一种车载探地雷达里程触发装置
文献发布时间:2023-06-19 11:29:13
技术领域
本发明属于探地雷达技术领域,具体涉及一种车载探地雷达里程触发装置。
背景技术
随着我国公路建设的发展,新建道路质量的检测任务日益加重;同时在道路的后期维护过程中,路况质量评价的工作量也会急剧增大,在不影响正常车辆行驶及不破坏路面原有结构的基础上,为准确控制公路工程的建设质量和评价公路的运营使用情况,车载探地雷达的应用越来越广泛。车载探地雷达方法以经济、快速、连续、无损且直观等特点成为浅部地球物理勘察的重要工具之一。在工作过程中,安装在车载探地雷达的轮式里程触发装置,每隔一段距离触发一个数据采集脉冲信号,雷达采集一道雷达回波,从而实现对道路下方的地下空间进行剖面成像检测。雷达数据数据处理后期,根据里程数据对探明的道路下异常体位置进行定位。
车载探地雷达在进行城市道路地下空间勘察时,由于道路不平、车速较快,出现轮式里程装置打滑或悬空状态,导致里程触发装置的触发信号出现不连续,这样直接导致最终的定位精度降低,并且经过长时间运行,里程误差累加较大,无法精确定位道路下方异常体位置,降低车载探地雷达的工作效率。
发明内容
本发明需解决的技术问题是提供一种高精度车载探地雷达里程触发装置,减小或降低复杂路况对雷达系统里程精度的影响,满足高精度定位城市道路下异常体位置的要求。
为解决上述技术问题,本发明提供了一种车载探地雷达里程触发装置,采取技术方案是:
所述探地雷达里程触发装置包括:里程轮、滤波处理模块、里程优选模块、正交解码模块、里程计算模块;
所述里程轮为多部,分别安装在车载探地雷达不同位置,随着车载探地雷达的移动产生增量方波脉冲AB信号;
所述滤波处理模块用于对各路里程轮增量方波脉冲AB信号进行滤波处理;
所述里程优选模块对各路滤波后的增量方波脉冲AB信号进行优选处理,输出一路优选的增量方波脉冲AB信号,同时产生里程触发信号,输出给探地雷达主控单元;
所述正交解码模块用于对优选的增量方波脉冲AB信号进行正交解码处理,产生里程编码绝对值号和运动方向信号;
所述里程计算模块根据增量型编码器线数和里程编码绝对值计算车载探地雷达的里程值。
进一步地,所述滤波处理模块包括施密特触发器和三时钟周期延时滤波器,所述增量方波脉冲AB信号首先通过施密特缓冲器,抑制信号中缓慢的、电平较低的干扰信号,然后通过延时滤波器,在三个时钟周期采样信号,并贮存在三位移位寄存器中,连续三个时钟周期不变的信号被判为有效。
进一步地,所述里程优选模块对各路滤波后的增量方波脉冲AB 信号进行测频计算,优选频率最高的那一路增量方波脉冲AB信号作为输出信号。
进一步地,所述里程优选模块为CPLD电路,所述多部里程轮产生的多路增量方波脉冲AB信号经过滤波电路滤波后输入CPLD电路, CPLD电路计算多部里程轮的增量方波脉冲AB信号的频率,并将最高频率的里程轮增量方波脉冲AB信号输出给正交解码模块,将里程触发信号输出给探地雷达主控单元。
进一步地,所述正交解码模块将输入信号乘以一个4倍因子,使里程轮增量方波脉冲AB信号4倍频。
与现有技术对比,本发明有益效果如下:
