膝关节康复牵伸器
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及医疗康复设备技术领域,特别涉及膝关节康复牵伸器。
背景技术
腿部创伤后,因膝盖长时间未活动,常见膝关节僵硬,造成患者日常生活障碍,膝关节僵硬常常导致膝关节周围软组织,包括关节囊肌腱韧带等出现挛缩。由于软组织有一定弹性,需要长时间的牵伸治疗,拉长膝关节周围软组织。目前,市面上膝关节牵伸器为单一屈曲牵伸,康复效果欠佳。
发明内容
为解决上述技术问题,本发明的目的是提供膝关节康复牵伸器,即在传统单一屈曲牵伸机构的基础上,设置腿部长度方向的拉伸机构,使膝关节在拉伸状态下实现屈曲动作,康复效果更快更好,具体结构如下。
本发明提供技术方案如下:
膝关节康复牵伸器,包括后肢体固定托、前肢体固定托、后肢体转动臂、转动轴、前肢体转动臂、后肢体绷带、前肢体绷带,所述后肢体转动臂与所述后肢体固定托固定连接,所述前肢体转动臂与所述前肢体固定托固定连接,所述前肢体转动臂和所述后肢体转动臂通过所述转动轴连接,所述后肢体转动臂和/或前肢体转动臂为可伸缩结构。
优选地,所述后肢体转动臂包括第一外套管和第一内套管,所述第一外套管和第一内套管均设置若干小孔,通过不同小孔的对应并通过插销固定,实现后肢体转动臂的伸缩。
优选地,所述前肢体转动臂包括第二外套管和第二内套管,所述第二外套管和第二内套管均设置若干小孔,通过不同小孔的对应并通过插销固定,实现前肢体转动臂的伸缩。
优选地,所述小孔之间的间隔1mm~2mm。
优选地,所述后肢体转动臂包括第一外套管和第一内套管,所述第一外套管两侧对称矩形孔,所述第一内套管两侧对称设置弹性件,所述弹性件为斜坡状,所述弹性件与所述矩形孔实现卡合。
优选地,所述前肢体转动臂包括第二外套管和第二内套管,所述第二外套管两侧对称矩形孔,所述第二内套管两侧对称设置弹性件,所述弹性件为斜坡状,所述弹性件与所述矩形孔实现卡合。
优选地,所述矩形孔间隔1mm~2mm。
优选地,所述后肢体绷带和前肢体绷带均设置有防滑垫。
优选地,所述转动轴的驱动力为电动、气动、手动中的一种。
优选地,所述防滑垫厚度为1mm~2mm。
通过上述技术方案,技术效果如下:
通过后肢体转动臂和/或前肢体转动臂设置可伸缩结构,在膝关节屈曲之前,将后肢体转动臂和/或前肢体转动臂进行伸长,使膝关节有牵伸感,处于被牵伸状态,维持数分钟后,会使膝关节周围软组织软化,然后,再进行膝关节屈曲及伸直活动,通过上述结构,能够实现在屈曲的过程中,维持膝关节被牵伸的状态,使得膝关节康复效果更快更好,缩短了患者康复时间。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
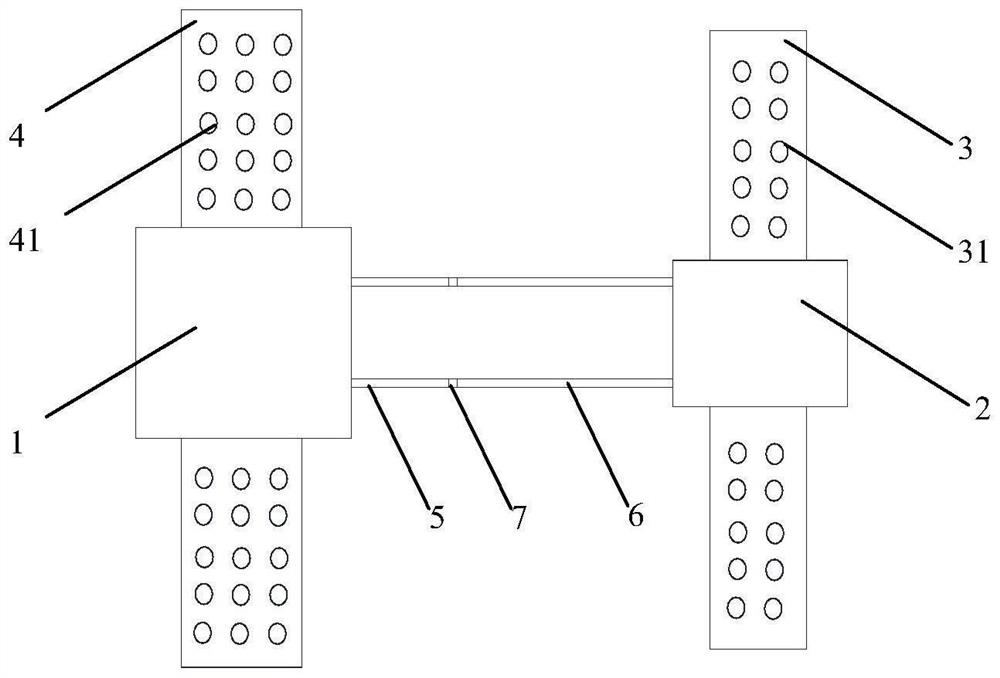
图1是本发明的俯视展开示意图。
图2是本发明的第一立体示意图。
图3是本发明的第二立体示意图。
图4是本发明的第一侧视示意图。
图5是本发明的第二侧视示意图。
图6是本发明的第二内套管主视示意图。
图7是本发明的第二内套管侧视示意图。
图8是本发明的第一内套管主视示意图。
其中,1、后肢体固定托;2、前肢体固定托;3、前肢体绷带;31、前肢体防滑垫;4、后肢体绷带;41、后肢体防滑垫;5、后肢体转动臂;51、第一外套管小孔;52、第一外套管矩形孔;6、前肢体转动臂;61、第二外套管小孔;62、第二外套管矩形孔;7、转动轴;8、第二内套管;81、弹性件;9、第一内套管;91、第一内套管小孔。
具体实施方式
下面将结合具体实施例,对本发明的技术方案作详细说明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落入本申请所附权利要求所限定的范围内。
