一种智能遥感无人机结构
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及无人机,更具体的说是一种智能遥感无人机结构。
背景技术
目前,公知的一种植保无人机喷洒系统,包括:植保无人机和地面站;植保无人机包括飞行模块、飞行控制模块和喷洒模块,喷洒模块包括依次连接的水箱、水泵、流量计和喷头;地面站根据作业区域信息、待喷洒作物信息和植保无人机的信息,确定待喷洒作物的目标喷洒量、植保无人机的目标飞行速度和植保无人机的飞行线路信息并发送给飞行控制模块;飞行控制模块控制飞行模块按照飞行线路和目标飞行速度飞行,并通过监控流量计的流量信息,控制水泵的转速和飞行模块的飞行速度,以使水箱中装载的药液按照目标喷洒量从喷头中喷出;但是现有技术中的无人机无法调整飞行臂竖直方向上的位置。
发明内容
本发明的目的是提供一种智能遥感无人机结构,可以调整飞行臂竖直方向上的位置。
本发明的目的通过以下技术方案来实现:
一种智能遥感无人机结构,包括支撑框架、安装框架、连接底板和间隙腔体,支撑框架上固定连接有安装框架,安装框架的左右两侧均固定连接有间隙腔体,支撑框架的后端固定连接有连接底板;
一种智能遥感无人机结构,还包括安装支架和支撑轴,安装支架上固定连接有支撑轴;
一种智能遥感无人机结构,还包括摆动电机、摆动带轮、飞行臂、螺旋桨和转动支架,摆动电机固定连接在安装支架上,摆动带轮转动连接在支撑轴上,摆动带轮上固定连接有飞行臂,飞行臂上转动连接有转动支架,转动支架上连接有螺旋桨,摆动电机的输出轴和摆动带轮带传动连接;
一种智能遥感无人机结构,还包括横移支架、横移电机、间隙球体和摆动耳,横移支架上固定连接有横移电机,安装支架滑动连接在横移支架上,安装支架通过螺纹连接在横移电机的输出轴上,横移支架上固定连接有间隙球体,间隙球体上固定连接有摆动耳,两个间隙腔体内均间隙配合有间隙球体;
一种智能遥感无人机结构,还包括伸缩机构Ⅰ、升降齿条、传动部件和角度带轮,两个安装支架上均固定连接有伸缩机构Ⅰ,两个伸缩机构Ⅰ的伸缩端均固定连接有升降齿条,两个支撑轴上均转动连接有传动部件,传动部件和对应的升降齿条啮合传动,两个转动支架上均固定连接有角度带轮,角度带轮和对应的传动部件传动连接;
一种智能遥感无人机结构,还包括拉动电机和拉动框架,支撑框架上固定连接有拉动电机,拉动电机的输出轴上通过螺纹连接有拉动框架,拉动框架滑动连接在支撑框架上,两个摆动耳的内侧均滑动连接在拉动框架上;
一种智能遥感无人机结构,还包括伸缩机构Ⅱ和拉动绳,支撑框架设置有两个,两个连接底板之间均固定连接有多个复位弹簧,其中一个连接底板上固定连接有多个伸缩机构Ⅱ,每个伸缩机构Ⅱ的伸缩端上均固定连接有拉动绳,多个拉动绳的另一端均固定连接在另一个连接底板上。
本发明一种智能遥感无人机结构的有益效果为:
本发明一种智能遥感无人机结构,可以通过摆动电机驱动飞行臂在竖直方向上进行摆动,进而调整飞行臂的位置;
横移电机通过螺纹带动安装支架进行横线运动,进而调整飞行臂的位置;