(1)提高了车载雷达的里程精度,提高现场作业效率。在道路条件比较恶劣的条件下,单个里程轮可能由于打滑等原因导致丢失脉冲,而本发明使用多个里程轮,极大降低了脉冲丢失的概率,解决了里程触发装置的触发信号出现不连续的问题。本发明将里程轮脉冲4 倍频,提高了信号的实时性,进一步增加了里程测量的精度。
(2)提高车载雷达的里程系统的可靠性。里程轮包含增量编码器,长期工作在震动、雨林的环境下,容易损坏。本发明可以有效的避免由于现场里程轮故障导致无法正常作业的情况,即使出现一部里程轮故障,其余两个部里程轮可继续保持里程系统的工作正常。
(3)提高里程轮信号的抗干扰能力。外界的电磁波容易在里程轮信号上产生干扰信号,尤其是电动机系统中产生的火花干扰。本发明通过滤波电路有效滤除了外部电磁干扰,避免由于干扰信号触发而产生伪数据,提高了里程轮测距的稳定性。
附图说明
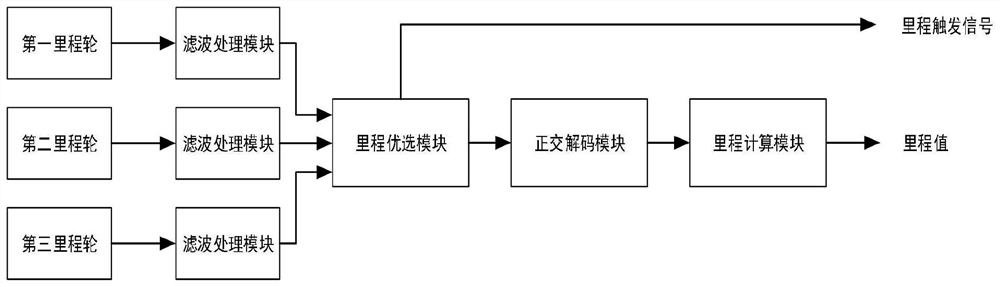
图1为本发明实施例中的车载探地雷达里程触发装置原理示意图;
图2为本发明实施例中的探地雷达安装三部里程轮示意图;
图3为本发明实施例中的对三路增量方波脉冲AB信号进行滤波和优选示意图;
图4为本发明实施例中的正交解码模块组成原理示意图;
图5为本发明实施例中的A相信号与B相信号相位差为90°的示意图;
图5(a)为本发明实施例中的A相信号较B相信号相位超前90°的示意图;
图5(b)为本发明实施例中的A相信号较B相信号相位滞后90°的示意图。
具体实施方式
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本申请一部分,并与本发明的实施例一起用于阐释本发明的原理。
图1为本发明实施例中的车载探地雷达里程触发装置原理示意图,包括:里程轮、滤波处理模块、里程优选模块、正交解码模块、里程计算模块。
所述里程轮共三部,包括第一里程轮、第二里程轮和第三里程轮,分别安装在车载探地雷达不同位置,如图2所示。三个里程轮的测距轮半径均相同,随着车载探地雷达的移动产生增量方波脉冲信号。里程轮由测距轮和增量型编码器组成,利用光电旋转原理输出增量方波脉冲AB信号,即增量方波脉冲A信号和方波脉冲B信号,简称A相信号和B相信号。所述A相信号和B相信号相位相差90度,可通过比较A相信号和B相信号两相的超前和滞后判别里程轮的正、反转。
如图3所示,所述滤波处理模块包括六组滤波电路,分别对三部里程轮各路增量方波脉冲AB信号进行滤波处理,从而提高增量方波脉冲AB信号的抗干扰能力。滤波电路采用施密特触发器和一个三时钟周期延时滤波器共同滤除电平较低的噪声以及电平较高但持续时间较短的火花干扰。工作原理为:增量方波脉冲AB信号首先通过施密特缓冲器,抑制信号中缓慢的、电平较低的干扰信号。然后通过延时滤波器,在三个时钟周期采样信号,并贮存在三位移位寄存器中。连续三个时钟周期不变的信号被判为有效,从而有效抑制持续时间较短的干扰信号。
具体的,所述滤波电路由施密特触发器(如选用 SN74AUP1G17-EP)、D触发器(如选用SN74LVC1G79)、三输入与门(如选用SN74LVC1G11-Q1)、JK触发器(如选用SN74LS112A)组成。
所述里程优选模块对三路滤波后的增量方波脉冲AB信号进行测频计算,优选频率最高的那一路增量方波脉冲AB信号作为输出信号。同时对A相信号进行缓冲放大产生里程触发信号,触发车载探地雷达进行数据采集。