在本发明的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"竖直"、"水平"、"顶"、"底"、"内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
实施例1
膝关节康复牵伸器,如图1、图2所示,包括后肢体固定托1、前肢体固定托2、后肢体转动臂5、转动轴7、前肢体转动臂6、后肢体绷带4、前肢体绷带3,所述后肢体转动臂5与所述后肢体固定托1固定连接,所述前肢体转动臂6与所述前肢体固定托2固定连接,所述前肢体转动臂6和所述后肢体转动臂5通过所述转动轴7连接,所述后肢体转动臂5和/或前肢体转动臂6为可伸缩结构。
在该实施例中,通过后肢体转动臂5和/或前肢体转动臂6设置可伸缩结构,在膝关节屈曲之前,将后肢体转动臂5和/或前肢体转动臂6进行伸长,使膝关节有牵伸感,处于被牵伸状态,维持数分钟后,会使膝关节周围软组织软化,然后,再进行膝关节屈曲及伸直活动,通过上述结构,能够实现在屈曲的过程中,维持膝关节被牵伸的状态,使得膝关节康复效果更快更好,缩短了患者康复时间。
作为优选实施例,如图2、图4和图8所示,所述后肢体转动臂5包括第一外套管和第一内套管9,所述第一外套管和第一内套管9均设置若干小孔,通过不同小孔的对应并通过插销固定,实现后肢体转动臂的伸缩。
在该实施例中,所述第一外套管和第一内套管9组成了后肢体转动臂5,通过第一外套管小孔51和第一内套管小孔91的对应,并通过插销固定,实现后肢体转动臂5的伸长或缩短,在伸长情况下实现膝关节的拉伸,由于小孔具有多个,因此可以实现对膝关节的分级拉伸,根据患者具体情况进行分级拉伸。
作为优选实施例,如图2、图4所示,所述前肢体转动臂6包括第二外套管和第二内套管,所述第二外套管和第二内套管均设置若干小孔,通过不同小孔的对应并通过插销固定,实现前肢体转动臂6的伸缩。
在该实施例中,所述第二外套管和第二内套管(第二内套管的结构与图8所示的第一内套管9的结构原理相同)组成了前肢体转动臂6,通过第二外套管小孔61和第二内套管小孔的对应,并通过插销固定,实现前肢体转动臂6的伸长或缩短,在伸长情况下实现膝关节的拉伸,由于小孔具有多个,因此可以实现对膝关节的分级拉伸,根据患者具体情况进行分级拉伸。
需要说明的是,在该实施例中,前肢体转动臂6、后肢体转动臂5两者同时具有伸缩功能,或者之一具有伸缩功能,均可以实现膝关节的拉伸。
作为优选实施例,所述小孔之间的间隔1mm~2mm。
在该实施例中,小孔之间的距离设置为1mm~2mm,可以实现膝关节1mm~2mm的分级拉伸,有助于针对不同患者,也有助于对同一患者根据拉伸接受度进行分级调节。
作为优选实施例,如图1所示,所述后肢体绷带4和前肢体绷带3均设置有防滑垫。
在该实施例中,后肢体绷带4设置有后肢体防滑垫41,前肢体绷带3设置有前肢体防滑垫31,此设计与后肢体固定托1、前肢体固定托2配合,更加牢固地固定前后肢,在实施膝关节拉伸时,防止后肢体固定托1、前肢体固定托2与腿部之间的滑动,同时,因膝关节的拉伸时间要求保持一定时间,如20秒,有助于避免抵消膝关节的拉伸效果。
作为优选实施例,其特征在于,所述转动轴7的驱动力为电动、气动、手动中的一种。
在该实施例中,转动轴7的驱动力可以为电动、气动、手动中的一种,因本发明的主要改进点不在于转动轴7的驱动力,具体的驱动结构未进行进一步描述,不会影响本领域技术人员对本发明实质内容的理解。
作为优选实施例,其特征在于,所述防滑垫厚度为1mm~2mm。
在该实施例中,防滑垫厚度为1mm~2mm,防滑垫太薄会影响防滑效果,太厚情况下,会使患者产生不适感,为此,将防滑垫厚度设置为1mm~2mm。
