里端均与相应位置的该转柱16的圆周表面固定连接,这多块叉板17的外端分别沿该转柱16的径向向外伸出。
如图2、图3、图4所示,该龙骨19,其为纵向凸字形板,其中、后部的横向宽度等于或小于转柱16的轴向长度,其前部的横向中央沿纵向向前伸出的伸出部分19a为矩形,其后部横向中央的缺口19b亦为矩形,但该伸出部分19a的纵向长度小于该缺口19b的纵向长度,该伸出部分19a的横向宽度小于该缺口19b的横向宽度;n块龙骨19依次连接成环形,相邻的前后两块龙骨19中,后一块龙骨19的伸出部分19a插入前一块龙骨19的缺口19b中,并用铰接轴20将这前后两块龙骨19铰接为一体;相邻两铰接轴20之间的距离等于转柱16 上相邻两叉板17外端之间的距离;连接成环形的这n块龙骨19套装在两转柱16的相应叉板17上,当这两转柱16中的任意一个转柱16在电机的驱动下绕轴线沿逆时针方向旋转时,通过相应叉板17的带动,这n块龙骨19沿环形线路也沿逆时针方向旋转,且带动另一个转柱16和这另一个转柱16上的叉板17也沿逆时针方向旋转;这n块龙骨19在旋转过程中,因受这两端板21的阻挡,这n块龙骨19不能沿横向移动。
如图2、图3所示,该铲斗18,其由顶板18a、档板18b、铲板18c和两侧板18d围成家用垃圾斗形,其横向宽度等于或小于龙骨19的横向宽度;该铲板18c,其纵向长度大于该顶板18a的纵向长度,但小于龙骨19的纵向长度,其伸出端为锋利刀口;n个铲斗18上顶板 18a的外表面分别与连接为环形的这n块龙骨19的外表面固定连接;这n个铲斗18随这n 块龙骨19沿逆时针方向旋转时,其中任意一个铲斗18位于最下面时其上铲板18c的锋利刀口指向前方,从而容易插入月球地面取得月壤,该铲斗18上升时取得的月壤因受重力作用自动落进该铲斗18的内腔中,该铲斗18通过最高点转向下降时,该铲斗18内腔中的月壤因重力作用自动下落,通过该返回器1上的侧孔4落到该返回器1的内腔中。
如图2所示,该托板22,其为倾斜矩形板,其下端位于其上端的前下方,其倾角等于端板21的倾角,其纵向长度小于端板21的纵向长度,其横向宽度等于两端板21上两内侧向面之间的距离,其横向两端面分别与这两端板21的两内侧向面固定连接,其支撑着位于前方的多个龙骨19使之不向下弯曲。
如图1、图2所示,该前撑板23a,其上端为直角三角形,其其余部分为矩形,其直角三角形斜面的倾角等于端板21的倾角,其横向厚度等于端板21的横向厚度;两前撑板23a,其分别竖立于该底板9的前端,其两内侧向面彼此对置,其两内侧向面之间的距离等于两端板21上两内侧向面之间的距离,其两下端面分别与相应位置的该底板9的上表面固定连接,其两直角三角形的斜面分别与相应位置的这两端板21的后端面固定连接。
如图1、图2所示,该后撑板23b,其上端为直角三角形,其其余部分为矩形,其直角三角形斜面的倾角等于端板21的倾角,其横向厚度等于端板21的横向厚度,其高度大于前撑板23a的高度;两后撑板23b,其分别竖立于该底板9上,其位于两前撑板23a的后方和该返回器1的前方,其两内侧向面彼此对置,其两内侧向面之间的距离等于两端板21上两内侧向面之间的距离,其两下端面分别与相应位置的该底板9的上表面固定连接,其两直角三角形的斜面分别与相应位置的这两端板21的后端面固定连接。
如图1、图2所示,这两前撑板23a和这两后撑板23b共同将这两端板21牢固固定在该月球车8的底板9上。
该批量采集和运输月壤系统的工作流程是这样的:
如图1、图2所示,该返回器1、该月球车8和该采壤装置24组合为整体,这个组合体安装在该运载火箭的整流罩中;该运载火箭将这个组合体送到地月转移轨道后,这个组合体与该运载火箭脱离,又经减速后转移至环月轨道,然后降落至月球地面。
如图1所示,该月球车8在月球上降落时,其上四个行走装置的四个套筒13相对底板9 的向下伸出量大,从而这四个行走装置上的四个行走轮12均位于采壤装置24上最下面铲斗 18的下方;如图2所示,该月球车8降落到月球上后该采壤装置24采集月壤时,调节这四个套筒13使之相对该底板9的向下伸出量减小,让最下面铲斗18的铲板18c能够铲到月壤。
如图1、图2所示,当该返回器1的内腔中收集的月壤达到额定量时,该采壤装置24与该月球车8脱离留在月球上以减小重量;该返回器1上的盖托5和侧盖6将该返回器1上的侧孔4封盖;该月球车8上不再需要的器件,如导航制导控制系统、激光测距测速敏感器、激光三维成像敏感器、变推力发动机和相机都丢弃,以进一步减小重量;利用该月球车8上剩余的推进剂,让捆绑在该返回器1上的三台主发动机点火,将该月球车8和该返回器1带着采集的月壤升空到环月轨道,接着再转移到月地转移轨道,经过轨道修正和姿态调整,该返回器1与该月球车8分离;该返回器1经惯性滑行、地球大气再入,其速度减小到第一宇宙速度;最后该返回器1打开降落伞,其带着采集的月壤回收着陆,该月球车8则在大气中烧毁。
至此,月壤的批量采集和运输任务完成。
上面结合附图对本发明的实施方式作了详细说明。本发明并不限于上述实施方式,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。在不脱离本发明宗旨的前提下作出的各种变化,仍属于本发明的范围。
- 批量采集和运输月壤系统
- 一种用于批量信息采集的标本架及标本信息采集系统