通过伸缩机构Ⅰ带动升降齿条进行升降运动,升降齿条带动传动部件进行转动,进而带动转动支架发生转动,进而调整螺旋桨的偏转方向;
通过拉动电机拉动拉动框架进行运动,进而拉动两个摆动耳进行运动,使得飞行臂在前后方向上进行摆动运动,调整飞行臂的位置。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
图1是本发明的智能遥感无人机结构第一实施例结构示意图;
图2是本发明的智能遥感无人机结构第二实施例结构示意图一;
图3是本发明的智能遥感无人机结构第三实施例结构示意图一;
图4是本发明的智能遥感无人机结构第三实施例结构示意图二;
图5是本发明的智能遥感无人机结构第二实施例结构示意图二;
图6是本发明的智能遥感无人机结构第四实施例结构示意图一;
图7是本发明的智能遥感无人机结构第四实施例结构示意图二;
图8是本发明的智能遥感无人机结构第五实施例结构示意图一;
图9是本发明的智能遥感无人机结构第五实施例结构示意图二;
图10是本发明的智能遥感无人机结构第五实施例结构示意图三。
图中:
支撑框架11;
安装框架12;
连接底板13;
间隙腔体14;
安装支架21;
支撑轴22;
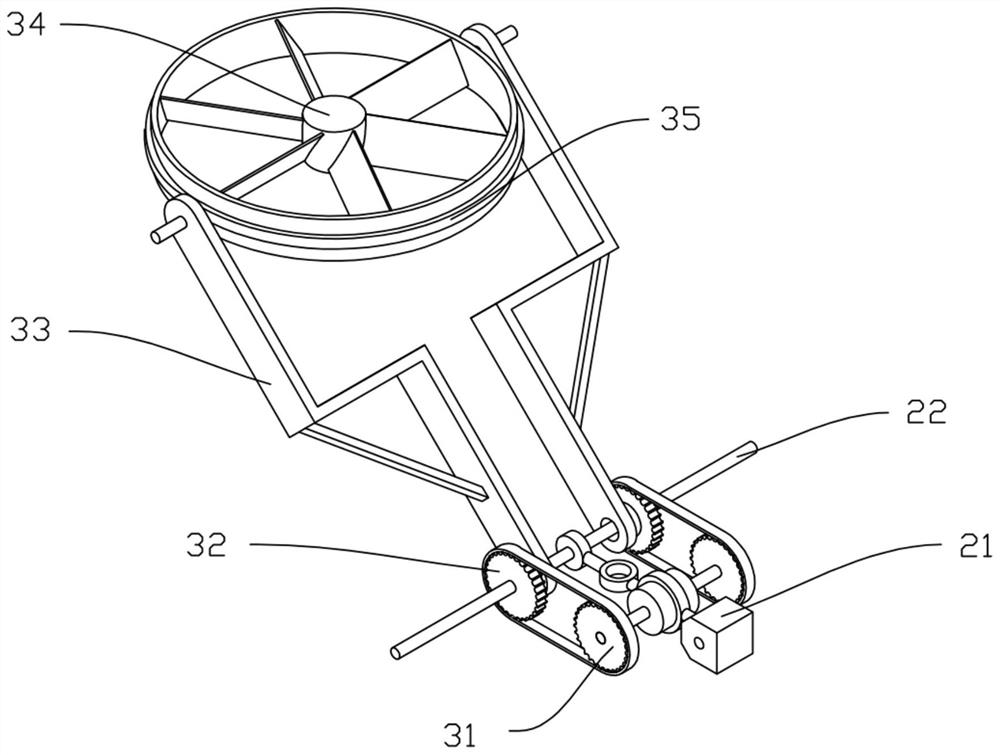
摆动电机31;
摆动带轮32;
飞行臂33;
螺旋桨34;
转动支架35;
横移支架41;
横移电机42;
间隙球体43;
摆动耳44;
伸缩机构Ⅰ51;
升降齿条52;
传动部件53;
角度带轮54;
拉动电机61;
拉动框架62;
伸缩机构Ⅱ72;
拉动绳72。
具体实施方式
下面结合附图对本发明作进一步详细说明。
下面结合图1至10说明第一实施例,一种智能遥感无人机结构,包括支撑框架11、安装框架12、连接底板13和间隙腔体14,支撑框架11上固定连接有安装框架12,安装框架12的左右两侧均固定连接有间隙腔体14,支撑框架11的后端固定连接有连接底板13;
一种智能遥感无人机结构,还包括安装支架21和支撑轴22,安装支架21上固定连接有支撑轴22;
一种智能遥感无人机结构,还包括摆动电机31、摆动带轮32、飞行臂33、螺旋桨34和转动支架35,摆动电机31固定连接在安装支架21上,摆动带轮32转动连接在支撑轴22上,摆动带轮32上固定连接有飞行臂33,飞行臂33上转动连接有转动支架35,转动支架35上连接有螺旋桨34,摆动电机31的输出轴和摆动带轮32带传动连接;
使用时启动螺旋桨34,螺旋桨34上设置有可以驱动螺旋桨34进行转动的动力装置,图中并没有画出,本领域技术人员可以自行设置,动力装置可以是电机或者内燃机等,动力装置驱动螺旋桨34进行转动,使得螺旋桨34产生向上的升力,进而带动装置起飞,当装置在飞行的过程中,需要调整飞行臂33的偏转位置时,即调整飞行臂33在竖直方向上的位置时,启动摆动电机31,摆动电机31的输出轴开始转动,摆动电机31带动摆动带轮32进行转动,摆动带轮32在支撑轴22上发生转动,摆动电机31优选为伺服电机,摆动带轮32带动其上固定连接的飞行臂33进行摆动,飞行臂33带动转动支架35进行运动,转动支架35带动螺旋桨34进行运动,进而调整飞行臂33在竖直方向上的摆动位置,可以整体的收纳装置在飞行过程的宽度,也可以根据使用需求调整螺旋桨34的位置,使得螺旋桨34位于支撑框架11的下侧或者上侧,满足不同的使用需求。