实施例2
膝关节康复牵伸器,如图1、图3所示,包括后肢体固定托1、前肢体固定托2、后肢体转动臂5、转动轴7、前肢体转动臂6、后肢体绷带4、前肢体绷带3,所述后肢体转动臂5与所述后肢体固定托1固定连接,所述前肢体转动臂6与所述前肢体固定托2固定连接,所述前肢体转动臂6和所述后肢体转动臂5通过所述转动轴7连接,所述后肢体转动臂5和/或前肢体转动臂6为可伸缩结构。
在该实施例中,通过后肢体转动臂5和/或前肢体转动臂6设置可伸缩结构,在膝关节屈曲之前,将后肢体转动臂5和/或前肢体转动臂6进行伸长,使膝关节有牵伸感,处于被牵伸状态,维持数分钟后,会使膝关节周围软组织软化,然后,再进行膝关节屈曲及伸直活动,通过上述结构,能够实现在屈曲的过程中,维持膝关节被牵伸的状态,使得膝关节康复效果更快更好,缩短了患者康复时间。
作为优选实施例,如图3、图5、图6和图7所示,所述后肢体转动臂5包括第一外套管和第一内套管,所述第一外套管两侧对称矩形孔,所述第一内套管两侧对称设置弹性件,所述弹性件为斜坡状,所述弹性件与所述矩形孔实现卡合。
在该实施例中,所述第一外套管和第一内套管组成了后肢体转动臂5,通过第一外套管矩形孔52和第一内套管弹性件的对应和卡合,实现后肢体转动臂5的伸长或缩短,在伸长情况下实现膝关节的拉伸,由于矩形孔具有多个,因此可以实现对膝关节的分级拉伸,根据患者具体情况进行分级拉伸。
在该实施例中,所述第一内套管及其弹性件设计原理与第二内套管8及其弹性件81的设计原理相同,即弹性件81为斜坡状且具有弹性,在拉伸时,弹性件81对应不同的矩形孔时,实现不同长度的膝关节拉伸。
作为优选实施例,如图3、图5、图6、图7和图8所示,所述前肢体转动臂6包括第二外套管和第二内套管8,所述第二外套管两侧对称矩形孔,所述第二内套管8两侧对称设置弹性件81,所述弹性件81为斜坡状,所述弹性件81与所述矩形孔实现卡合。
在该实施例中,所述第二外套管和第二内套管8组成了前肢体转动臂6,通过第二外套管矩形孔62和第二内套管弹性件81的对应和卡合,实现前肢体转动臂6的伸长或缩短,在伸长情况下实现膝关节的拉伸,由于矩形孔具有多个,因此可以实现对膝关节的分级拉伸,根据患者具体情况进行分级拉伸。
需要说明的是,在该实施例中,前肢体转动臂6、后肢体转动臂5两者同时具有伸缩功能,或者之一具有伸缩功能,均可以实现膝关节的拉伸。
作为优选实施例,所述矩形孔间隔1mm~2mm。
在该实施例中,矩形孔之间的距离设置为1mm~2mm,可以实现膝关节1mm~2mm的分级拉伸,有助于针对不同患者,也有助于对同一患者根据拉伸接受度进行分级调节。
作为优选实施例,如图1所示,所述后肢体绷带4和前肢体绷带3均设置有防滑垫。
在该实施例中,后肢体绷带4设置有后肢体防滑垫41,前肢体绷带3设置有前肢体防滑垫31,此设计与后肢体固定托1、前肢体固定托2配合,更加牢固地固定前后肢,在实施膝关节拉伸时,防止后肢体固定托1、前肢体固定托2与腿部之间的滑动,同时,因膝关节的拉伸时间要求保持一定时间,如20秒,有助于避免抵消膝关节的拉伸效果。
作为优选实施例,其特征在于,所述转动轴7的驱动力为电动、气动、手动中的一种。
在该实施例中,转动轴7的驱动力可以为电动、气动、手动中的一种,因本发明的主要改进点不在于转动轴7的驱动力,具体的驱动结构未进行进一步描述,不会影响本领域技术人员对本发明实质内容的理解。
作为优选实施例,其特征在于,所述防滑垫厚度为1mm~2mm。
在该实施例中,防滑垫厚度为1mm~2mm,防滑垫太薄会影响防滑效果,太厚情况下,会使患者产生不适感,为此,将防滑垫厚度设置为1mm~2mm。
- 膝关节康复牵伸器
- 一种膝关节牵伸康复装置