如图3所示,所述里程优选模块为CPLD芯片,所述三部里程轮产生的六路增量方波脉冲分别经过滤波电路滤波后输入CPLD芯片 (型号EPM240T100C5N),CPLD计算三个里程轮A相信号和B相信号的频率,并将最高频率的里程轮信号输出给正交解码模块,将里程触发信号输出给雷达主控单元。
所述正交解码模块用于对优选的一路增量方波脉冲AB信号进行正交解码处理,产生里程编码绝对值和运动方向信号。该模块将输入信号译码成计数信号,该电路输入信号乘以一个4倍因子,使编码器的分辨率提高4倍。
如图4所示,所述正交解码模块由异或门(如选用型号 SN74LVC2G86)、非门(如选用型号SN74AUP1G04)、缓冲器(如选用型号SN74AUP1G34)、计数器(如选用型号SN74ALS869)、D触发器(如选用SN74LVC1G79)等组成。
所述正交解码模块对滤波后的增量方波脉冲AB信号进行采样,基于过去和现在的信号状态(过去的信号状态是指在每个A相位信号或B相位信号的周期内能采集到4个脉冲,否则说明里程轮信号出现异常;现在的信号状态是指A相或B相的信号),给出32bit计数器提供一个计数信号即里程编码绝对值和一个方向信号。具体如下:
由于A相信号与B相信号相位差为90°,如图5(a)和图5(b) 所示,当里程轮的增量方波脉冲A相信号输入D触发器的输入端,B 相信号输入D触发器的时钟端,当A相信号在前,B相信号在后时,D触发器的时钟到来时D为高电平,因此D触发器输出高电平,此时方向为正,计数器根据脉冲数进行加计数;当B相信号在前,A相信号在后时,D触发器的时钟到来时D为低电平,因此D触发器输出低电平,此时方向为负,计数器根据脉冲数进行减计数。里程编码绝对值由计数器完成,计数器记录输入信号的脉冲数,并根据方向加计数或者减计数,从而实现里程的绝对位置编码。
所述正交解码模块将输入信号乘以一个4倍因子,即里程轮的增量方波信号经过4倍频后进入计数器,计数器的计数值较里程轮增量方波信号提高了4倍,因此编码器的分辨率提高了4倍。具体如下:
A相信号与B相信号相位差为90°,如图5(a)和图5(b)所示,A相信号与B相信号进入异或门之后,以第一种信号为例(图5 (a)所示),输出的脉冲为1010,此信号再进入后续电路,第二个异或门在没有信号输入时保持输出零,当信号到来时,若第一个异或门输出信号为0,则经过非门信号变为1,另外一路仍为0,因此第二个异或门将输出高电平,然后经过非门的信号经过电容与电阻短时间放电后,第二个异或门的输入又都变成了0,因此第二个异或门又输出低电平;第一个异或门的输出为1时,非门电路不变,缓冲器电路由1变零,第二个异或门也输出一个脉冲;即每当第一个异或门有一次输出,第二个异或门产生一个脉冲,将第一个异或门的1010信号转变成4个脉冲信号,实现了分辨率变为原来的4倍的功能。
所述里程计算模块根据增量型编码器线数和里程编码绝对值计算车载探地雷达的里程值。计算公式如下:
式中,d为里程值,R为测距轮半径,n为增量型编码器线数,m 为里程编码绝对值。
- 一种车载探地雷达里程触发装置
- 一种阵列式探地雷达的车载装置