下面结合图1至10说明第二实施例,一种智能遥感无人机结构,还包括横移支架41、横移电机42、间隙球体43和摆动耳44,横移支架41上固定连接有横移电机42,安装支架21滑动连接在横移支架41上,安装支架21通过螺纹连接在横移电机42的输出轴上,横移支架41上固定连接有间隙球体43,间隙球体43上固定连接有摆动耳44,两个间隙腔体14内均间隙配合有间隙球体43;
需要调整飞行臂33的横向位置时,启动横移电机42,横移电机42优选为伺服电机,横移电机42的输出轴开始转动,横移电机42的输出轴通过螺纹带动安装支架21在横移支架41上进行横向运动,进而调整安装支架21的横向位置,安装支架21带动摆动电机31进行运动,安装支架21带动支撑轴22进行运动,支撑轴22带动摆动带轮32进行运动,摆动带轮32带动飞行臂33进行运动,飞行臂33带动转动支架35进行运动,转动支架35带动螺旋桨34进行运动,进而调整螺旋桨34的位置,根据使用需求调整螺旋桨34的横向位置,进而满足不同的使用需求。
下面结合图1至10说明第三实施例,一种智能遥感无人机结构,还包括伸缩机构Ⅰ51、升降齿条52、传动部件53和角度带轮54,两个安装支架21上均固定连接有伸缩机构Ⅰ51,两个伸缩机构Ⅰ51的伸缩端均固定连接有升降齿条52,两个支撑轴22上均转动连接有传动部件53,传动部件53和对应的升降齿条52啮合传动,两个转动支架35上均固定连接有角度带轮54,角度带轮54和对应的传动部件53传动连接;
在飞行的过程中,需要调整螺旋桨34的偏转位置时,即使得螺旋桨34发生偏转,进而产生不同方向的分力,使得装置在飞行过程中进行横移等运动,启动伸缩机构Ⅰ51,伸缩机构Ⅰ51可以是液压缸或者电动推杆,伸缩机构Ⅰ51的伸缩端进行运动,伸缩机构Ⅰ51的伸缩端带动升降齿条52进行运动,升降齿条52向上或者向下进行运动,升降齿条52和传动部件53啮合传动,如图3所示,传动部件53包括一个齿轮和一个带轮,齿轮和带轮之间固定连接,齿轮和带轮均转动连接在支撑轴22上,齿轮和升降齿条52啮合传动,升降齿条52运动时带动齿轮发生转动,齿轮带动带轮发生转动,带轮带动角度带轮54进行转动,角度带轮54带动转动支架35进行转动,转动支架35带动螺旋桨34进行转动,进而调整螺旋桨34的偏转方向,进而在飞行的过程中,需要调整螺旋桨34的偏转位置,即使得螺旋桨34发生偏转,进而产生不同方向的分力,使得装置在飞行过程中进行横移等运动,同时在伸缩机构Ⅰ51的伸缩端不发生运动时,升降齿条52不发生运动,进而传动部件53不发生运动,传动部件53控制角度带轮54不发生运动,角度带轮54控制转动支架35不发生运动,进而使得螺旋桨34的角度不发生变化,进而在飞行臂33进行摆动的过程中,螺旋桨34的角度不发生变化,使得飞行臂33的摆动和螺旋桨34的角度分离控制,进而使得装置可以在空中飞行时可以应对复杂的空中状况,使得装置的宽度在收缩和扩张时都能有效的进行横向移动。
下面结合图1至10说明第四实施例,一种智能遥感无人机结构,还包括拉动电机61和拉动框架62,支撑框架11上固定连接有拉动电机61,拉动电机61的输出轴上通过螺纹连接有拉动框架62,拉动框架62滑动连接在支撑框架11上,两个摆动耳44的内侧均滑动连接在拉动框架62上;
需要使得飞行臂33在前后的方向上发生摆动时启动拉动电机61,拉动电机61的输出轴开始转动,拉动电机61的输出轴带动拉动框架62进行运动,拉动框架62在支撑框架11上进行横向运动,支撑框架11带动两个摆动耳44的内侧进行摆动,两个摆动耳44分别带动两个间隙球体43进行运动,两个间隙球体43分别在两个间隙腔体14内进行运动,两个间隙球体43分别带动两个横移支架41进行运动,使得横移支架41在前后的方向上发生偏转,横移支架41带动飞行臂33在前后的方向上发生偏转,进而根据使用需求调整飞行臂33在前后的方向上发生偏转。
下面结合图1至10说明第五实施例,一种智能遥感无人机结构,还包括伸缩机构Ⅱ72和拉动绳72,支撑框架11设置有两个,两个连接底板13之间均固定连接有多个复位弹簧,其中一个连接底板13上固定连接有多个伸缩机构Ⅱ72,每个伸缩机构Ⅱ72的伸缩端上均固定连接有拉动绳72,多个拉动绳72的另一端均固定连接在另一个连接底板13上;
如图8、9、10所示,这里支撑框架11设置有两个,对应的支撑框架11上连接的东西也设置有对应的倍数,即将上述实施例四中的结构复制成两份,即连接底板13也对应的设置有两个,两个连接底板13之间固定连接有多个压缩弹簧,多个压缩弹簧完成两个连接底板13之间的连接;两个实施例四中的结构加上多个压缩弹簧、多个伸缩机构Ⅱ72和多个拉动绳72构成一个新的实施例,两个连接底板13之间的偏转偏转角度可以进行弯曲,进而使得两个连接底板13之间相对倾斜的角度不同,使得两个支撑框架11上的螺旋桨34产生不同方向的偏转,由于伸缩机构Ⅰ51只能控制螺旋桨34发生一个方向的偏转,两个连接底板13之间相对角度的变化,可以控制螺旋桨34发生多个方向的偏转,启动更好的控制装置运动方向的效果,控制两个连接底板13之间发生偏转时,启动伸缩机构Ⅱ72,伸缩机构Ⅱ72可以是液压缸或者电动推杆,伸缩机构Ⅱ72的伸缩端拉动对应的拉动绳72进行运动,拉动绳72拉动对应的连接底板13进行运动,使得连接底板13发生偏转,在不同的位置启动不同的伸缩机构Ⅱ72控制连接底板13在不同的方向上发生偏转,满足不同的使用需求。
需要注意的是上述实施例之间可以相互拼接使用,也可以全部结合在一起进行使用;以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种智能遥感无人机结构
- 一种基于无人机遥感数据反演的农田智能灌溉决策系统